数字图像处理
第七章 图像分割
一、概述
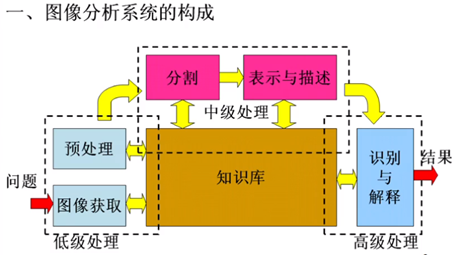
图像分析主要包括以下几部分内容:
(1) 把图像分割成不同的区域,或把不同目标分开(分割)。
(2) 找出各个区域的特征(特征提取)。
(3) 识别图像中的内容,或对图像进行分类(识别与分类)。
(4) 给出结论(描述、分类或其他的结论)。
例、苹果筛选系统:传送带自动传送,自动分类(大小,好坏)。
在传送带上方安装数字摄像机,并利用计算机实现分类。
1、 将苹果从背景中分割出来;
2、 计算两个特征:直径和颜色;
3、 根据计算结果,对目标进行分类;
4、 给出苹果评价结论。
图像分割是在图像特征提取之前的工作,其分割结果的好坏直接影响图像分析的结果。
图像分割的方法很多,但没有一种方法可以很好的分割任意一幅图像。不同类的图像有不同的分割算法,或者有时需要几种分割方法结合使用。
图像分割困难:
*图像数据的模糊和噪声的干扰。
*图像分割需要目标的特征值,而特征值又往往是分割之后才可以计算得到,因此这是一个矛盾的问题。(解决办法:先验知识,样本等)。
*分割结果的好坏没有统一的评价标准。(标准图像,或者计算统计误差)。
图像分割概念:把图像空间按照一定的要求分成一些“有意义”的区域的技术称为图像分割。
过程:
——把图像分解成构成它的部件和对象的过程;
——有选择性地定位感兴趣对象在图像中的位置和范围;
基本原理:
图像分割是按照某些特性(如灰度级,频谱,纹理等)将图像划分成一些区域,在这些区域内其特性是相同的或者说是均匀的,两个相邻区域彼此特性则是不同的,其间存在着边缘或边界。
两个基本特性:
1、 不连续性——区域之间;
2、 相似性——区域内部。
基本原理:基于不连续性和相似性。
不连续性:不同区域交界、边缘处像素灰度值具有不连续突变性。
先找到区域交界处的点、线(宽度为1)、边(不定宽度),再确定区域;
——边界分割法
除了进行边缘检测外,还需要将边缘线段连接、“组装”成为边界,然后依据边界对图像进行分割。
相似性:同一区域内像素一般具有灰度相似性,据此找到灰度值相似的区域;区域的外轮廓就是对象的边缘。
依据一定的准则将图像分割为不同的区域(目标、背景各自具有各自独特的、相似的亮度信息)。
-门限分割法
-面向区域的分割
-模板匹配法分割
-数学形态学图像分割
-……
基本思路:
精确的分割决定后续图像分析的成败。
异常图像的分割是图像处理中最困难的任务之一,提高分割的稳定性-----非常重要,同时也比较困难;
- 控制光照环境(光源)和采用合适传感器(红外),有助于正确、有效地分割。
a) 北京环境,路面、天空
- 从简到难,逐级分割;
a) 分割矩形区域,定位牌照,定位文字;
- 把焦点放在增强感兴趣对象,缩小不感兴趣图像成分的干扰上。
a) 感兴趣的对象:汽车牌照
b) 不感兴趣的对象:非矩形区域
图像分割的本质:将图像像素按照不同特性进行分类的过程。
二、灰度阈值分割
图像阈值(门限)分割具有直观和易于实现的特点,在图像分割应用中占有重要地位。
许多情况,图像f(x,y),由亮对象和暗背景组成。图像时由具有不同灰度级的两类区域组成,如文字和纸张。
特点:直方图具有两个不同灰度级范围的尖峰,分别对应图像中的对象和背景。故可选一个门限,将两个峰分开。
基本的阈值分割:
1、 单一全局门限
最简单的门限处理技术。适用于目标和背景的灰度差较大,直方图有明显谷底的情况。
对像素逐个扫描,按其灰度级大于或小于门限T,将像素相应地标记为对象或背景,实现图像分割。
