Grand Theft Auto V (侠盗列车手5)图形研究
原文地址:http://www.adriancourreges.com/blog/2015/11/02/gta-v-graphics-study/
原文的简介:
GTA(侠盗猎车)系列自从1997年首部发售以来有了很大的进步,两年前,Rockstar发布的GTAV获得了成功,首日1100万套的销量打破了7项吉尼斯世界记录。
![]()
![]()
![]()
![]()
![]()
![]() 从外面看的立方体
从外面看的立方体
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
在PS3上游玩时,游戏的完成水准和技术质量给我留下了深刻印象。加载屏幕是最影响体验的:而在GTA中你可以游戏几个小时,在一个巨大的开放世界中驾车数百公里,而没有任何的中断。考虑到大量资源的Streaming和PS3的硬件规格(256M内存和256显存),很惊讶20分钟都不会崩溃,这样真正的技术实力。
这里要讨论的是Directx 11的PC版,使用了几个G的内存和GPU显存,尽管这里讨论的是PC的规格,但大部分应该也是适用于PS4和PS3的。
Frame分析
这是我们要分析的帧,有主角麦克和他的Rapid GT,以漂亮的洛杉矶为背景。

GTA V使用的是延迟渲染管线( Deferred Rendering Pipeline),使用多张HDR(高动态范围) Buffer来工作。但HDR不能直接正确的显示在显示器上,所以通过后处理用简单的Reinhard 操作(一种Tone mapping算法,可以把高动态范围映射到的动态范围)把他们转回到8位每个通道。
Environment Cubemap 环境立方图
第一步,是在游戏里渲染Cumbemap, 这张Cumbemap是每帧上实时生成的,用来渲染后面真实的反射效果。这部分是前渲染的(forward-rendered)。Cumbemap是如何被渲染的?对于不熟悉这技术的人来说,这个就像是现实世界的拍摄全景图片,把相机放在三脚架上,想象你正好站在一个大的立方体中心,并拍摄这个立方体的六个面,每拍摄1次旋转90度。
这正是游戏所做的:每个面被渲染到一张128x128的 HDR Texture上,第一个面的渲染就像这样:




把剩下的5个面用相同的处理重复进行,最后获得Cubemap
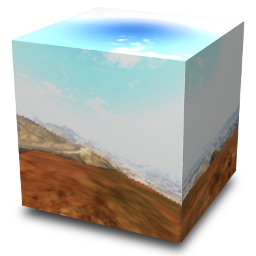 从外面看的立方体
从外面看的立方体渲染每个面大约有30个Draw Call,渲染的网格多边形数非常少,只有“风景”被绘制,(地形,天空,某些建筑),这就是为什么游戏里车辆的环境反射做的相当好,但其他的车辆和角色并不能被反射到。
Cubemap生成Spheremap
接下来,我们把获得的Cumbemap转换成一张Spheremap


Spheremap

为什么要这么转换,我想通常这是在做优化:一个Cubemap在Fragment Shader里,潜在的是访问6个面的128x128 texel,这里用Spheremap降低为两个“半球”的128x128 texel,更好的是,因为相机通常是在车顶,大多只访问顶部的半球就可以。
球面投影在顶部和底部保留了反射的细节,而牺牲了侧面。这对GTA V来说很有用:车顶和车罩通常是面朝上的,它们主要的是要来自顶部的反射获得更好的表现。
Culling和LOD(Level of Detail)
这一步由Compute Shader来处理的,无法用图片来解释。
基于到相机的距离,决定物体对像是用低模还是高模绘制,或者不绘制。
例如,超出一定距离的花草不再绘制,所以这步要计算每一个设置了LOD的物体对象。
这个计算实际在管线的位置在PS3与PC和PS4是不同的,在PS3上,所有这些计算都是运行在Cell的SPU上的。
G-Buffer 生成
渲染“主要”发生在这里,所有可见的Mesh一个个的绘制,但不会立刻进行着色计算,这些Draw Call只需要输出一些简单的着色用信息到叫做G-Buffer的不同缓冲中,GTA V里使用MRT,这样每个Draw Call可以一次输出到5个Render Target里。
然后,所有的这些缓冲用来合并计算每个Pixel的最终着色。因此,和“Deferred”相对的“Forward”。 这一步只有不透明物体被绘制,例如玻璃的透明Mesh需要在延迟管线中特别的延后处理。





