基于全志T507-H的Linux-RT + Igh EtherCAT主站案例分享
本文将为各位工程师演示全志T507-H工业评估板(TLT507-EVM)基于IgH EtherCAT控制伺服电机方法,生动说明Linux-RT + Igh EtherCAT的强大之处!
同时,我们对于T3/A40i、T113-i、RK3568、RK3588J、AM62x、AM64x、NXP i.MX 8M Plus等平台也提供了开源EtherCAT主站IgH案例。
Linux-RT系统的优势
- 内核开源、免费、功能完善。
- RT PREEMPT补丁,使Linux内核成为硬实时操作系统,无需完整的内核重写。
- 既有实时性,又有相同的开发生态系统(包括相同工具链、文件系统和安装方法,以及相同的POSIX API等),实现产品快速上市的期望。
Linux-RT实时性测试(Cyclictest工具)
Cyclictest常用于实时系统的基准测试,是评估实时系统相对性能的最常用工具之一。Cyclictest反复测量并精确统计线程的实际唤醒时间,以提供有关系统的延迟信息。它可测量由硬件、固件和操作系统引起的实时系统的延迟。
基于全志T507-H(硬件平台:创龙科技TLT507-EVM评估板),按照创龙科技提供的案例用户手册进行操作,使用Cyclictest程序测试系统实时性,得出如下测试结果。
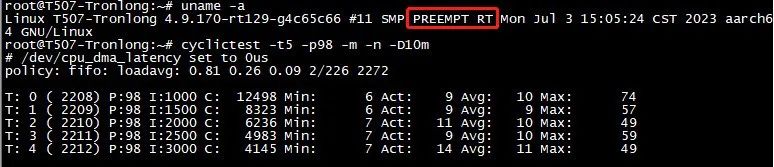
