STM32 HAL库快速实战【七】《机械臂控制》--基于黑龙江科技大学机电工业机器人实训
系列目录
点击查看
- STM32 HAL库快速实战【一】《32点灯》--基于黑龙江科技大学机电工业机器人实训 - USTHzhanglu - 博客园 (cnblogs.com)
- STM32 HAL库快速实战【三】《pwm控制舵机》--基于黑龙江科技大学机电工业机器人实训 - USTHzhanglu - 博客园 (cnblogs.com)
- STM32 HAL库快速实战【四】《串口简单使用》--基于黑龙江科技大学机电工业机器人实训 - USTHzhanglu - 博客园 (cnblogs.com)
- STM32 HAL库快速实战【五】《控制串口电机》--基于黑龙江科技大学机电工业机器人实训 - USTHzhanglu - 博客园 (cnblogs.com)
- STM32 HAL库快速实战【六】《蓝牙控制》--基于黑龙江科技大学机电工业机器人实训 - USTHzhanglu - 博客园 (cnblogs.com)
- STM32 HAL库快速实战【七】《机械臂控制》--基于黑龙江科技大学机电工业机器人实训 - USTHzhanglu - 博客园 (cnblogs.com)
- STM32 HAL库快速实战【八】《声音传感器的使用》--基于黑龙江科技大学机电工业机器人实训 - USTHzhanglu - 博客园 (cnblogs.com)
- STM32 HAL库快速实战【九】《超声波传感器的使用以及自由避障》--基于黑龙江科技大学机电工业机器人实训 - USTHzhanglu - 博客园 (cnblogs.com)
- STM32 HAL库快速实战【十】《颜色传感器的使用》--基于黑龙江科技大学机电工业机器人实训 - USTHzhanglu - 博客园 (cnblogs.com)
- STM32 HAL库快速实战【十一】《红外传感器的使用及巡线循迹》--基于黑龙江科技大学机电工业机器人实训 - USTHzhanglu - 博客园 (cnblogs.com)
接线
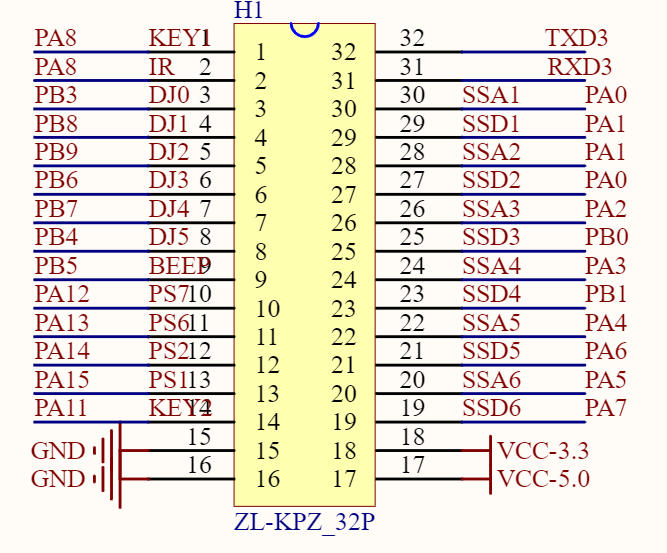
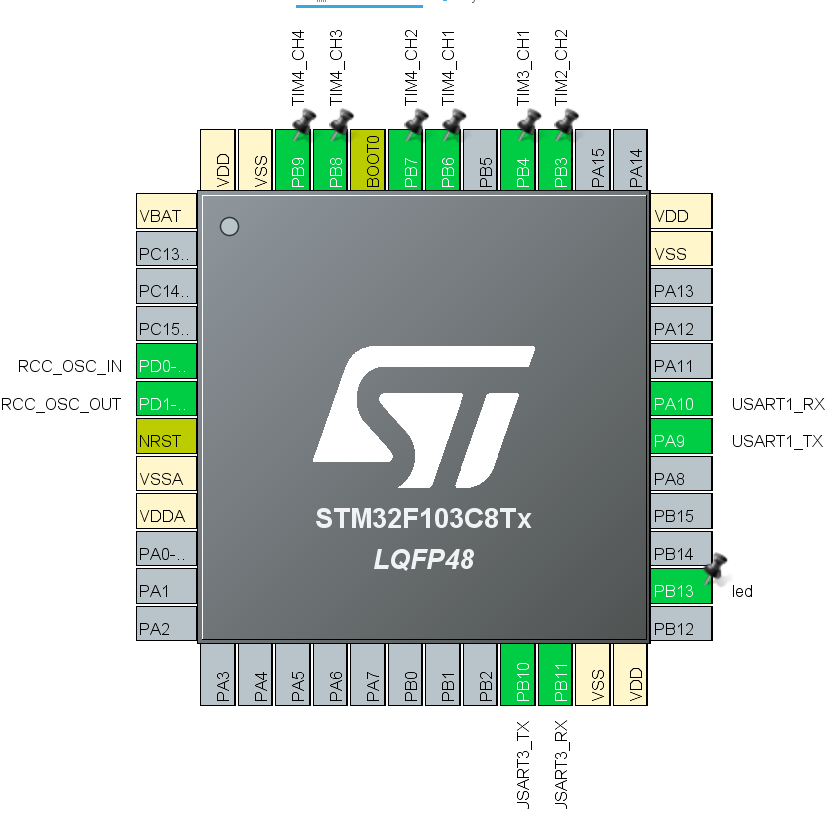
总共六个舵机,使用PB3-PB9引脚。
从下面支撑舵机到上面夹子舵机依次接DJ0到DJ5接口。
配置CubeMX
可以使用上节配置好的demo复制后继续配置,也可以重新生成,这里不多赘述。
勾选PB3-PB8,打开定时器。由于涉及到多个舵机,归零可能会造成干涉,所以所有舵机一定要调整到中位后在安装。
调整中位只需要将所有定时器通道的Pulse设置为1500即可。
配置方法同STM32 HAL库快速实战【三】《pwm控制舵机》--基于黑龙江科技大学机电工业机器人实训 - USTHzhanglu - 博客园 (cnblogs.com)
记住每个舵机对应的通道。
编写代码
生成代码后,新建robot-arm.c和robot-arm.h,放入对应文件夹以及工程中。
初始化舵机
在.h文件中添加依赖,并声明初始化函数
#include "tim.h"
#include "motor.h"
void arm_init(void);