所有的这些Render Target都是LDR buffers (RGBA, 8 bits per channel) 保存了各种信息,参与最后着色值的计算。
这些缓冲有:
Diffuse map:它保存的是Mesh的“内在颜色”(Albedo),代表了材质的一个属性,在理论上是没有受光照影响的。但你有注意到车辆上的白色高光么。有趣的是,GTA V 中是在输出到Diffuse map之前,先计算从太阳方向光的着色结果。
Alpha通道包含了一些“Blend”用的特殊信息(后面解释)。
Normal map :在每个Pixel(RGB)里保存法线向量信息(世界空间)。Alpha通道也被使用到,但不确定是用的什么方法,看起来像是一些植物接近相机的二进制Mask。
Specular map:包含了关于 specular/reflectance的信息。
Red: specular intensity
Green: glossiness (smoothness)
Blue: fresnel intensity (通常属于相同材质的所有Pixel都是常量)
Irradiance map:Red通道看起来是包含的每个Pixel接受太阳光的irradiance(通过Pixel的法线和位置,以及太阳照射方向),这里不能100%确定通道的作用,看起来像是受第二光源产生的irradiance 。Blue是Pixel的emissive(自发光)信息(霓虹灯和电灯泡使用)。Alpha通道除了标记对应的角色皮肤或植物外,大部分不会被使用。
那么,前面我们提到输出了5个render target,但这里只展示了其中的4个。最后一个RT,是特殊的depth-stencil buffer。下面是在Pass最后看到的结果。


Depth map : 它保存了每个Pixel到相机的距离。
直观的看,你会认为远处的Pixel是白色(深度为1)而越近处的Pixel越黑。这里的情况有所不同,: GTA V看起来使用的是logarithmic Z-buffer,并使用了reversed-Z(Z的倒数)。这么做是因为深度被encode了,这样浮点数越接近0,精度越高。Reversed-Z可以在排序深度非常接近的物体时有更高的精度,大大降低了 Z-fighting。这种方法在很长绘制距离的游戏里是必须的。也不是什么新技术,例如Just Cause 2 中也使用了类似的技术。

Stencil: 用来识别不同类型的Mesh绘制,同一种类的Mesh的所有Pixel赋予相同的ID。例如一些stencil 值就是:
0x89: 玩家控制的角色
0x82: 玩家驾驶的车辆
0x01: NPCs
0x02: 类似汽车,自行车的交通工具
0x03: 植被和树叶
0x07: 天空
生成所有的这些Buffer大约要1900的Draw Call
要注意的是,场景的渲染是“从前向后”这种方法的优化是得益于“early Z rejection”,当场景被绘制时,很多的Fragment因为被更近处绘制的Pixel遮挡,没有通过深度测试。如果Pixel没有通过深度测试,那么GPU会把自动丢弃它,并且也会执行Pixel Shader。当你有大量的Pixel Shader时,“从后向前”渲染(画家算法)是一种性能方面最差的选择,而“从前向后”则是最优的。
顺便说一下,为了解释alpha通道在Diffuse Map中起的作用,来看下下面的截图:

这里可以注意到一些Pixel的缺失,特别是树木上看的更明显,就好像他们的Sprite上缺失了Texel。
我在PS3上也几次注意到这些缺陷(artifacts ),那时让我很不解。当Texture Sprite变得很小时,它会走样么? 现在我可以看到他们所以的Mipmap都是正确的,并不会产生走样问题。这个pattern很特殊,就好像是棋盘格那样,游戏渲染会跳过渲染的两个Pixel中的一个。为了确认这一点,我查看了D3D的字节码,果然:
dp2 r1.y, v0.xyxx, l(0.5, 0.5, 0.0, 0.0) // Dot product of the pixel's (x,y) with (0.5, 0.5)
frc r1.y, r1.y // Keeps only the fractional part: always 0.0 or 0.5
lt r1.y, r1.y, l(0.5) // Test if the fractional part is smaller than 0.5
这些指令都很简单,相当于测试 (x + y) % 2 == 0 ,2个Pixel中的1个会被pass掉(x和y是Pixel坐标),这只是其中的几个丢弃像素的条件之一(另一个是 当alpha < 0.75 ),但足够解释这个ditehr pattern了。
为了记住那些Mesh要用“dithered mode”绘制,这个信息就要保存在diffuse map的alpha通道中,就像下图所看到的那样。我认为这个模式是用在很远的距离或者是在LOD层次间过渡的,通过抛弃一些Pixel,节省了填充率和着色计算。

