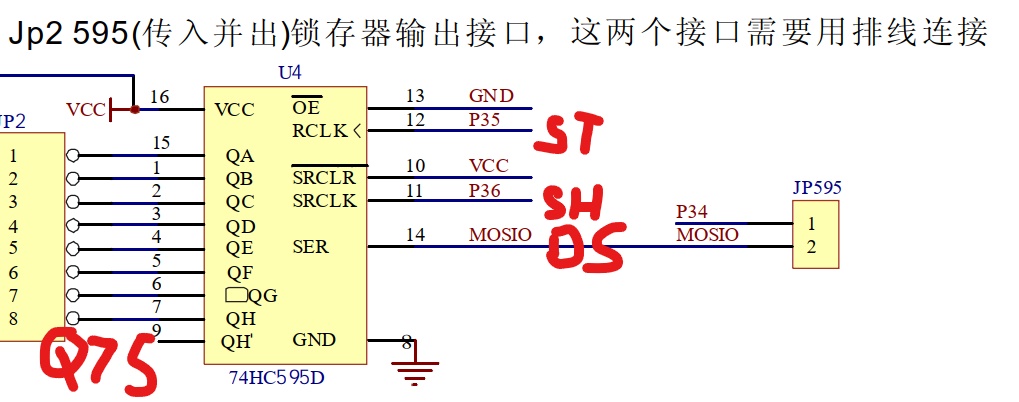
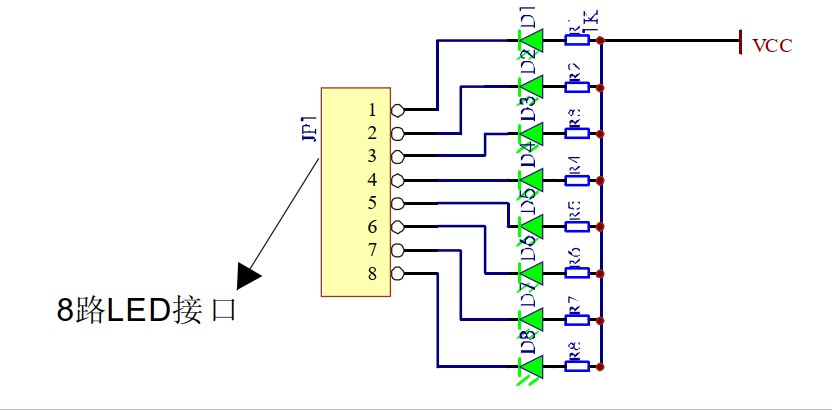
逐个点亮LED灯,再逐个熄灭LED灯的跑马灯程序---基于74HC595移位锁存器,程序框架用switch语句
/*
当单片机上电时,会发现LED灯出现乱序情况,而且这种情况是无法改变的。这是因为正式程序运行的时候,74HC595还在复位状态,没有响应单片机的锁存。
软件解决办法:所以这之前可以加一小段延时,保证程序运行的时候,74HC595不在复位状态。
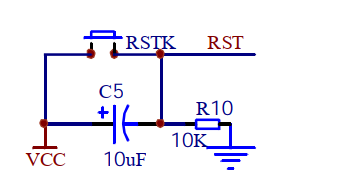
硬件解决办法:74HC595可以用类似单片机的上电复位电路给595的/SCLR(10脚)引脚上拉电阻,下拉电容。上电时,电容还没有充电,引脚低电平,过一段时间之后电容点压慢慢升高至高电平,芯片正常工作。注意复位时间不要比单片机的上电复位时间长太多,要不然程序开始运行的时候,595还在复位状态,没有响应数据的锁存复位键(我的74HC595芯片的SRCLR(10)引脚直接接的VCC,所以会出现乱码情况,不可以手动复位)。
*/
#include "REG52.H"
#define const_time_level_01_08 200 //第1个至第8个LED跑马灯的速度延时时间
void initial_myself();
void initial_peripheral();
void delay_short(unsigned int uiDelayShort);
void delay_long(unsigned int uiDelayLong);
void led_flicker_01_08(); //第1个至第8个LED跑马灯程序,逐个亮,逐个灭
void hc595_drive(unsigned char ucLedStatusTemp08_01);
void led_updata(); //LED更新函数
void T0_time(); //定时中断函数
#define const_time_level_01_08 200 //第1个至第8个LED跑马灯的速度延时时间
void initial_myself();
void initial_peripheral();
void delay_short(unsigned int uiDelayShort);
void delay_long(unsigned int uiDelayLong);
void led_flicker_01_08(); //第1个至第8个LED跑马灯程序,逐个亮,逐个灭
void hc595_drive(unsigned char ucLedStatusTemp08_01);
void led_updata(); //LED更新函数
void T0_time(); //定时中断函数
sbit hc595_sh_dr=P3^6; //上升沿时,数据寄存器数据移位
sbit hc595_st_dr=P3^5; //上升沿时移位寄存器的数据进入数据寄存器,下降沿时数据不变。当移位结束后,会产生一个正脉冲,用于更新显示数据。
sbit hc595_ds_dr=P3^4; //串行数据输入端,级联的话接上一级的Q7
sbit hc595_st_dr=P3^5; //上升沿时移位寄存器的数据进入数据寄存器,下降沿时数据不变。当移位结束后,会产生一个正脉冲,用于更新显示数据。
sbit hc595_ds_dr=P3^4; //串行数据输入端,级联的话接上一级的Q7
unsigned char ucLed_dr1=0; //代表8个灯的亮灭状态,0灭,1亮
unsigned char ucLed_dr2=0;
unsigned char ucLed_dr3=0;
unsigned char ucLed_dr4=0;
unsigned char ucLed_dr5=0;
unsigned char ucLed_dr6=0;
unsigned char ucLed_dr7=0;
unsigned char ucLed_dr8=0;
unsigned char ucLed_dr2=0;
unsigned char ucLed_dr3=0;
unsigned char ucLed_dr4=0;
unsigned char ucLed_dr5=0;
unsigned char ucLed_dr6=0;
unsigned char ucLed_dr7=0;
unsigned char ucLed_dr8=0;
unsigned char ucLed_updata=0; //刷新变量。每次更改LED灯的状态都要更新一次
unsigned char ucLedStep_01_08=0; //第1个至第8个LED跑马灯的步骤变量
unsigned int uiTimeCnt_01_08=0; //第1个至第8个LED跑马灯的统计定时中断次数的延时计数器
unsigned char ucLedStatus08_01=0; //代表底层74HC595输出状态的中间变量
unsigned char ucLedStep_01_08=0; //第1个至第8个LED跑马灯的步骤变量
unsigned int uiTimeCnt_01_08=0; //第1个至第8个LED跑马灯的统计定时中断次数的延时计数器
unsigned char ucLedStatus08_01=0; //代表底层74HC595输出状态的中间变量
void main()
{
initial_myself();
delay_long(100);
initial_peripheral();
while(1)
{
led_flicker_01_08(); //第1个至第8个LED跑马灯程序,逐个亮,逐个灭
led_updata(); //LED更新函数
}
}
{
initial_myself();
delay_long(100);
initial_peripheral();
while(1)
{
led_flicker_01_08(); //第1个至第8个LED跑马灯程序,逐个亮,逐个灭
led_updata(); //LED更新函数
}
