
Gamma校正算法原理及实现
一、Gamma校正的作用及原理
1. 什么是Gamma校正?
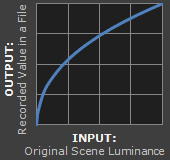
理想的显示系统(如CRT显示器)、采像设备(工业相机)与输入的视频信号(真实的图像信息)成正比,但显示系统或采像设备存在的硬件特性指数Gamma(>1)会使其输出较原始图像产生非线性失真,失真程度由具体系统的Gamma值决定,如下图所示,水平方向为真实的图像亮度,垂直方向为显示设备的输出亮度或采像设备采集到的亮度。

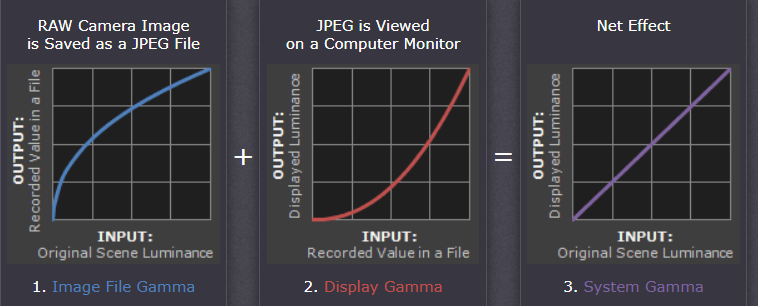
为了使显示设备的输出亮度或采像设备采集到的亮度与真实,我们可以对原始图像进行一次预补偿,既让原始真实图像产生与硬件特性指数相反的反向失真,如下图所示:
如下图所示,将产生反向失真后的图像再输出到显示系统显示则可以达到线性输出的目的,这一过程称为Gamma校正。
2. 数学定义及作用
数学定义:![]()
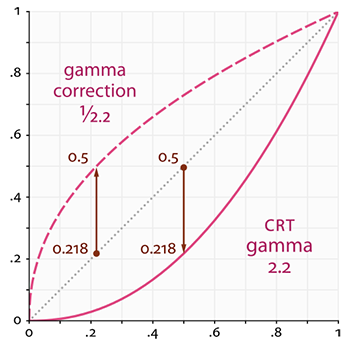
1)当r < 1时,如虚线所示,在低灰度值区域内,动态范围变大,进而图像对比度增强(当时,y的范围从[0,0.218]扩大到[0,0.5]);在高灰度值区域内,动态范围变小,图像对比度降低(当时,y的范围从[0.8,1]缩小到[0.9,1]),同时,图像整体的灰度值变大。
2)当r > 1时,如实线所示,灰度值区域的动态范围变小,高灰度值区域的动态范围变大,从而低灰度值区域图像的对比度降低,高灰度值区域图像的对比度提高。同时,图像整体的灰度值变小。
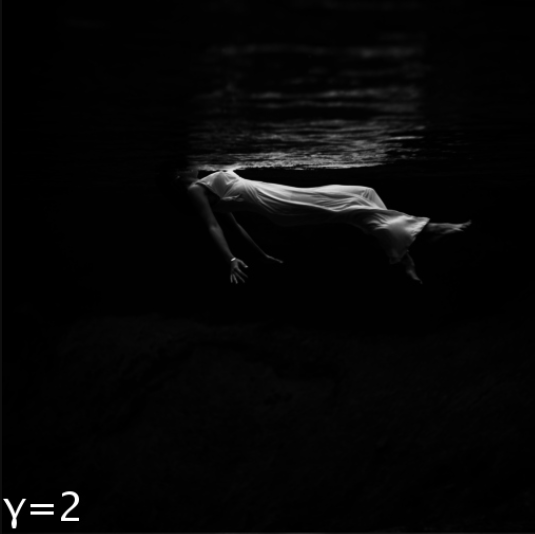
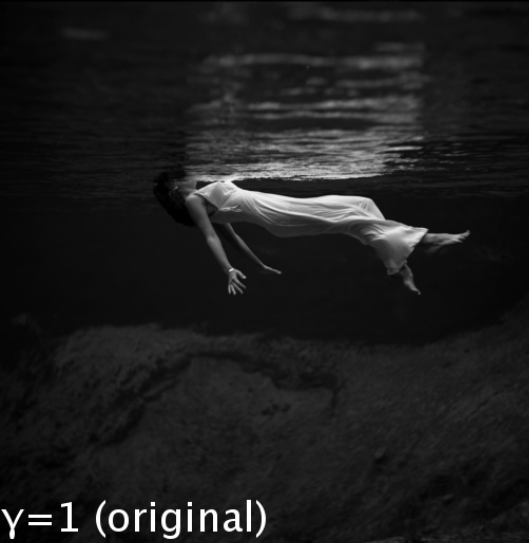
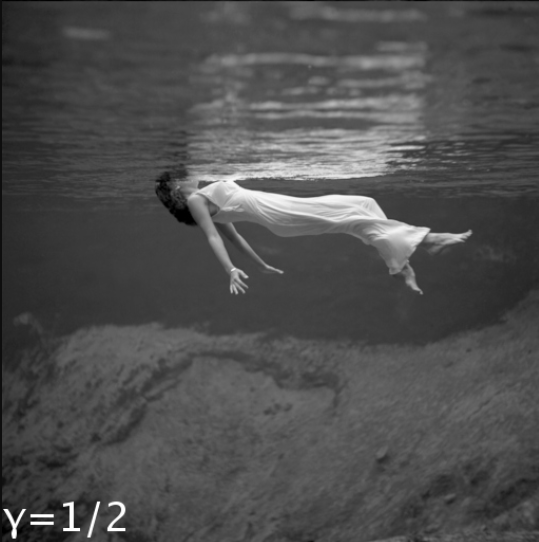
不同gamma值对应图像亮度的变化:


二、算法代码实现
假设图像中有一个像素,值是 200 ,那么对这个像素进行校正须执行如下步骤:
1. 归一化 :将像素值转换为 0 ~ 1 之间的实数。 算法如下 : ( i + 0. 5)/256 这里包含 1 个除法和 1 个加法操作。对于像素 A 而言 , 其对应的归一化值为 0. 783203 。
2. 预补偿 :根据公式 , 求出像素归一化后的 数据以 1 /gamma 为指数的对应值。这一步包含一个 求指数运算。若 gamma 值为 2. 2 , 则 1 /gamma 为 0. 454545 , 对归一化后的 A 值进行预补偿的结果就 是 0. 783203 ^0. 454545 = 0. 894872 。
3. 反归一化 :将经过预补偿的实数值反变换为 0 ~ 255 之间的整数值。具体算法为 : f*256 - 0. 5 此步骤包含一个乘法和一个减法运算。续前 例 , 将 A 的预补偿结果 0. 894872 代入上式 , 得到 A 预补偿后对应的像素值为 228 , 这个 228 就是最后送 入显示器的数据。
如果直接按上述步骤编程的话,假设图像的分辨率为 800*600 ,对它进行 gamma 校正,需要执行 48 万个浮点数乘法、除法和指数运算。效率过低。
针对上述情况,提出了一种快速算法,如果能够确知图像的像素取值范围 , 例如 , 0 ~ 255 之间的整数 , 则图像中任何一个像素值只能 是 0 到 255 这 256 个整数中的某一个 ; 在 gamma 值 已知的情况下 ,0 ~ 255 之间的任一整数 , 经过“归一 化、预补偿、反归一化”操作后 , 所对应的结果是唯一的 , 并且也落在 0 ~ 255 这个范围内。
如前例 , 已知 gamma 值为 2. 2 , 像素 A 的原始值是 200 , 就可求得 经 gamma 校正后 A 对应的预补偿值为 228 。基于上述原理 , 我们只需为 0 ~ 255 之间的每个整数执行一次预补偿操作 , 将其对应的预补偿值存入一个预先建立的 gamma 校正查找表 (LUT:Look Up Table) , 就可以使用该表对任何像素值在 0 ~ 255 之 间的图像进行 gamma 校正。
C语言代码实现
