单车模型的方向变化量
先解释一下侧偏角
汽车在行驶过程中,由于路面的侧向倾斜,侧向风或者曲线行驶时的离心力等的作用,车轮中心沿车轴方向产生一个侧向力F。因为车轮是有弹性的,所以,在侧向力F未达到车轮与地面间的最大摩擦力时,侧向力F使轮胎产生变形,使车轮倾斜,导致车轮行驶方向偏离预定的行驶路线。这种现象,就称为汽车轮胎的侧偏现象。
由于侧偏现象导致车轮实际运动的方向和车轮的方向不一致,其间的夹角就是侧偏角
运动学模型中的单车模型
这里先讨论在dt的时间内方向的变化量
使用自行车模型,我们基本上做了如下假设
- 和自行车一样,车辆是前轮驱动的
- 左右转向轮的角度和速度是一致的,也即左右轮享有同一个瞬时旋转中心 𝑂 。这样我们就能将左右轮压缩为一个轮子(这是使用自行车模型最大的好处,我们只用处理一个转向轮)
- 不需要考虑车辆的垂直运动
- 车辆是刚体
那么既然抽象成了单车,单车的特性也一目了然:
- 前轮的速度方向是沿着前轮的转向角方向(即前轮指向的方向)(这里不考虑侧偏角的影响)。
- 后轮的速度方向是沿着车辆纵向轴线的方向(即车辆的行驶方向)。
- 因为前轮和后轮都属于同一个刚体,它们的速度矢量都指向一个共同的旋转中心。
因此“瞬时转向中心(旋转中心)是车辆绕其旋转的点,它位于所有车轮的速度方向垂线线的交点处。”
ok,确认了旋转中心就可以画出单车模型的图了
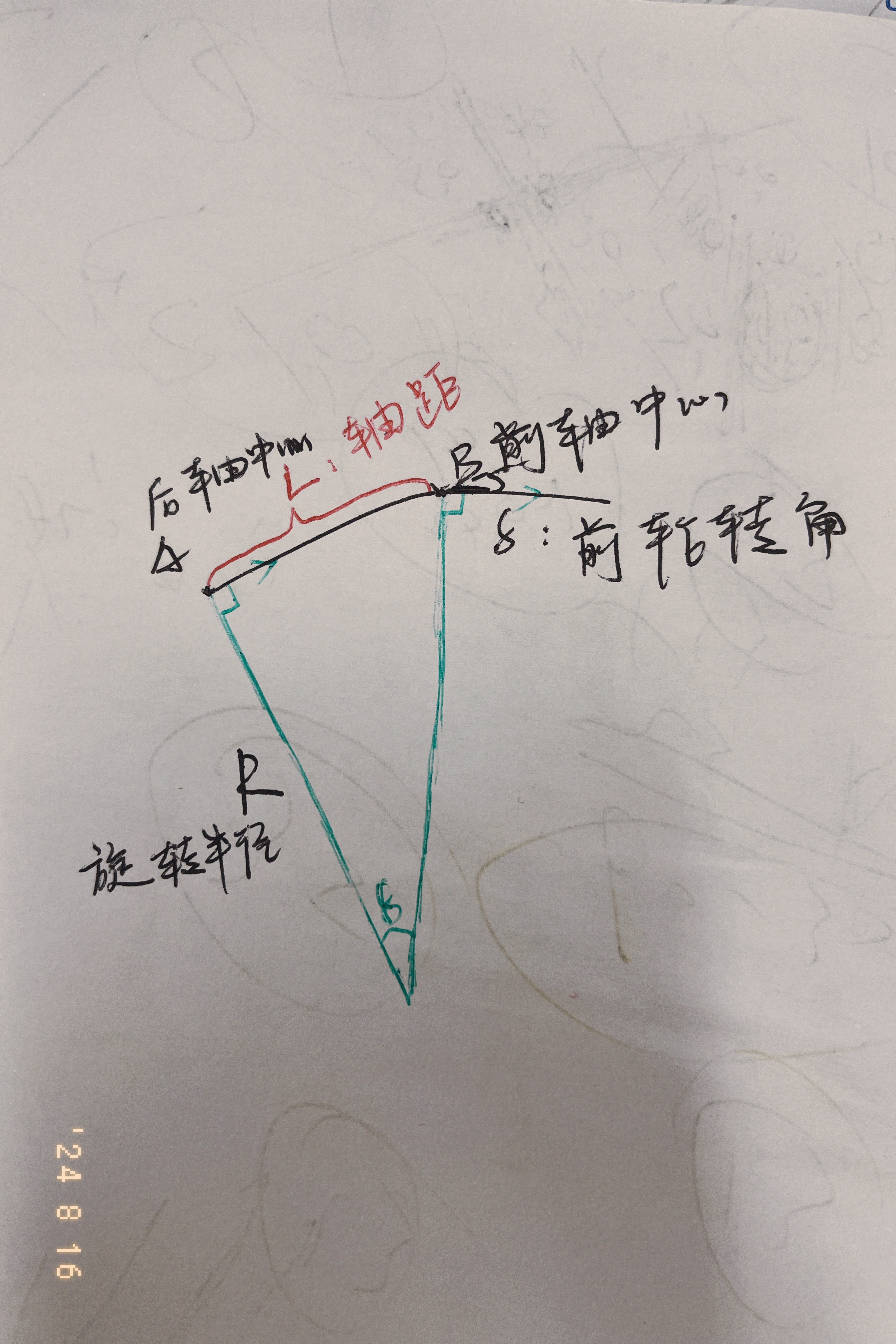
其中
A:后轴中心
B:前轴中心
L:轴距
R:旋转半径
\delta:前轮转角
如果我们想求主车在dt时间内的方向变化量怎么求呢?
设\omega为角速度
则
$$\triangle h=\omega *dt$$
根据线速度与角速度的关系
$$\omega =\frac{v}{R} $$
而根据图可知
$$R=\frac{L}{\tan \delta } $$
所以
$$\triangle h=\frac{v*\tan\delta *dt }{L} $$
自己选择的路,跪着也要走完。朋友们,虽然这个世界日益浮躁起来,只要能够为了当时纯粹的梦想和感动坚持努力下去,不管其它人怎么样,我们也能够保持自己的本色走下去。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号