[CV] Harris角点检测的详细推导
Harris角点检测
思想
为什么要检测角点呢?因为角点的特征比较明显。进行角点检测的朴素思想是利用图像梯度,也就是根据图像强度的变化来寻找角点。如图所示

这里举了个例子,给定一个小的区域(Patch),当这个小区域在不同位置滑动的时候,所呈现出来的一些特性是不同的,根据图示,有三个方面。
- Flat,平的地方,在任何方向,梯度都没什么变化。
- Edge,边的地方,当沿着边方向的时候,梯度没什么变化。
- Corner,角的地方,沿着任何方向,梯度都有变化。
Error Function
- \(x,y\)是相对于一个小patch来说的,例如一个5*5的区域
- \((u,v)\)是一个很小的移动量
- \(w(x,y)\)是windows function,也就是对于每个点的权重,例如想让中心的点权重高,可以用高斯核,一般就是全1或者高斯。
- \(I(x,y)\)就代表图像在\((x,y)\)的强度值。
- 后面做差其实就是类似求梯度一样
根据之前的讨论,在一个patch里,如果有角点的存在,各个方向的梯度值都很大,于是乎,我们的目标是让\(E(u,v)\)尽可能的大。
因为\((u,v)\)的值很小,所以我们可以利用二元函数的泰勒展开,来近似计算。
二元函数的泰勒展开,当然扔掉了一些项。
那么我们对Error function中的关键部分进行展开
所以Error Function可以近似为
这就涉及到线性代数里的二次型问题了。
简单的二次型
例如 \(f(x,y) = x^2+y^2\)的可以写作矩阵的形式
由中间这个矩阵来决定这个二次型的形状,因为我们研究的二次型只有两个变量,所以可以可视化来理解如下图所示。对形状矩阵可以进行特征分解,分为中间的对角阵(对角线都是特征值)两边是特征向量。特征向量代表了椭圆切片的长短轴的方向,而特征值平方根的倒数代表了轴的长短。至于为什么分解完会和椭圆对应,线性代数书上会有。
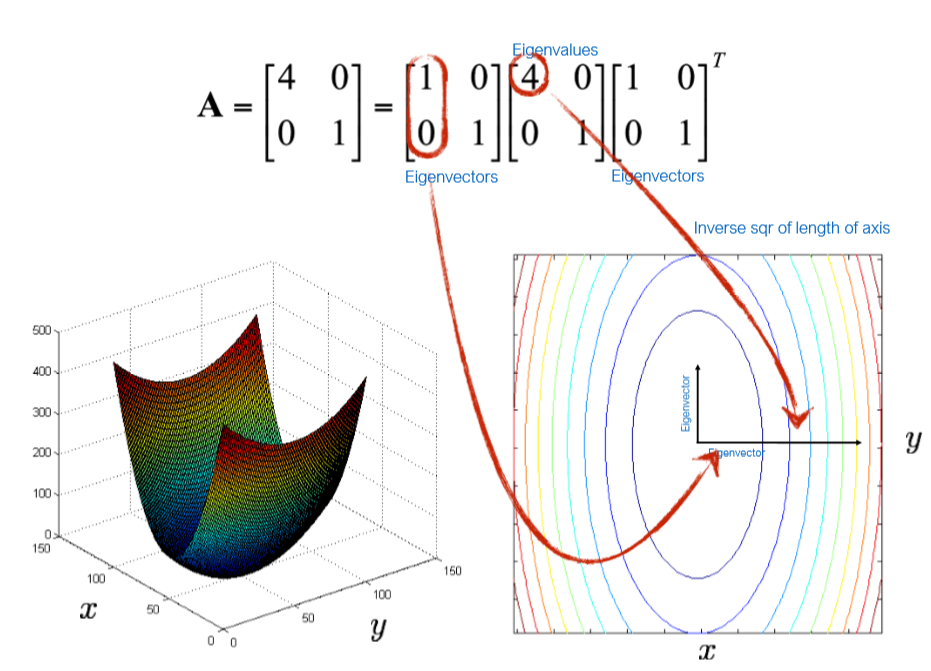
这样就把Error Function给可视化了,有了几何含义,更加直观了。
- Flat的时候,\((u,v)\)往哪个方向变化都不大,反应在几何上,应该是一个较为平坦的面
- Edge的时候,\((u,v)\)往某个方向变化大,反应在几何上,应该是某个方向翘起。
- Corner的时候,\((u,v)\)往大部分方向变化都大,反应在几何上,应该是大部分方向都翘起。
如图所示

我们可以通过两个特征值之间的大小关系,以及他们自身的关系来作为评估的依据。

当两个特征值都很大,且差不多时,意味着角点。
角点响应的度量
以上分析了,要两个特征值都很大,且同时大,那怎么来度量?于是乎在最原始的论文里,这样定义了响应函数,并且对不同的\(\lambda\)有以下的响应图
\(k\)一般在是0.04-0.06

如图所示,黄色的线是等值线,代表\(R\)的值都相同,左上角是\((0,0)\)点,往右下角去\(R\)的值越大,代表角点的响应越高,图中画了个绿线,右侧的R值基本可以判断为是角点了。另外还有一些别的响应函数,基本大同小异吧。
算法
所以现在经过以上的分析,总结一下角点检测的算法步骤。
- 计算整个图像的梯度值\(I_x,I_y\)
- 对于每个像素的\(I_{x^2}=I_xI_x,I_{y^2}=I_yI_y,I_{xy}=I_xI_y\)
- 计算每一个像素窗口的和,意思就是对于一个像素,定义一个领域例如5*5,就和之前提及的那样,然后计算这个邻域里面所有第二步计算出来的值的和。\(S_{x^2}=G_{\sigma}*I_{x^2},S_{y^2}=G_{\sigma}*I_{y^2},S_{xy}=G_{\sigma}*I_{xy}\)
- 对于每个点\((x,y)\),定义矩阵\(\begin{bmatrix}S_{x^2}&S_{xy}\\S_{xy}&S_{y^2}\end{bmatrix}\)
- 对于每个点,计算响应值\(R=Det(H)-k(Trace(H))^2\)
- 对\(R\)设定阈值,并且计算非极大值抑制(nonmax suppression, NMS),这个的意思应该就是比如5*5的邻域内有好几个点通过了阈值的筛选,那么选择最大的那个,抑制其他的点。
一些特性
- Harris角点响应具有旋转不变性,因为旋转不会改变特征值的大小。
- Harris角点响应对强度变化具有一定的不变性,缩放或者平移。因为经过缩放或者平移,最大值还是最大值,但是阈值可能要改改。
- Harris角点响应不对尺度有不变性,改变尺度可能会改变检测的结果。可能在某一尺度下检测出为角点,而另一尺度检测出为边缘。
参考
- [1]CSE486 PSU http://www.cse.psu.edu/~rtc12/CSE486/
- [2]16-385 CMU 5http://www.cs.cmu.edu/~16385/

 浙公网安备 33010602011771号
浙公网安备 33010602011771号