}
void led_updata() //LED更新函数
{
if(ucLed_updata==1)
{
ucLed_updata=0; //及时清零,避免一直更新
if(ucLed_dr1==1)
ucLedStatus08_01=ucLedStatus08_01&0xfe; //确保第1位为0 亮
else
ucLedStatus08_01=ucLedStatus08_01|0xff; //确保第1位为1 灭
if(ucLed_dr2==1)
ucLedStatus08_01=ucLedStatus08_01&0xfc;
else
ucLedStatus08_01=ucLedStatus08_01|0xfe;
if(ucLed_dr3==1)
ucLedStatus08_01=ucLedStatus08_01&0xf8;
else
ucLedStatus08_01=ucLedStatus08_01|0xfc;
if(ucLed_dr4==1)
ucLedStatus08_01=ucLedStatus08_01&0xf0;
else
ucLedStatus08_01=ucLedStatus08_01|0xf8;
if(ucLed_dr5==1)
ucLedStatus08_01=ucLedStatus08_01&0xe0;
else
ucLedStatus08_01=ucLedStatus08_01|0xf0;
if(ucLed_dr6==1)
ucLedStatus08_01=ucLedStatus08_01&0xc0;
else
ucLedStatus08_01=ucLedStatus08_01|0xe0;
if(ucLed_dr7==1)
ucLedStatus08_01=ucLedStatus08_01&0x80;
else
ucLedStatus08_01=ucLedStatus08_01|0xc0;
if(ucLed_dr8==1)
ucLedStatus08_01=ucLedStatus08_01&0x00;
else
ucLedStatus08_01=ucLedStatus08_01|0x80;
hc595_drive(ucLedStatus08_01); //74HC595底层驱动程序
}
}
{
if(ucLed_updata==1)
{
ucLed_updata=0; //及时清零,避免一直更新
if(ucLed_dr1==1)
ucLedStatus08_01=ucLedStatus08_01&0xfe; //确保第1位为0 亮
else
ucLedStatus08_01=ucLedStatus08_01|0xff; //确保第1位为1 灭
if(ucLed_dr2==1)
ucLedStatus08_01=ucLedStatus08_01&0xfc;
else
ucLedStatus08_01=ucLedStatus08_01|0xfe;
if(ucLed_dr3==1)
ucLedStatus08_01=ucLedStatus08_01&0xf8;
else
ucLedStatus08_01=ucLedStatus08_01|0xfc;
if(ucLed_dr4==1)
ucLedStatus08_01=ucLedStatus08_01&0xf0;
else
ucLedStatus08_01=ucLedStatus08_01|0xf8;
if(ucLed_dr5==1)
ucLedStatus08_01=ucLedStatus08_01&0xe0;
else
ucLedStatus08_01=ucLedStatus08_01|0xf0;
if(ucLed_dr6==1)
ucLedStatus08_01=ucLedStatus08_01&0xc0;
else
ucLedStatus08_01=ucLedStatus08_01|0xe0;
if(ucLed_dr7==1)
ucLedStatus08_01=ucLedStatus08_01&0x80;
else
ucLedStatus08_01=ucLedStatus08_01|0xc0;
if(ucLed_dr8==1)
ucLedStatus08_01=ucLedStatus08_01&0x00;
else
ucLedStatus08_01=ucLedStatus08_01|0x80;
hc595_drive(ucLedStatus08_01); //74HC595底层驱动程序
}
}
void hc595_drive(unsigned char ucLedStatusTemp08_01)//1-8位
{
unsigned char i;
unsigned char ucTempData;
hc595_sh_dr=0;
hc595_st_dr=0;
ucTempData=ucLedStatusTemp08_01; //送8位
for(i=0;i<8;i++)
{
if(ucTempData>=0x80) //更新一次数据,移一次位
hc595_ds_dr=1;//串行数据输入,如果是多片联级的话,更新一次,输入一次数据。(我的单片机只用了一个74HC595芯片)
else
hc595_ds_dr=0;
hc595_sh_dr=0;
delay_short(15);
hc595_sh_dr=1;//SH引脚的上升沿把数据送入寄存器
delay_short(15);
ucTempData=ucTempData<<1;//左移一位
}
hc595_st_dr=0;
delay_short(15);
hc595_st_dr=1; //ST引脚负责把寄存器的数据更新输出到74HC595的输出引脚上并且锁存起来。上升沿时更新显示数据。
delay_short(15);
hc595_sh_dr=0; //拉低,抗干扰就增强
hc595_st_dr=0;
hc595_ds_dr=0;
}
{
unsigned char i;
unsigned char ucTempData;
hc595_sh_dr=0;
hc595_st_dr=0;
ucTempData=ucLedStatusTemp08_01; //送8位
for(i=0;i<8;i++)
{