在.c文件中定义初始化函数
#include "robot-arm.h"
/**
* @brief :初始化舵机0到舵机5,均初始化到中间位置。
* @param :void
* @retval None
**/
void arm_init(void)
{
//__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,500);修改DJ0的初始化角度为0度。
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_2);//DJ0,PB3
HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_3);//DJ1,PB8
HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_4);//DJ2,PB9
HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_1);//DJ3,PB6
HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_2);//DJ4,PB7
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1);//DJ5,PB4
return;
}
}
由于设置的Pulse为1500,所以每个舵机的初始位置都在中间位。如果需要初始时位置不同,可以修改配置工程,或者在Start之前使用__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,rad);来修改初始化位置。
控制舵机
由于我们需要一次控制六个舵机,每个舵机单独控制属实有够麻烦。我们可以定义一个数组,里面储存每次每个舵机需要运动到的角度,这样每次我们只需要修改数组,就能很方便的控制六个舵机。
/**
* @brief :控制舵机0到舵机5,左上转为正,右下转为负,DJ0-5 +-135°,DJ6+-90°
* @param :rad[6],分别储存每个舵机转动角度
* @retval None
**/
void arm_set(const int rad[6])
{
需要注意的是,__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,rad);传入的参数是占空比,但是我们需要控制的是角度,因此需要进行一个简单的运算(假设舵机处在中间位时为0°):1500+rad[x]*1000/135。同时,由于安装原因,有些舵机可能装反了,拆卸安装有够恶心的,我们可以定义一个数组声明舵机运动状态,装反的舵机只需要声明该舵机运动状态相反即可。
在robot-arm.c顶部中添加
#include "robot-arm.h"
/* 定义一个数组,说明舵机运动方向,如果实际转向相反与输入相反,则修改对应位为-1
*/
const int arm_toggle[6]={1,1,1,1,1,1};
然后我们就可以定义舵机控制函数
/**
