

四元数
四元数
定义
最左侧实数称为标量部分,右侧\(ijk\)虚部称为向量vector
用四元数来描述矩阵相乘
\(q_1\cdot q_2 = (\frac{q_1}{\lVert q_1\rVert})\lVert q_1 \rVert\cdot q_2\)
\(q_1\cdot q_2\)会将\(q_2\)的大小拉伸到\(q_1\)的大小(上市括号外的内容),然后施加一个特殊的四维旋转(上式括号内的内容)
四维超球投影到三维空间,在单位球内的是\([-1,1]^4\),超出\([-1,1]^4\)的点投影到了单位球外,延申至无穷远
投影过程可参考二维到一维、三维到二维的球极投影
四元数在三维点上的应用
【四元数和三维转动,可互动的探索式视频(请看链接)】 https://www.bilibili.com/video/BV1Lt411U7og/?share_source=copy_web&vd_source=ac806c24de13bf5f509bf105a8578e24
当想绕某个轴旋转某个角度时,首先用一个单位向量(\(ijk\)经过归一化,三者平方和为\(1\))定义这个轴,对于三维向量,其实部为\(0\),\(xyz\)作为\(ijk\)的系数
之后,若想旋转的角度是\(\theta\),则使用半角\(\theta/2\)的余弦值作为实部,正弦值乘以四元数向量
如:\(q=(\cos(40^{\circ}/2)+\sin(40^{\circ}/2)(0.67i-0.67j-0.33k))\)
如果想对一点\(p\)应用这个旋转,只需\(p'=q\cdot p\cdot q^{-1}\)即可,就能得到旋转后的坐标\(p'\),\(p'\)是一个四元数,其实部为0,\(ijk\)向量系数即为旋转后的三维坐标
为什么是\(q\cdotp\cdot q^{-1}而不是q\cdot p\)?
\(q\)的本质是一个空间变换,旋转变换是其中一环,旋转*缩放=空间变换
四元数有一个性质是可逆的
那么(旋转*缩放)p / 缩放 = 旋转*p?
然而这样做是不行的,因为空间变换\(q\)必定包含旋转和缩放
于是可以用到左右手螺旋定则
\(q\)左乘\(p\)或右乘\(p\),只会影响旋转的方向,不会影响缩放的方向
而\(q\cdot p\)和\(q^{-1}\cdot p\)的异同在于二者旋转一样缩放相反
于是可以通过\(q\cdot p\cdot q^{-1}\),左乘\(q\)和右乘\(q^{-1}\)分别完成半个\(\theta\)角度的旋转,而\(q\)与\(q^{-1}\)又刚好抵消掉了缩放
四元数插值
要在两个四元数之间进行球面线性插值(Spherical Linear Interpolation), Slerp()。球面线性插值可在球面表面大圆的弧线上做匀速率运动,因此对于旋转插值有两个期望的性质
- 旋转插值路径使得扭矩最小化:两个旋转之间的路径是旋转空间中所能得到的最短路径
- 插值有很顶角速度:动画参数\(t\)的变化量和所得旋转的变换了的关系在插值过程中是恒定的,换句话说,在插值范围内,插值速度是恒定的
Shoemake(1985)提出的公式
PBRT中的公式
以一种更直观的方式理解
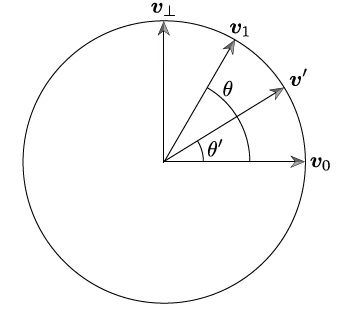
考虑在2D平面下的两个单位圆上的向量\(v_0\)和\(v_1\),二者夹角为\(\theta\),想要计算二者之间角度为\(\theta'\)的插值向量,可以寻找正交于\(v_0\)的向量\(v_\bot\),再应用三角恒等式\(v'=v_0\cos\theta'+v_\bot\sin\theta'\)
那么要计算\(q'\),首先要在四元数空间种计算一个正交坐标系,一个轴为\(q_1\),另一个是于\(q_1\)正交的四元数\(q_\bot\),这样两轴就构成张开\(q_1\)和\(q_2\)的基
可以通过将\(q_2\)投影到\(q_1\),再由\(q_2\)减去这一部分得到\(q_\bot\)
\(q_\bot=q_2-(q_1\cdot q_2)q_1\)
那么插值四元数为\(q'=q_1\cos(\theta t)+\hat q_\bot\sin(\theta t)\)
要注意的点
在插值时应检查两个四元数是否几乎平行
-
二者几乎平行,则按顺序对四元数分量用普通的线性插值以避免数值不稳定
-
否则,按\(q_\bot=q_2-(q_1\cdot q_2)q_1\)
\(q'=q_1\cos(\theta t)+\hat q_\bot\sin(\theta t)\)
插值计算四元数


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
· 【自荐】一款简洁、开源的在线白板工具 Drawnix
· 园子的第一款AI主题卫衣上架——"HELLO! HOW CAN I ASSIST YOU TODAY
· Docker 太简单,K8s 太复杂?w7panel 让容器管理更轻松!