if(ucTempData>=0x80) //更新一次数据,移一次位
hc595_ds_dr=1;//串行数据输入,如果是多片联级的话,更新一次,输入一次数据。(我的单片机只用了一个74HC595芯片)
else
hc595_ds_dr=0;
hc595_sh_dr=0;
delay_short(15);
hc595_sh_dr=1;//SH引脚的上升沿把数据送入寄存器
delay_short(15);
ucTempData=ucTempData<<1;//左移一位
}
hc595_st_dr=0;
delay_short(15);
hc595_st_dr=1; //ST引脚负责把寄存器的数据更新输出到74HC595的输出引脚上并且锁存起来。上升沿时更新显示数据。
delay_short(15);
hc595_sh_dr=0; //拉低,抗干扰就增强
hc595_st_dr=0;
hc595_ds_dr=0;
}
/*switch状态机,进行程序切换*/
void led_flicker_01_08() //第1个至第8个LED跑马灯程序,逐个亮,逐个灭
{
switch(ucLedStep_01_08)
{
case 0:
if(uiTimeCnt_01_08>=const_time_level_01_08) //时间到
{
uiTimeCnt_01_08=0; //时间计数器清零
ucLed_dr1=1; //第1个灯亮
ucLed_updata=1; //更新显示
ucLedStep_01_08=1; //切换到下一个步骤
}
break;
case 1:
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr2=1;
ucLed_updata=1;
ucLedStep_01_08=2;
}
break;
case 2:
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr3=1;
ucLed_updata=1;
ucLedStep_01_08=3;
}
break;
void led_flicker_01_08() //第1个至第8个LED跑马灯程序,逐个亮,逐个灭
{
switch(ucLedStep_01_08)
{
case 0:
if(uiTimeCnt_01_08>=const_time_level_01_08) //时间到
{
uiTimeCnt_01_08=0; //时间计数器清零
ucLed_dr1=1; //第1个灯亮
ucLed_updata=1; //更新显示
ucLedStep_01_08=1; //切换到下一个步骤
}
break;
case 1:
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr2=1;
ucLed_updata=1;
ucLedStep_01_08=2;
}
break;
case 2:
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr3=1;
ucLed_updata=1;
ucLedStep_01_08=3;
}
break;
case 3:
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr4=1;
ucLed_updata=1;
ucLedStep_01_08=4;
}
break;
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr4=1;
ucLed_updata=1;
ucLedStep_01_08=4;
}
break;
case 4:
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr5=1;
ucLed_updata=1;
ucLedStep_01_08=5;
}
break;
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr5=1;
ucLed_updata=1;
ucLedStep_01_08=5;
}
break;
case 5:
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr6=1;
ucLed_updata=1;
ucLedStep_01_08=6;
}
break;
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr6=1;
ucLed_updata=1;
ucLedStep_01_08=6;
}
break;
case 6:
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr7=1;
ucLed_updata=1;
ucLedStep_01_08=7;
}
break;
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr7=1;
ucLed_updata=1;
ucLedStep_01_08=7;
}
break;
case 7:
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr8=1;
ucLed_updata=1;
ucLedStep_01_08=8;
}
break;
case 8:
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0; //时间到
ucLed_dr8=0; //第8个 灭
ucLed_updata=1; //更新显示
ucLedStep_01_08=9; //切换到下一个步骤
}
break;
case 9:
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr7=0;
ucLed_updata=1;
ucLedStep_01_08=10;
}
break;
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr8=1;