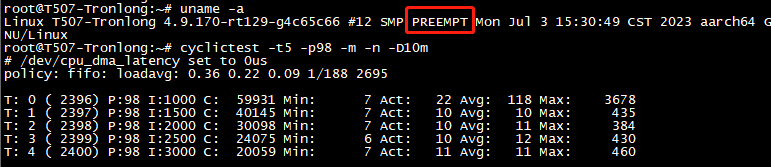
对比测试数据,可看到基于Linux-RT-4.9.170内核的系统的延时更加稳定,最大延时更低,系统实时性更佳。
Linux-RT性能测试
基于全志T507-H(硬件平台:创龙科技TLT507-EVM评估板),按照创龙科技提供的案例用户手册进行操作,测试分别在CPU空载、满负荷(运行stress压力测试工具)、隔离CPU核心的情况下,得出如下测试结果。
备注:测试数据与实际测试环境有关,仅供参考。
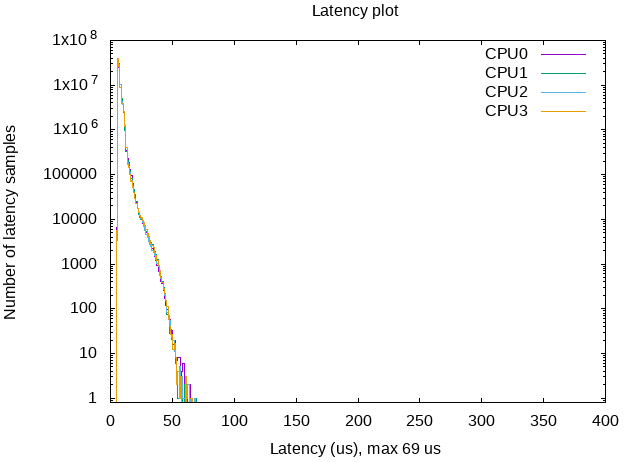
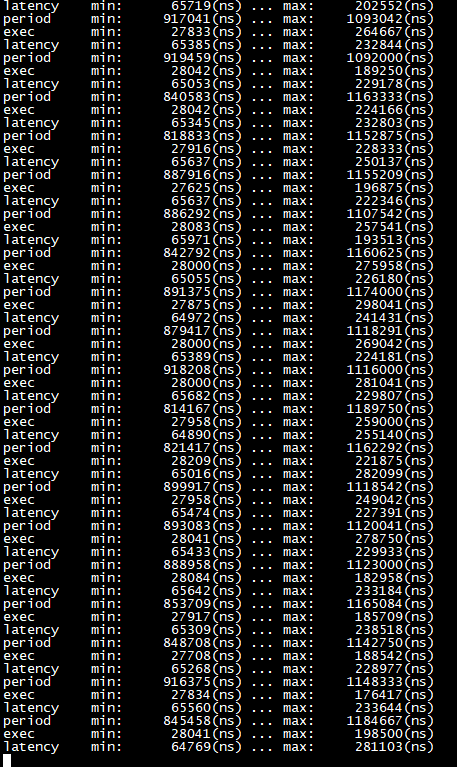
CPU空载状态测试,CPU0、CPU1核心Max Latencies值最大,为69us,CPU3核心的Max Latencies值最小,为66us。
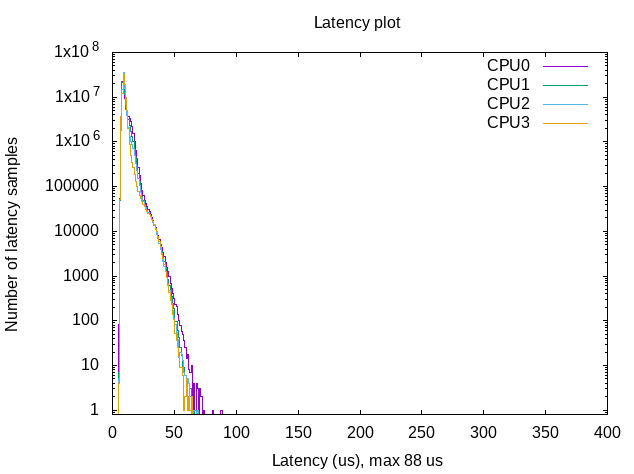
CPU满负荷状态测试,CPU0核心Max Latencies值最大,为88us,CPU3核心的Max Latencies值最小,为64us。
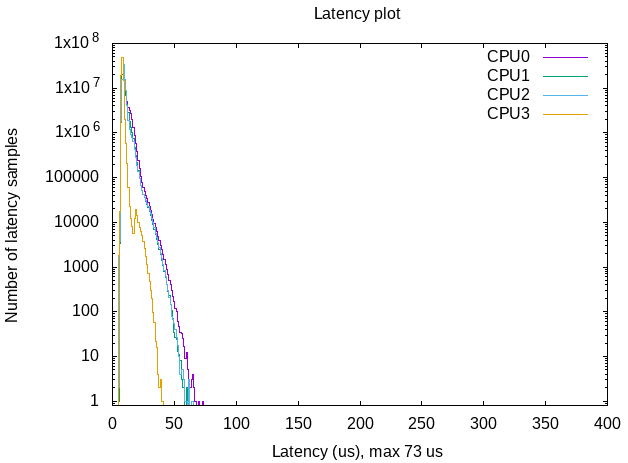
隔离CPU核心状态测试,CPU0核心Max Latencies值最大,为73us,隔离CPU3核心的Max Latencies值最小,为41us。
测试结果如下表所示:
| Max Latencies | ||