Shadows 阴影
游戏的阴影使用了CSM (cascaded shadow maps):把4张shadow map生成到1张1024x4096的texture里,每张shadow map是由不同的t camera frustum创建的,随着迭代的进行,frustum获取了更大并包含更多的场景部分,这就确保了接近玩家的阴影用更高的分辨率保存,阴影越远细节也更少。下面4幅图是深度信息的预览:

这样做可以会有很高的消耗,因为需要渲染场景4次,但frustum-culling避免了不必要的多边形渲染。这里的CSM大约产生了1000个draw calls
通过这些深度信息,我们可以计算每个Pixel的阴影投射。引擎把阴影信息保存在 render targe中:由太阳方向光投射的阴影在Red通道,大气中云投射的阴影同时保存在Red和Green通道
shadow maps通过 dithering pattern 来采样(如果你仔细看下面的Texture,Red通道显示就像棋盘格那样)这样做是为了让阴影的边缘更加平滑。
然后这些缺陷会被修正,太阳的阴影和云的阴影合并到一张Buffer里,进行一些深度上的模糊(Blur)再把结果保存到specular map的alpha通道中。


模糊操作的一个快速的说明:这个操作非常的昂贵,因为它需要从多张texture里获取数据。所以为了减低负荷,在执行模糊处理前,提前创建一个Texture:把Shadow Buffer降采样到1/8,再调用4次称作 Gather()的由Pixel Shader执行的轻量的模糊处理。这样可以给予一个轻量的估算,那些Pixel是被完全照明(没有阴影)的。然后在执行完整的深度感知的模糊时,第一步先读取这个提前创建的Buffer,如果这个像素是被完全照亮的,那么 pixel shader 立即输出为1并跳全部沉重的模糊计算。
Planar Reflection Map 平面反射贴图
这里不会涉及太多的细节,反射部分会在第2部分详细解释。在我们选取的这个场景中几乎看不到这个效果,但是这一部分是用来产生海水表面的reflection map。基本上是把场景再一次绘制到(650 draw Call)一张240x120的Texture上,只是颠倒了,这样看起来是反射在水面上。

Screen Space Ambient Occlusion 屏幕空间环境遮蔽
计算出一个线性版的depth-buffer ,然后使用它来创建SSAO。
先是创建一个噪声版(Noisy),然后连续使用两次深度感知的模糊(Blurred水平和垂直方向)来平滑结果。
所有的这些都是在一半的原始分辨率下进行的以提高性能。


G-Buffer Combination
最后,合并所有生成的buffer!
在 pixel shader 中从不同的buffer获取数据,并计算出在HDR中Pixel最后的着色值。在这次举例的夜景里,光源和他们的irradiance也一样会加入到上面的场景里。



这就很有条理了,虽然我们仍然缺少海洋,天空还有透明的物体,但首先:麦克的表现还需要加强。
Subsurface Scattering 次级表面散射


麦克的皮肤着色稍微有些不同,脸上有很暗的地方,就像身体是用厚塑料做的。
这也就是为什么要执行SSS(Subsurface Scattering),来模拟光在皮肤里的传播。看看他的耳朵和嘴唇,在SSS pass后,光会使得他们有血色,给予了真实世界中应该产生的正确红色。
为什么SSS只对麦克起作用?首先只有他的轮廓被提取了出来。这可能要得益于之前生成的stencil buffer:所有麦克的Pixel都有一个 0x89的值,那么当我们获取到麦克的Pixel,我们需要让SSS只作用在皮肤上,而不是衣服。
实际当所有的 G-Buffer被合并后,除了着色数据保存为RGB,还有一些数据被写入到alpha通道。更精确来说, irradiance map 和 specular map 的alpha通道被用来创建二进制Mask:Pixel属于麦克和一些植物的在Alpha通道中设置为1。其他的Pixel像是服装,Alpha通道的值是0。
这样通过提供的输入到合并的G-Buffer的Target以及depth-stencil buffer,SSS得以被应用。
你可能认为这个只是一个巧妙和局部的改进。虽说如此,但不要忘记在游戏时,我们作为人类会本能的倾向看向角色的脸,脸部任何的渲染改进,对深入体验都是一个很大的成功。游戏中,SSS被应用到你的角色和NPC上。
Water 水
这个例子里没有太多的水,我们在后面会介绍海洋和各处的游泳池。
GTA V中水的渲染包括反射(reflection)和折射(refraction)。
先前创建的对数Z-buffer 用来生成它第2个版本:一半分辨率的线性的Z-buffer。
海洋和水池被依次的绘制,以MRT模式一次输出到多个target上。