* @brief :控制舵机0到舵机5,左上转为正,右下转为负,DJ0-5 +-135°,DJ6+-90°
* @param :rad[6],分别储存每个舵机转动角度
* @retval None
**/
void arm_set(const int rad[6])
{
int compare[6]={
1500+rad[0]*arm_toggle[0]*1000/135,
1500+rad[1]*arm_toggle[1]*1000/135,
1500+rad[2]*arm_toggle[2]*1000/135,
1500+rad[3]*arm_toggle[3]*1000/135,
1500+rad[4]*arm_toggle[4]*1000/135,
1500+rad[5]*arm_toggle[5]*1000/90,
};
__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,compare[0]);
__HAL_TIM_SetCompare(&htim4,TIM_CHANNEL_3,compare[1]);
__HAL_TIM_SetCompare(&htim4,TIM_CHANNEL_4,compare[2]);
__HAL_TIM_SetCompare(&htim4,TIM_CHANNEL_1,compare[3]);
__HAL_TIM_SetCompare(&htim4,TIM_CHANNEL_2,compare[4]);
__HAL_TIM_SetCompare(&htim3,TIM_CHANNEL_1,compare[5]);
}
在main.c中初始化arm
/* USER CODE BEGIN 2 */
motor_init();
arm_init();
HAL_Delay(2000);
HAL_GPIO_WritePin(led_GPIO_Port,led_Pin,GPIO_PIN_RESET);
/* USER CODE END 2 */
烧录程序后,机械臂会直立起来。如果角度不对,请重新安装各关节舵机。
调节各关节角度
有了舵机控制代码,我们可以方便的调节舵机角度,但是手动控制过于繁琐,实际使用时更偏向于自动化控制。最好的方法是建立机械臂运动模型,但是难度较高。在这里我们选择一种简单类似于示教机器人的方法,通过记录每次动作的角度状态,在不同动作间直接切换即可。
首先,需要实时获取当前关节角度。为了方便使用,这里封装成一个函数:
/**
* @brief 打印当前关节角度
* @param :arm_rad[6],分别储存每个舵机转动角度
* @retval None
**/
void printf_rad(const int arm_rad[6])
{ char cmd_return[128];
sprintf(cmd_return, "{rad:%d,%d,%d,%d,%d,%d}",arm_rad[0],arm_rad[1],arm_rad[2],arm_rad[3],arm_rad[4],arm_rad[5]);
usart_send_str(&huart3,(unsigned char *)cmd_return);
return;
}