| 最小值 | 最大值 | |
| CPU空载状态 | 66us(CPU3) | 69us(CPU0、CPU1) |
| CPU满负荷状态 | 64us(CPU3) | 88us(CPU0) |
| 隔离CPU核心状态 | 41us(CPU3) | 73us(CPU0) |
根据CPU空载、CPU满负荷、隔离CPU核心三种状态的测试结果可知:当程序指定至隔离的CPU3核心上运行时,Linux系统延迟最低,可有效提高系统实时性。故推荐对实时性要求较高的程序(功能)指定至T507-H隔离的CPU核心运行。
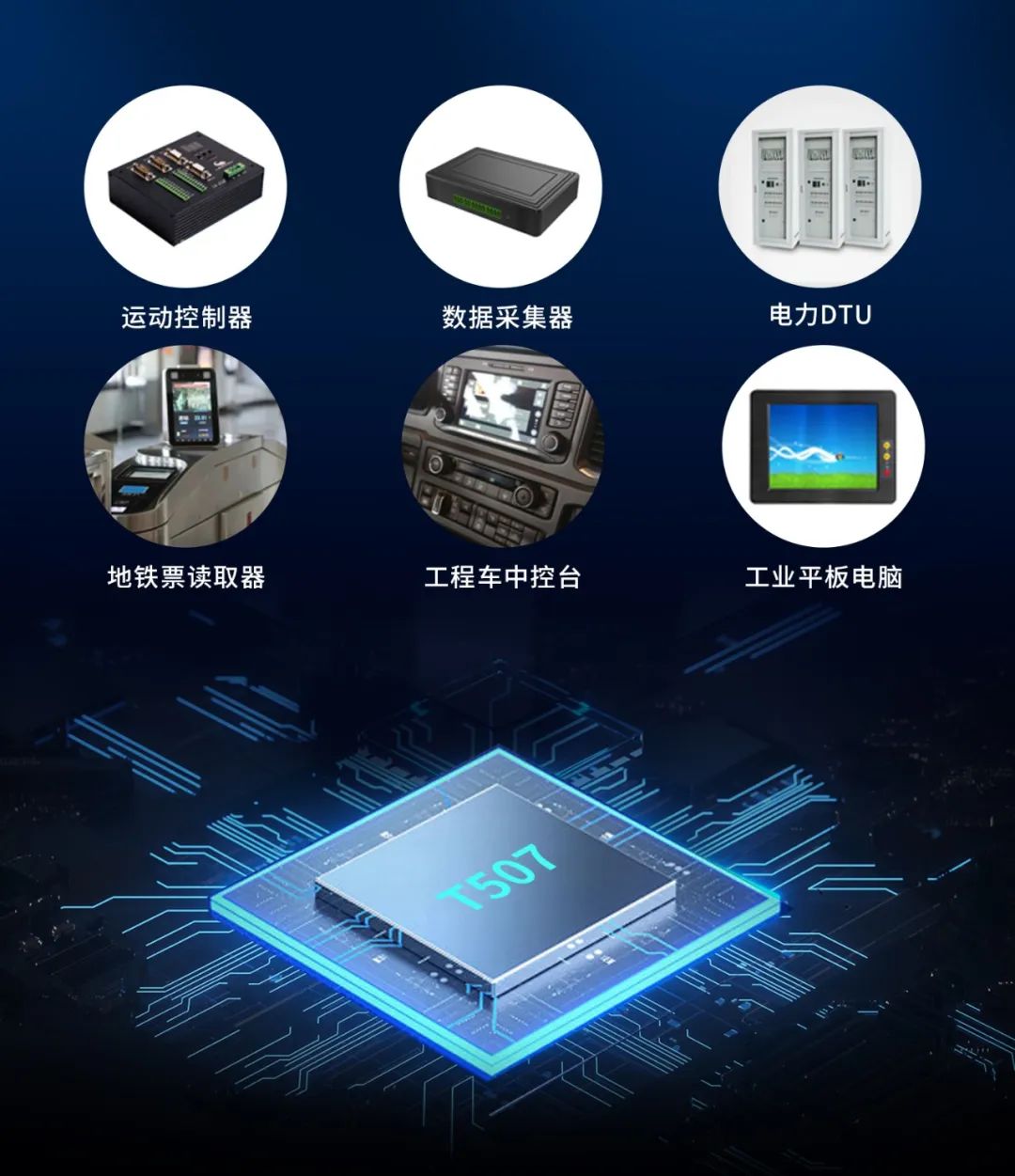
T507-H的典型应用领域
基于全志T507-H的Linux-RT + IgH EtherCAT主站演示
下文主要介绍基于全志T507-H(硬件平台:创龙科技TLT507-EVM评估板)案例,按照创龙科技提供的案例用户手册进行操作得出测试结果。本次演示的开发环境:
Windows开发环境:Windows 7 64bit、Windows 10 64bit
Linux开发环境:Ubuntu18.04.4 64bit
虚拟机:VMware16.2.5
U-Boot:U-Boot 2018
Kernel:Linux-RT-4.9.170
LinuxSDK:LinuxSDK-[版本号].tar.gz(基于全志官方V2.0_20220618)
IgH EtherCAT:ethercat-stable-1.5-gcd0d17d-20210723