门限的确定是以直方图视觉检测为基础,通过试探决定,
能否成功,完全取决于图像的直方图能否被很好的分割。
自动计算门限T的算法:
a) 选择一个T的初始估计值,定义参数▲T;
b) T分割图像得到两组像素,
G1={f(x,y)|f(x,y)>T},G2={f(x,y)|f(x,y)<T};
c) 对区域G1、G2中所有像素分别计算平均灰度值,u1和u2;
d) 计算新的门限值:T=(u1+u2)/2;
e) 重复2~4,直到逐次迭代的T值之差小于▲T;
若图像背景和对象的面积相近,T初始值就是图像的平均灰度值。
若对象面积大于背景面积。对象象素组在直方图中占据主导地位,平均灰度值不是一个好的初值。反之亦然。
此时,T值更适合的初值是诸如灰度值的中间值一类的初值。
▲T用于判别是否终止计算,对分割速度、分割精度均有影响。
全局门限处理能够在高度可控环境中得到成功应用,如工业检测领域。
2、 双全局门限
物体和背景的灰度级出现部分重叠,选双门限。
选择门限T1,T2。
f(x,y)<T1, 背景点;
T1<f(x,y)<T2, 对象1点;
T2<f(x,y), 对象2点。
门限化处理提取边界,中间灰度级(或灰度级突变处)则是在物体和背景之间的边界上出现的。把中间灰度级变为1,其他灰度级变换为0。
3、 基本自适应门限
不均匀照射,亮度不均匀图像,单一全局门限无法有效分割。一种简单的改进方法就是将图像进一步分割为子图像。然后对子图像使用不同的门限进行分割。
这类算法的时间复杂度和空间复杂度比较大,但是抗噪声的能力比较强,有较好的分割效果。
自适应阈值选取方法的关键在于如何对图像进行分块处理。
三、基于边界的图像分割
基于边界的图像分割技术是基于灰度不连续性进行的分割方法。
1、 边缘检测
利用梯度、差分、拉普拉斯算子及各种高通滤波处理方法进行图像锐化处理,增强图像边缘。
再进行一次门限化的处理,便可以将边缘增强的方法用于边缘检测。
结论:
l Robert算子是2x2算子,对边缘比较陡峭的低噪声图像效果较好。
l 3x3的算子对灰度渐变和噪声较多的图像处理较好。
l 使用两个模板取最大的方法,对边缘比较敏感;
l 取两个模板的平方和的开方的方法,可以获得与真实梯度更接近的响应。
2、 边缘连接
由于噪声的原因,边界的特征很少能够被完整地描述,在亮度不一致的地方会中断。
典型的边缘检测算法后面总要跟随着连接过程和其它边界检测过程,用来归整边像素,成为有意义的边界。
a) 局部处理法
b) Hough变换
l 局部处理法
原理:对做过边检测的图像的每个点(x,y)的特性进行分析,在一个小的邻域(3x3或5x5)中进行分析,所有相似的点被连接,形成一个享有共同特性像素的边界。
用比较梯度算子的响应强度和梯度方向确定两个点是否同属一条边界。
——通过比较梯度,确定两个点的连接性:
对于点(x’,y’),判断其是否与邻域内的点(x,y)相似,
当:
|▽f(x,y) - ▽f(x’,y’)|≤T
其中T是一个非负的阈值。
——比较梯度向量的方向角:
对于点(x’,y’),判断其是否与邻域内的点(x,y)的方向角相似,
当:
|a(x,y) - a(x’,y’)|<A
其中A是一个角度阈值。
如果梯度值和方向角都是相似的,则点(x’,y’),与边界点(x,y)是连接的。
-局部连接算法描述:
a) 设定A、T的阈值大小,确定邻域的大小
b) 对图像上每个像素的邻域进行分析,判断是否需要连接。
c) 记录象素连接的情况,另开一个空间,给不同的边以不同的标记。
d) 最后,删除孤立线段,连接断开的线段。