然后定义一个get_rad函数,用于获取输入的命令,调节舵机角度
点击查看代码
/**
* @brief :控制舵机0到舵机5,并打印当前角度
* @param :None
* @retval None
**/
void get_rad(void)
{
char menu;
int arm_status=1;
int rad[6]={0,0,0,0,0,0};
while( arm_status)
{menu=get_cmd();
switch(menu)
{
case 'A':rad[0]++;break;
case 'B':rad[0]--;break;
case 'C':rad[1]++;break;
case 'D':rad[1]--;break;
case 'E':rad[2]++;break;
case 'F':rad[2]--;break;
case 'G':rad[3]++;break;
case 'H':rad[3]--;break;
case 'I':rad[4]++;break;
case 'J':rad[4]--;break;
case 'K':rad[5]++;break;
case 'L':rad[5]--;break;
case 'Q':arm_status=0;break;
}
printf_rad(rad);
arm_set(rad);
menu=NULL;
}
return;
}
同时在.h文件中声明函数
#include "tim.h"
#include "motor.h"
void arm_init(void);
void arm_set(const int rad[6]);
void printf_rad(const int arm_rad[6]);
void get_rad(void);
在main.c的switch中新增一个选项
switch(input)
{
case '0':get_rad();break;
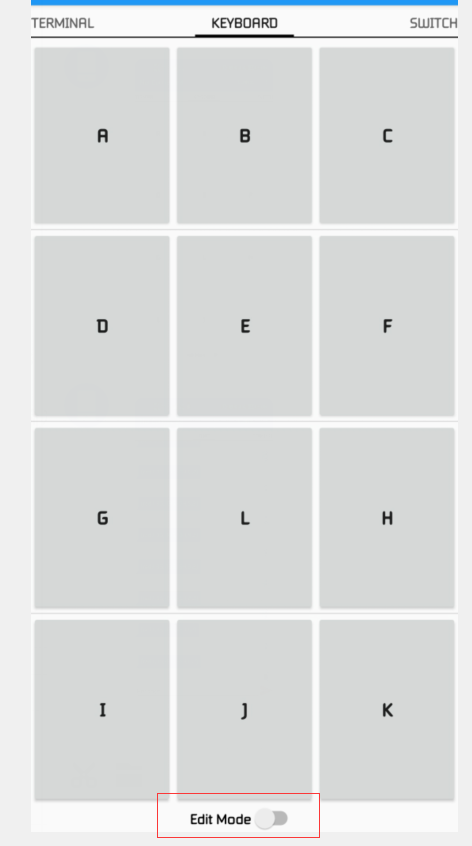
通过蓝牙控制,输入0进入舵机调节菜单,然后输入A-L调节关节,输入Q退出调节菜单。
可以在BlueSPP中切换到键盘界面,快速调节
然后在CHAT界面查看当前角度。
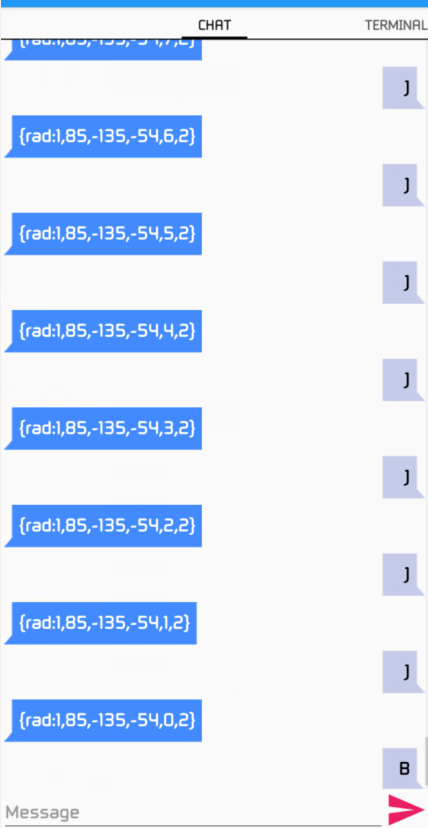
记录不同动作的角度,例如待机时为{0,85,-135,-54,0,0},在.c文件顶部定义:
/* 关节初始状态*/
const int arm_begin[6]={0,85,-135,-54,0,0};
然后就可以直接执行关节动作。例如初始化舵机时直接初始化到待机位置
void arm_init(void)
{
arm_set(arm_begin);
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_2);//DJ0,PB3
工程源码
国内用户请使用gitee克隆或是使用代理访问Github
https://github.com/USTHzhanglu/stm32-hal/tree/main/robot-arm

 浙公网安备 33010602011771号
浙公网安备 33010602011771号