伺服驱动器:台达ASD-A2-0121-E
伺服电机:台达ECMA-C10401GS
*硬件平台:TLT507-EVM评估板(基于全志T507-H)
IgH EtherCAT简介
IgH EtherCAT为运行于Linux系统的免费开源EtherCAT主站程序,框架如下所示,官方文档:https://www.etherlab.org/download/ethercat/ethercat-1.5.2.pdf。
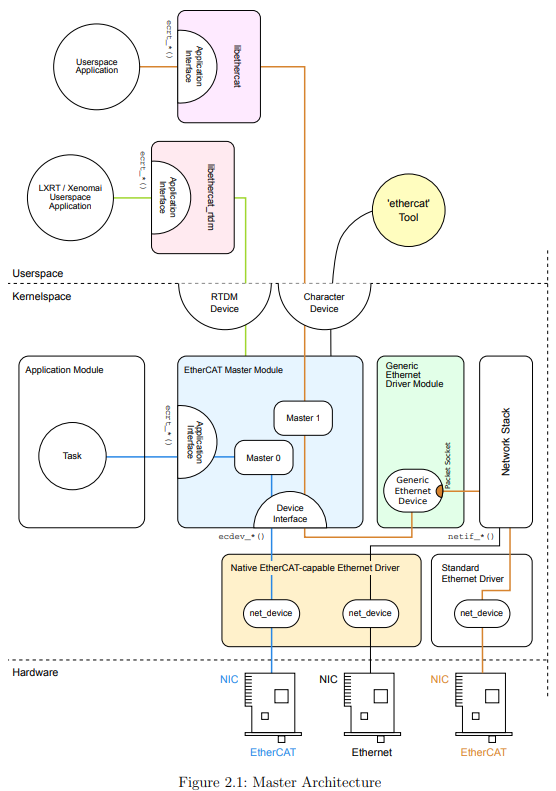
IgH EtherCAT主站通过构建Linux字符设备,应用程序通过对字符设备的访问实现与EtherCAT主站模块的通信。
IgH EtherCAT开发包提供EtherCAT工具,该工具提供各种可在Linux用户层运行的命令,可直接实现对从站的访问和设置,如设置从站地址、显示总线配置、显示PDO数据、读写SDO参数等。
IgH EtherCAT官网:https://www.etherlab.org/en/ethercat。
案例说明
案例功能:EtherCAT通讯周期时间为1ms,控制伺服电机正转和反转,并通过串口循环打印EtherCAT通讯周期时间的最大值和最小值。
(1)正转:伺服电机目标速度从0加速到10000,当达到10000速度后,控制伺服电机减速至0,循环运行。
(2)反转:伺服电机目标速度从0加速到-10000,当达到-10000速度后,控制伺服电机减速至0,循环运行。