-边缘跟踪:将检测的边缘点连接成线,形成有意义的边界。
1) 光栅跟踪
采用电视光栅行扫描顺序,结合门限检测,对遇到的像素进行分析,从而确定是否为边缘的跟踪方法。
2)全向跟踪
全向跟踪就是跟踪方向可以是任意方向,并且有足够大的跟踪距离的跟踪方法。它是改变了邻域定义和跟踪准则的一种光栅跟踪法。
l 邻域:选取适当的、能进行全向跟踪的邻域定义,如八邻域;方向,距离
l 跟踪准则:选择一个适当的跟踪准则,如灰度阈值、对比度和空间距离等。
Hough变换
在找出边界点集之后,需要连接,形成完整的边界图形描述。
在预先知道区域形状的条件下,利用Hough变换可以方便地得到边界曲线而将不连接的像素点连接起来。
Hough变换的基本思想:对边界上的n个点的点集,找出公共的点集和直线方程。
四、基于区域的图像分割
*门限分割利用了像素灰度分布特性;
*边界分割考虑了区域边界的灰度不连续性;
*基于区域的分割直接寻找区域为基础的分割技术。
基于区域的图像分割:
1、 区域生长法
根据一定准则将像素或子区域聚合成更大的区域的过程。
基本方法:以一组“种子”点开始,将与种子性质相似(如灰度级等)的邻域像素附加到生长区域的每个种子上。
种子产生方法:
l 通常根据所解决问题的性质选择一个或多个起点。
l 如无先验信息,则对每个像素计算相同的特性集,特性集在生长过程中用于将像素归属于某个区域。
l 如果这些计算的结果呈现了不同簇的值,则簇中心附近的像素可以作为种子。
终止规则:
如果没有像素满足加入某个区域的条件时,区域生长停止。
-先验知识;
-先验模型。
相似度准则
l 灰度级准则
l 纹理准则
l 颜色准则
区域生长的一个关键是选择合适的生长准则。不同的生长准则会影响区域生长的过程、结果。
生长准则可根据不同的原则指定,大部分区域生长准则使用图像的局部特性。
1) 基于区域灰度差:以像素为基本单位进行操作。
a) 对图像进行逐行扫描,找出尚未归属的像素;
b) 以该像素为中心检查他的邻域像素,即将邻域中的像素逐个与它比较,如果灰度差小于预先确定的阈值,就将他们合并;
c) 以新合并的像素为中心,返回到步骤2,检查新像素的邻域,直到区域不能进一步扩张。
d) 返回步骤1,继续扫描,直到不能发现没有归属的像素,则结束整个生长过程。
改进方法:
-求出所有邻域的平均灰度差,并合并具有最小灰度差的邻域区域;
-考虑区域生长的“历史”;
-生长区域形状等等。
2)基于区域内灰度分布统计性质:考虑以灰度分布相似性作为生长准则来决定区域的合并。
具体步骤:
a) 把图像分成互不重叠的小区域;
b) 比较邻接区域的灰度直方图,根据灰度分布的相似特性进行区域合并;
c) 设定终止准则,通过反复进行步骤2中的操作将各个区域依次合并,直到终止准则满足。
灰度分布的相似性判断标准:(设h1(z),h2(z)分别为两个邻接区域的灰度直方图):
- Max | h1(z) – h2(z) |;
- Σ | h1(z) – h2(z) |;
*如果检测值小于给定的阈值,即将两个区域合并。
*区域的尺寸大小要合适,大小尺寸检测可靠性降低,尺寸太大检测的区域形状不理想。
*第二种方法考虑了所有灰度值,更有优势。
***区域分裂与合并
算法实现:
1) 对图像中灰度级不同的区域,均分为四个子区域;
2) 若相邻的子区域所有像素的灰度级相同,则将其合并;
3) 反复上述两个步骤,直至不再有新的分裂与合并为止。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号