09. 算子(索贝尔、沙尔、拉普拉斯算子)
1. 索贝尔(sobel)算子
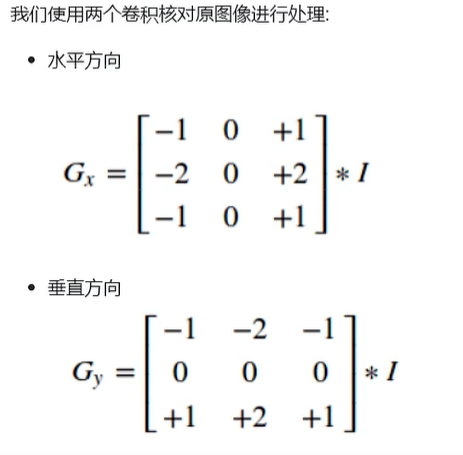
前面的各种滤波,可以视为低通滤波,后面的各种算子可以视为高通滤波,区别:前面的滤波都是降噪的,算子都是来找图像边界、边缘的。索贝尔算子模拟一阶求导,倒数越大的地方说明变换越剧烈,越有可能是边缘。
Sobel(src, ddepth, dx, dy[, dst[, ksize[, scale[, delta[, borderType]]]]])
- ddepth 一般写-1,如果使用cv的写法的话,就是cv2.CV_64F
- dx 设置为1,表示求X方向的梯度
- ksize 是一个数字
- sobel算子必须分开计算x,y轴,不然的话效果很差
import cv2
import numpy as np
img = cv2.imread('./bg.jpg')
dx = cv2.Sobel(img, cv2.CV_64F, dx=1, dy=0, ksize=3)
# 计算y轴方向的梯度,只有水平方向的边缘
dy = cv2.Sobel(img, cv2.CV_64F, dx=0, dy=1, ksize=3)
# dst = cv2.add(dx, dy) 或以下写法
dst = cv2.addWeighted(dx, 0.5, dy, 0.5, gamma=0)
import cv2
import numpy as np
# 卷积
bg = cv2.imread('images/pau3W8ytsv.jpg')
print(bg.shape)
cv2.namedWindow('image', cv2.WINDOW_NORMAL)
cv2.resizeWindow('image', 800, 375)
# dx = cv2.Sobel(bg, -1, dx=1, dy=0, ksize=3)
# dy = cv2.Sobel(bg, -1, dx=0, dy=1, ksize=3)
# 这种写法和上面的写法是一样的,这些算子,就是通过不同的卷积核来实现的
kx = np.array([[-1, 0, 1], [-2, 0, 2], [-1, 0, 1]], np.float32)
ky = np.array([[-1, -2, -1], [0, 0, 0], [1, 2, 1]], np.float32)
dx = cv2.filter2D(bg, -1, kx)
dy = cv2.filter2D(bg, -1, ky)
print(dx.shape, dx.dtype)
print(dy.shape, dy.dtype)
dst = cv2.add(dx, dy)
cv2.imshow('image', bg)
cv2.imshow('dst', dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
2. 沙尔(Scharr)算子
Scharr(src, ddepth, dx, dy[, dst[, scale[, delta[, borderType]]]])
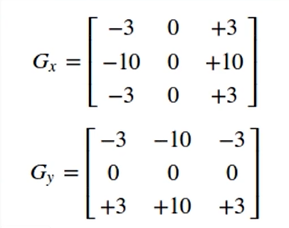
- 当内核大小为3时,以上Sobel内核可能产生比较明显的误差,毕竟Sobel算子只是求取了倒数的近似值,为解决这一问题,提供了沙尔函数,但该函数仅作用于大小为3的内核。该函数的运算与Sobel函数一样快,但结果却更加精确
- Scharr算子核Sobel很类似,只不过使用不同的kernel值,放大了像素变换的情况
![image]()
- Scharr算子只支持3*3的kernel,所以没有了kernel参数了;
- Scharr算子只能求x方向或y方向的边缘;
- Sobel算子的ksize设置为-1就是Scharr算子;
- Scharr擅长寻找细小的边缘,一般用的较少;
3. 拉普拉斯算子
原理:在一阶导数上,在求导,二阶导数为0,利用这一特性去寻找图像的边缘

Laplacian(src, ddpth[, dst[, ksize[, scale[, delta[, borderType]]]]])- ksize 是一个数字

 浙公网安备 33010602011771号
浙公网安备 33010602011771号