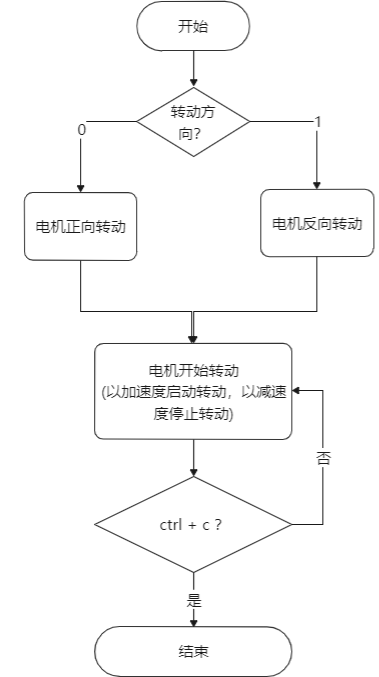
图8
为便于测试,我司提供已验证的基于Linux-RT编译生成的内核镜像文件和内核模块,位于产品资料“4-软件资料\Linux\Kernel\image\linux-4.9.170-[版本号]-[Git系列号]\”目录下。
请将Linux-RT内核镜像boot-rt.fex和Linux-RT内核配套的内核模块modules-rt目录下4.9.170-[版本号]-[Git系列号].tar.gz压缩包的拷贝至评估板文件系统目录下。
执行如下命令,将boot-rt.fex重命名为boot.fex,同时将内核模块压缩包解压。
Target#mv boot-rt.fex boot.fex
Target#tar -zxf 4.9.170-rt129-g4c65c66.tar.gz

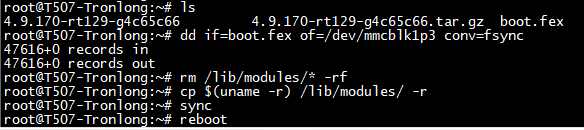
执行如下命令替换内核镜像和内核模块,评估板重启生效。
备注:mmcblk1为Micro SD对应的设备节点,如需固化至eMMC,请将设备节点修改为mmcblk0。
Target#dd if=boot.fex of=/dev/mmcblk1p3 conv=fsync
Target#rm /lib/modules/* -rf
Target#cp $(uname -r) /lib/modules/ -r
Target#sync
Target#reboot

