Faster R-CNN
标题:《Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks》
时间:2015
出版源:NIPS 2015
主要链接:
-
github(official, Matlab):https://github.com/ShaoqingRen/faster_rcnn
- github(official, Caffe):https://github.com/rbgirshick/py-faster-rcnn
Fast R-CNN依赖于外部候选区域方法,如选择性搜索。但这些算法在CPU上运行且速度很慢。在测试中,Fast R-CNN需要2.3秒来进行预测,其中2秒用于生成2000个ROI。Faster R-CNN采用与Fast R-CNN相同的设计,只是它用内部深层网络代替了候选区域方法。新的候选区域网络(RPN)在生成ROI时效率更高,并且以每幅图像10毫秒的速度运行。
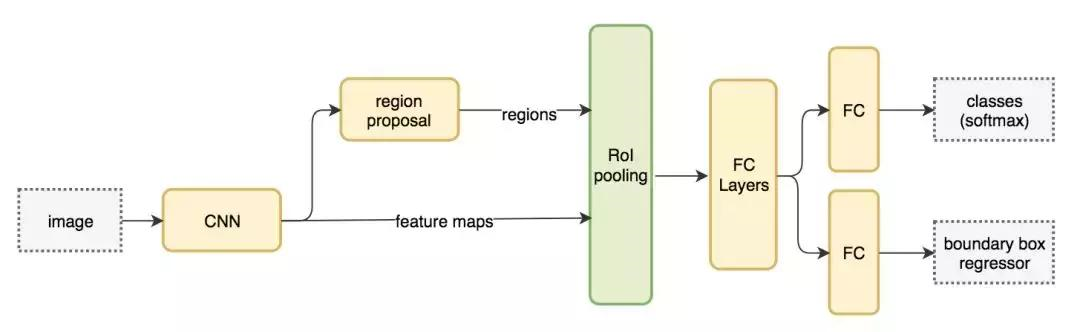 图1
图1
图1 Faster R-CNN的流程图,Faster R-CNN的流程图与Fast R-CNN相同,采用外部候选区域方法代替了内部深层网络。

图2
图2 候选区域网络。候选区域网络(RPN)将第一个卷积网络的输出特征图作为输入。它在特征图上滑动一个3×3的卷积核,以使用卷积网络(如下所示的ZF网络(对alexnet的改造))构建与类别无关的候选区域。其他深度网络(如VGG或ResNet)可用于更全面的特征提取,但这需要以速度为代价。ZF网络最后会输出256个值,它们将馈送到两个独立的全连接层,以预测边界框和两个objectness分数,这两个objectness分数度量了边界框是否包含目标。我们其实可以使用回归器计算单个objectness分数,但为简洁起见,Faster R-CNN使用只有两个类别的分类器:即带有目标的类别和不带有目标的类别。
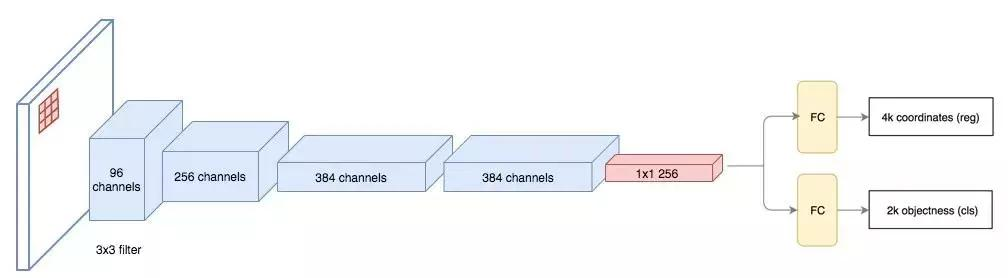
图3
图3 对于特征图中的每一个位置,RPN会做k次预测。因此,RPN将输出4×k个坐标和每个位置上2×k个得分。下图展示了8×8的特征图,且有一个3×3的卷积核执行运算,它最后输出8×8×3个ROI(其中k=3)。下图(右)展示了单个位置的3个候选区域。
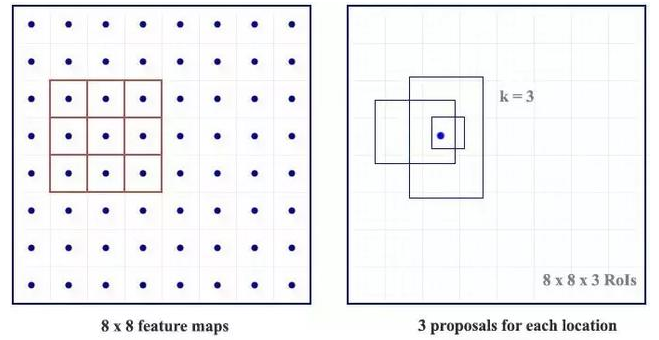
图4
图4 假设最好涵盖不同的形状和大小。因此,Faster R-CNN不会创建随机边界框。相反,它会预测一些与左上角名为锚点的参考框相关的偏移量(如x, y)。我们限制这些偏移量的值,因此我们的猜想仍然类似于锚点。
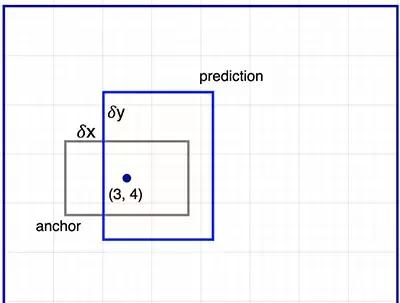
图5
图5 要对每个位置进行k个预测,我们需要以每个位置为中心的k个锚点。每个预测与特定锚点相关联,但不同位置共享相同形状的锚点。

图6
图6 这些锚点是精心挑选的,因此它们是多样的,且覆盖具有不同比例和宽高比的现实目标。这使得我们可以用更好的猜想来指导初始训练,并允许每个预测专门用于特定的形状。该策略使早期训练更加稳定和简便。

图7
图7 Faster R-CNN使用更多的锚点。它部署9个锚点框:3个不同宽高比的3个不同大小的锚点框。每一个位置使用9个锚点,每个位置会生成2×9个objectness分数和4×9个坐标。
转:目标检测

 浙公网安备 33010602011771号
浙公网安备 33010602011771号