Water Diffuse map: 水的固有颜色
Water Opacity map: Red通道看起来保存的是一些水的不透明属性(opacity,例如海洋通常是0.102,水池是0.129)。Green通道保存的水面Pixel的深度(深的Pixel代表更加不透明的水,颜色受Diffuse map影响硬大,而浅水的Pixel几乎是透明的)。
要注意的是,所有的水池都是无条件的被渲染,即便是他们被场景中其他的Mesh所遮挡,也都会显示在Red通道里。而Green通道中,值有可见的Pixel会被计算,只有“水”的像素会计算到最终的图像里。
现在我们可以合并之前创建的buffer来生成refraction map:

在refraction map中,水池中注满了水(水越深越蓝),caustic效果也被加入了。
现在,进行水的最后渲染:再一次的顺序渲染海面和水池的网格,但这次把反射和折射合并,通过一些bump map来扰乱水面的法线。




Atmosphere 大气

light-shaft map,也被叫做“volumetric shadow”:它的作用是让大气或雾的那些不被太阳直接照射的部分变暗。
这个map以一半的分辨率生成,通过ray-marching 每个pixel,并与太阳的shadow map中值做对比。获得到有噪声的结果后,再对缓冲最模糊
接下来我们在场景里加入雾的效果:通过雾可以很方便的隐藏远处低多边形建筑细节上的缺陷。这个pass读取 light-shaft map和 depth-buffer来输出雾的信息。
然后是渲染天空和云彩:




天空实际是一个draw call渲染的:使用的mesh是一个巨大的圆顶覆盖了整个场景。
这个步骤中加入一些texture做成Perlin noise。

云的渲染也是相同的方法,一个巨大的mesh,这里是环的形状,在地平线上渲染。使用了一张normal map 和 density map来渲染云彩:这是一张巨大的2048x512的Texture的,而且是无缝的(左边和右边循环)、


Transparent Objects
这一步渲染场景中所有的透明物体对象,眼镜,挡风玻璃,飞散的灰尘颗粒等等。


全部透明物体的绘制只用了11个draw-call,粒子大量使用了instancing。
Dithering Smoothing
还记得前面我们顺便提到的在Diffuse map中的一些树木是dither的吧?
这次我们来修复这些缺陷:使用Pixel Shader执行的后处理效果,读取原始的颜色缓冲以及Diffuse map中的alpha通道的信息,就可以得知是那些pixel是dither的。每个pixel,可以对周围的两个pixel做采样,计算出最后“光滑”的颜色值。


这个巧妙的方法,有助于减少前面的计算量和填充率,现在只需要一个pass就可以“修复”图像:它的处理成本是恒定的,不收场景中几何体数量的影响。不过这个Filter并不完美,在PS3和PC上我还是注意到屏幕上有一些棋盘格的图案,有些情况Filter并不能处理。
Tone Mapping and Bloom
我们之前渲染的图像一直保存在HDR格式,每个RGB通道保存为1个16bit的浮点。这样就光照强度就可以有巨大的变化。但显示器并不能显示这种高范围的值,只能输出每个通道8bit的RGB颜色。
Tone Mapping用于把这些颜色值从HDR转换到LDR空间。这里有几种函数把一个范围映射到另一个范围。经典并广泛使用的方法就是Reinhard,实际上也是我前面用来生成所有截图的方法,它给出的结果很接近游戏最终的渲染。
但GTA V真的是使用Reinhard么?这里我们还是逆向分析一些shader的字节码:
// Suppose r0 is the HDR color, r1.xyzw is (A, B, C, D) and r2.yz is (E, F)
mul r3.xy, r1.wwww, r2.yzyy // (DE, DF)
mul r0.w, r1.y, r1.z // BC
[...]
div r1.w, r2.y, r2.z // E/F
[...]
mad r2.xyz, r1.xxxx, r0.xyzx, r0.wwww // Ax+BC
mad r2.xyz, r0.xyzx, r2.xyzx, r3.xxxx // x(Ax+BC)+DE
mad r3.xzw, r1.xxxx, r0.xxyz, r1.yyyy // Ax+B
mad r0.xyz, r0.xyzx, r3.xzwx, r3.yyyy // x(Ax+B)+ DF
div r0.xyz, r2.xyzx, r0.xyzx // (x(Ax+BC)+DE) / (x(Ax+B)+DF)
add r0.xyz, -r1.wwww, r0.xyzx // (x(Ax+BC)+DE) / (x(Ax+B)+DF) - (E/F)
(x(Ax+BC)+DE) / (x(Ax+B)+DF) - (E/F) 是在 http://filmicgames.com/archives/75 中出现的典型的方程式,看来GTA V里使用的不是Reinhard,而是神秘海域2中的方法,这样不会让黑色区域失去饱和度。