案例测试
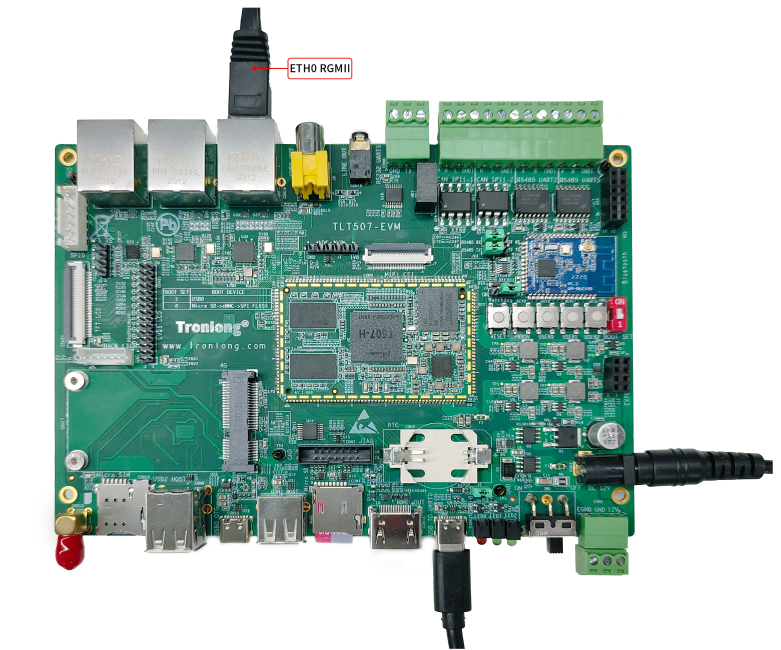
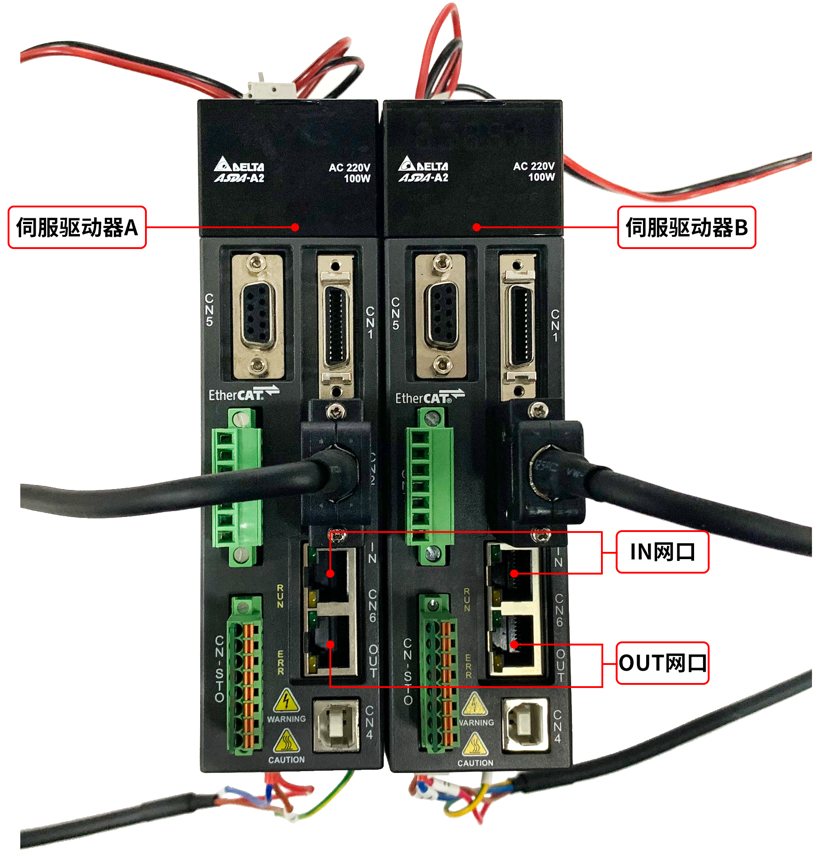
请按下图所示使用网线连接评估板ETH0 RGMII网口和伺服驱动器A的IN网口,将伺服驱动器A的OUT网口使用网线连接至伺服驱动器B的IN网口。
为便于测试,我司提供的经验证的IgH EtherCAT主站程序为案例"igh_ethercat\images\"目录下的ethercat-stable-1.5-gcd0d17d.tar.gz压缩包,将其拷贝至评估板文件系统任意目录下。
执行如下命令,解压ethercat-stable-1.5-gcd0d17d.tar.gz压缩包将会得到_install文件夹。
Target#tar -zxf ethercat-stable-1.5-gcd0d17d.tar.gz

执行如下命令,并查询评估板网卡物理地址。
Target#ifconfig
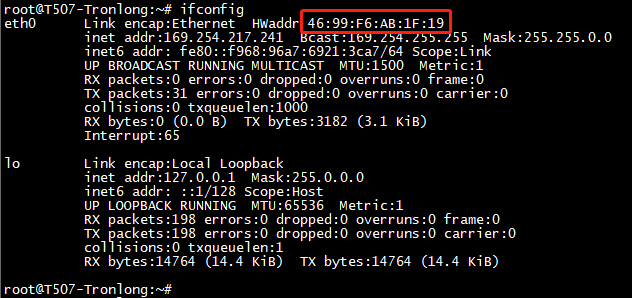
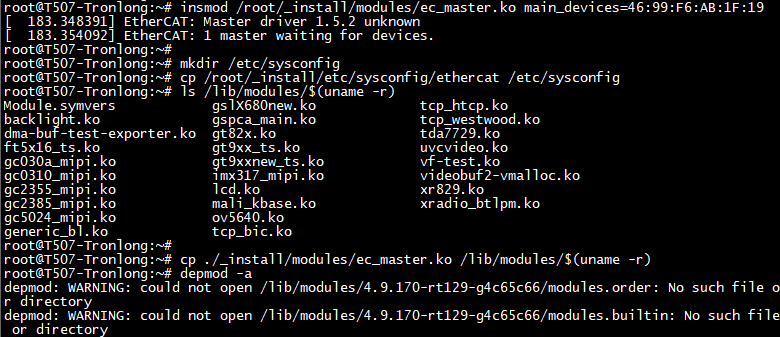
执行如下命令,加载驱动模块。
Target#insmod -f /root/_install/modules/ec_master.ko main_devices=46:99:F6:AB:1F:19

执行如下命令,拷贝EtherCAT主站相关文件至评估板文件系统。