ucLed_updata=1;
ucLedStep_01_08=8;
}
break;
case 8:
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0; //时间到
ucLed_dr8=0; //第8个 灭
ucLed_updata=1; //更新显示
ucLedStep_01_08=9; //切换到下一个步骤
}
break;
case 9:
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr7=0;
ucLed_updata=1;
ucLedStep_01_08=10;
}
break;
case 10:
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr6=0;
ucLed_updata=1;
ucLedStep_01_08=11;
}
break;
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr6=0;
ucLed_updata=1;
ucLedStep_01_08=11;
}
break;
case 11:
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr5=0;
ucLed_updata=1;
ucLedStep_01_08=12;
}
break;
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr5=0;
ucLed_updata=1;
ucLedStep_01_08=12;
}
break;
case 12:
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr4=0;
ucLed_updata=1;
ucLedStep_01_08=13;
}
break;
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr4=0;
ucLed_updata=1;
ucLedStep_01_08=13;
}
break;
case 13:
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr3=0;
ucLed_updata=1;
ucLedStep_01_08=14;
}
break;
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr3=0;
ucLed_updata=1;
ucLedStep_01_08=14;
}
break;
case 14:
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr2=0;
ucLed_updata=1;
ucLedStep_01_08=15;
}
break;
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr2=0;
ucLed_updata=1;
ucLedStep_01_08=15;
}
break;
case 15:
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr1=0;
ucLed_updata=1;
ucLedStep_01_08=0;
}
break;
}
}
if(uiTimeCnt_01_08>=const_time_level_01_08)
{
uiTimeCnt_01_08=0;
ucLed_dr1=0;
ucLed_updata=1;
ucLedStep_01_08=0;
}
break;
}
}
void T0_time() interrupt 1
{
TF0=0; //清除中断标志
TR0=0; //关中断
if(uiTimeCnt_01_08<0xffff) //设定这个条件,防止uiTimeCnt超范围
uiTimeCnt_01_08++;
TH0=0xf8; //重装初始值(65535-2000)=63535=0xf82f
TL0=0x2f;
TR0=1; //开中断
}
{
TF0=0; //清除中断标志
TR0=0; //关中断
if(uiTimeCnt_01_08<0xffff) //设定这个条件,防止uiTimeCnt超范围
uiTimeCnt_01_08++;
TH0=0xf8; //重装初始值(65535-2000)=63535=0xf82f
TL0=0x2f;
TR0=1; //开中断
}
void delay_short(unsigned int uiDelayShort)
{
unsigned int i;
for(i=0;i<uiDelayShort;i++)
;
}
{
unsigned int i;
for(i=0;i<uiDelayShort;i++)
;
}
void delay_long(unsigned int uiDelayLong)
{
unsigned int i;
unsigned int j;
for(i=0;i<uiDelayLong;i++)
for(j=0;j<500;j++)
;
}
{
unsigned int i;
unsigned int j;
for(i=0;i<uiDelayLong;i++)
for(j=0;j<500;j++)
;
}
void initial_myself() //第一区 初始化单片机
{
TMOD=0x01; //设置定时器0工作方式为1
TH0=0xf8;
TL0=0x2f;
}
{
TMOD=0x01; //设置定时器0工作方式为1
TH0=0xf8;
TL0=0x2f;
}
void initial_peripheral()
{
EA=1; //开总中断
ET0=1; //允许定时中断
TR0=1; //启动定时中断
}
{
EA=1; //开总中断
ET0=1; //允许定时中断
TR0=1; //启动定时中断
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号