float A = 0.15;
float B = 0.50;
float C = 0.10;
float D = 0.20;
float E = 0.02;
float F = 0.30;
float W = 11.2;
float3 Uncharted2Tonemap(float3 x)
{
return ((x*(A*x+C*B)+D*E)/(x*(A*x+B)+D*F))-E/F;
}
float4 ps_main( float2 texCoord : TEXCOORD0 ) : COLOR
{
float3 texColor = tex2D(Texture0, texCoord );
texColor *= 16; // Hardcoded Exposure Adjustment
float ExposureBias = 2.0f;
float3 curr = Uncharted2Tonemap(ExposureBias*texColor);
float3 whiteScale = 1.0f/Uncharted2Tonemap(W);
float3 color = curr*whiteScale;
float3 retColor = pow(color,1/2.2);
return float4(retColor,1);
}
转换到LDR的处理流程:
将HDR buffer降采样到1/4的分辨率
使用compute shader计算buffer平均的亮度(luminance),把结果输出到一张1x1的texture。
计算新的曝光,用来控制场景的明暗
使用bright-pass filter,把亮度值高于一定阈值(由曝光值来决定)的pixel提取出来。
场景中只有少数的pixel被filter保留了下来:比如车上有着强烈反射亮度的斑点。
把这个brightness buffer反复的减少尺寸并按原尺寸的1/16来做模糊,然后再upscale几次直到原尺寸的一半为止。
把这个bloom加入到原始的HDR pixel,再使用神秘海域2的tone-map操作,把颜色转化到LDR,同时运用伽马校正( gamma correction ),从线性空间转化到sRGB空间。


最终的结果很大程度上取决于曝光值,下面是说明这个参数的图例:

曝光实际是在帧与帧之间慢慢演变的,不会有突然的变化。
这是为了模拟人眼的行为:游戏中你是否注意到,当在黑暗的隧道中驾车,突然离开隧道照射在阳光下时,所有的环境在几帧里看起来会非常亮?然后再逐渐的从"耀眼"恢复到"正常",同时曝光也调整到一个新的值。GTA V甚至考虑到给予的“明亮”到“黑暗”的曝光适应,比“黑暗”到"明亮"更快,就像人眼的行为一样。
Anti-Aliasing and Lens Distortion
如果anti-aliased(反走样)的方法使用的是FXAA,它是用来平滑网格的锯齿边缘。然后,为了模拟真实相机,使用一个简单的pixel Shader在图像上执行 lens-distortion。它不光是扭曲图像,也在帧的边缘稍微加入了色差,通过Red通道的比Green和Blue更稍加扭曲来实现。


UI
最后提及的是:UI,这里只包含了屏幕左上角的小地图。地图实际上是划分为若干个正方形的Tile,引擎只绘制显示在屏幕中的Tile。每个Tile都是通过一个draw call来绘制的。我把这些Tile上色,以方便了解结构。

Scissor Test 允许只渲染左下角,并抛弃外面的内容。所有的道路实际上是矢量的(见上面截图的线框),可以作为mesh渲染并放大到任意的等级。
然后小地图绘制到主图像缓冲,把一些小的图标和部件添加在顶部。
所有这些使用了4155个draw calls,包含了1113张texture和88张ender target。



 浙公网安备 33010602011771号
浙公网安备 33010602011771号