Target#mkdir /etc/sysconfig
Target#cp /root/_install/etc/sysconfig/ethercat /etc/sysconfig
Target#ls /lib/modules/$(uname -r)//查看是否已创建modules目录
Target#cp ./_install/modules/ec_master.ko /lib/modules/$(uname -r)
Target#depmod -a //同步模块依赖关系,同步过程中打印警告请忽略
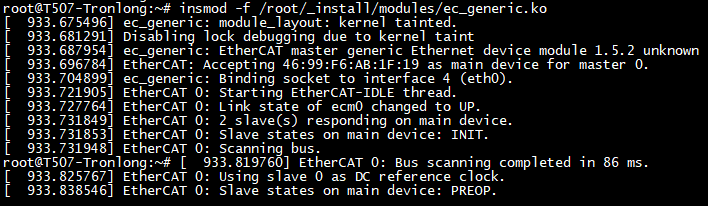
执行如下命令,启动EtherCAT主站。
Target#/root/_install/etc/init.d/ethercat start

执行如下命令,加载ec_generic.ko驱动文件。
Target#insmod -f /root/_install/modules/ec_generic.ko
执行如下命令,添加IgH动态链接库路径。
Target#export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/root/_install/lib

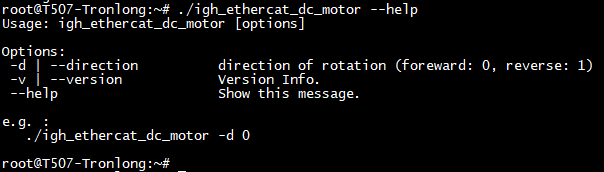
将案例bin目录下的igh_ethercat_dc_motor可执行文件拷贝至评估板文件系统,执行如下命令查看参数信息。