#include <math.h> typedef unsigned char UNIT8; //用 8 位无符号数表示 0~255 之间的整数 UNIT8 g_GammaLUT[256];//全局数组:包含256个元素的gamma校正查找表 //Buildtable()函数对0-255执行如下操作: //①归一化、预补偿、反归一化; //②将结果存入 gamma 查找表。 //从公式得fPrecompensation=1/gamma void BuildTable(float fPrecompensation ) { int i; float f; for( i=0;i<256;i++) { f=(i+0.5F)/256;//归一化 f=(float)pow(f,fPrecompensation);//预补偿 g_GammaLUT[i]=(UNIT8)(f*256-0.5F);//反归一化 } } void GammaCorrectiom(UNIT8 src[],int iWidth,int iHeight,float fGamma,UNIT8 Dst[]) { int iCols,iRows; BuildTable(1/fGamma);//gamma校正查找表初始化 //对图像的每个像素进行查找表矫正 for(iRows=0;iRows<iHeight;iRows++) { int pixelsNums = iRows*iWidth; for(iCols=0;iCols<iWidth;iCols++) { //Dst[iRows*iWidth+iCols]=g_GammaLUT[src[iRows*iWidth+iCols]]; Dst[pixelsNums+iCols]=g_GammaLUT[src[pixelsNums+iCols]]; } } }
OpenCv实现
#include <iostream> #include <opencv2\core\core.hpp> #include <opencv2\highgui\highgui.hpp> #include <opencv2\imgproc\imgproc.hpp> #include<cmath> using namespace cv; Mat gammaTransform(Mat &srcImage, float kFactor) { unsigned char LUT[256]; for (int i = 0; i < 256; i++) { float f = (i + 0.5f) / 255; f = (float)(pow(f, kFactor)); LUT[i] = saturate_cast<uchar>(f*255.0f - 0.5f); } Mat resultImage = srcImage.clone(); if (srcImage.channels() == 1) { MatIterator_<uchar> iterator = resultImage.begin<uchar>(); MatIterator_<uchar> iteratorEnd = resultImage.end<uchar>(); for (; iterator != iteratorEnd; iterator++) { *iterator = LUT[(*iterator)]; } } else { MatIterator_<Vec3b> iterator = resultImage.begin<Vec3b>(); MatIterator_<Vec3b> iteratorEnd = resultImage.end<Vec3b>(); for (; iterator != iteratorEnd; iterator++) { (*iterator)[0] = LUT[((*iterator)[0])];//b (*iterator)[1] = LUT[((*iterator)[1])];//g (*iterator)[2] = LUT[((*iterator)[2])];//r } } return resultImage; } int main() { Mat srcImage = imread("test.jpg"); if (!srcImage.data) { printf("could not load image...\n"); return -1; } //取两种不同的gamma值 float gamma1 = 3.33f; float gamma2 = 0.33f; float kFactor1 = 1 / gamma1; float kFactor2 = 1 / gamma2; Mat result1 = gammaTransform(srcImage, kFactor1); Mat result2 = gammaTransform(srcImage, kFactor2); imshow("srcImage", srcImage); imshow("res1", result1); imshow("res2", result2); waitKey(0); return 0; }
--------------------------------------------------------------------------------
参考
http://www.cambridgeincolour.com/tutorials/gamma-correction.htm
https://blog.csdn.net/lxy201700/article/details/24929013