Target#./igh_ethercat_dc_motor --help
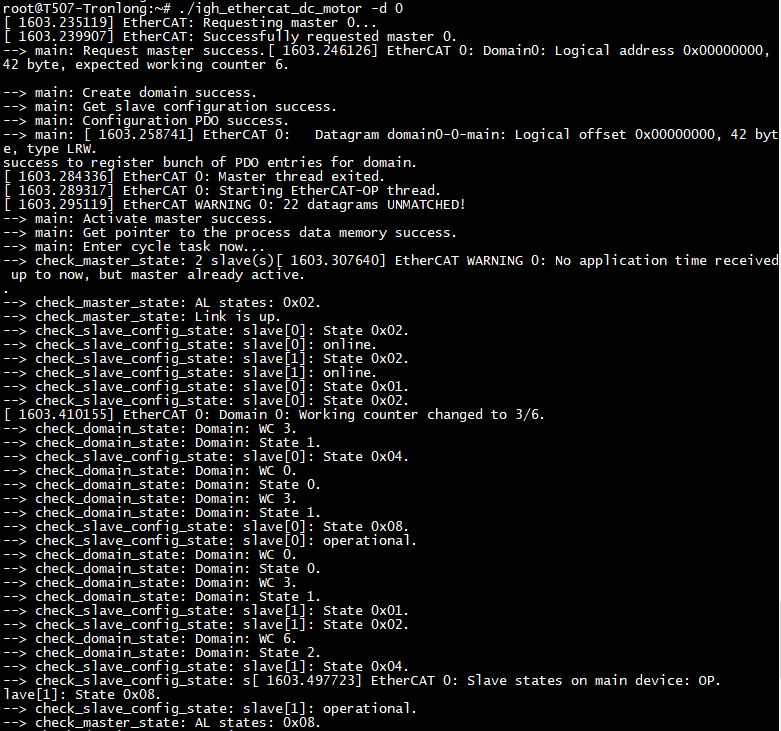
执行如下命令,控制两台伺服电机同时正转。
Target#./igh_ethercat_dc_motor -d 0
按下"Ctrl + C",停止运行程序。
执行如下命令,控制两台伺服电机同时反转。
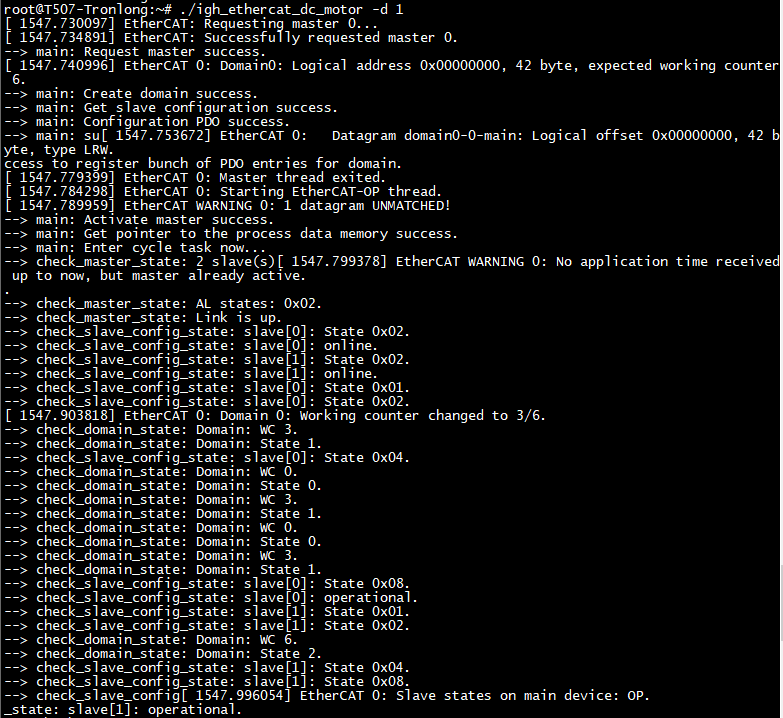
Target#./igh_ethercat_dc_motor -d 1
按下"Ctrl + C",停止运行程序。
测试结果如下表所示:
|
工程环境 |
控制算法 |
点对点控制 x 2轴 |
|
|
循环周期 |
1ms |
||
|
测试结果 |
测试项 |
Min(us) |
Max(us) |
|
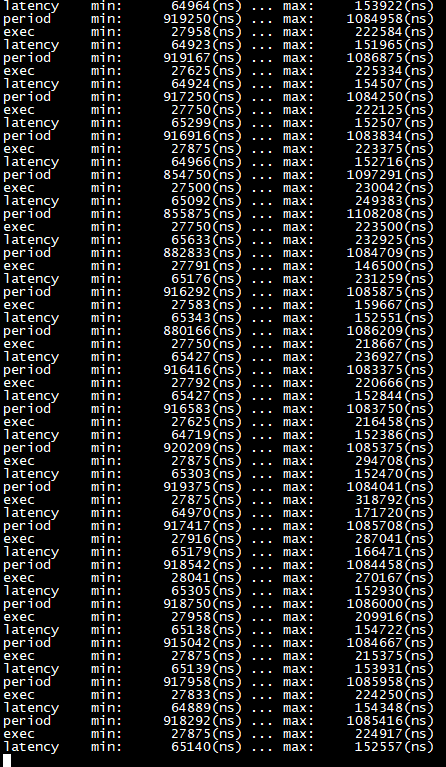
EtherCAT 任务调度抖动(period) |
-186 |
184 |
|
|
测试数据 |
EtherCAT任务调度抖动的区间为[-186us,184us] |
||
参数解析:
(1)latency:等待唤醒时间(ns)。
(2)period:EtherCAT通讯周期时间(ns)。
(3)exec:接收和发送EtherCAT数据时间(ns)。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号