深度学习——LeNet卷积神经网络初探
LeNet--卷积神经网络初探
模型介绍:
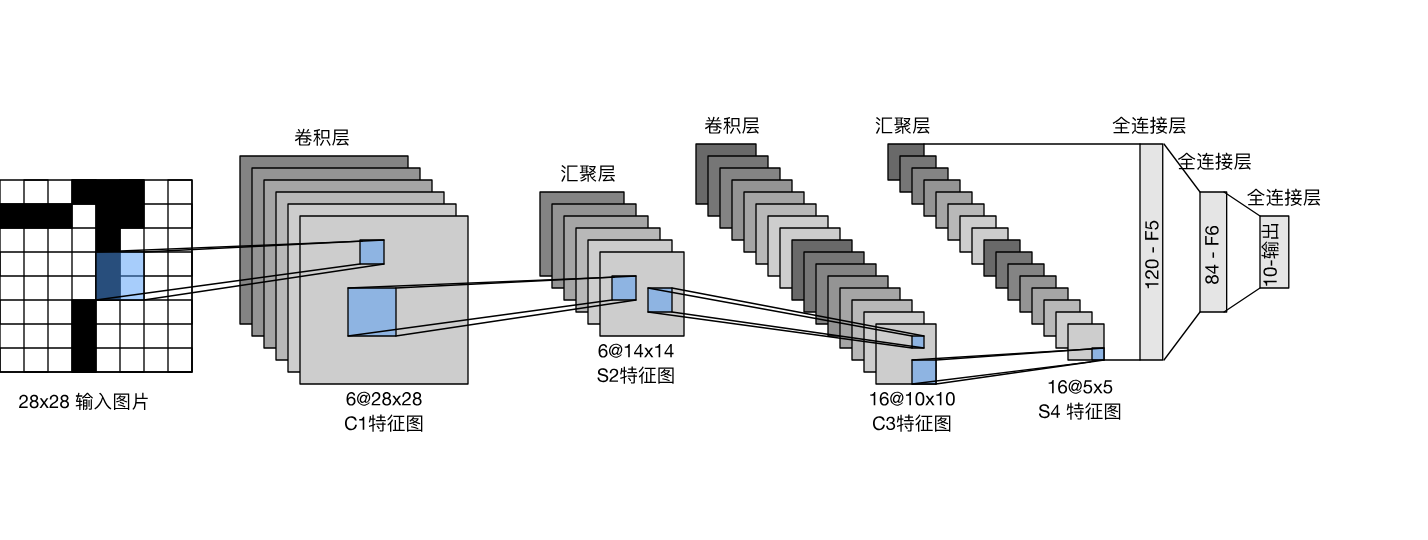
简单介绍: 从网络结构可以看出LeNet对于现在的大模型来说是一个非常小的神经网络,他一共由7个层顺序连接组成。分别是卷积层、pooling层、卷积层、pooling层和三个全连接层。用现代的深度学习框架来实现代码如下:
代码实现和解读:
net = nn.Sequential( nn.Conv2d(1, 6, kernel_size=5, padding=2), nn.Sigmoid(), nn.AvgPool2d(kernel_size=2, stride=2), nn.Conv2d(6, 16, kernel_size=5), nn.Sigmoid(), nn.AvgPool2d(kernel_size=2, stride=2), nn.Flatten(), nn.Linear(16 * 5 * 5, 120), nn.Sigmoid(), nn.Linear(120, 84), nn.Sigmoid(), nn.Linear(84, 10))
解读: 这一部分是有关网络的定义,可以看出网络的基本层实现都调用了torch的库,sigmoid() 函数的作用是:让网络中各层叠加后不会坍缩,因为引入了非线性函数。我们来输出一下网络的各层的结构。
X = torch.rand(size=(1, 1, 28, 28), dtype=torch.float32) for layer in net: X = layer(X) print(layer.__class__.__name__, 'output shape: \t:', X.shape)
Conv2d output shape: : torch.Size([1, 6, 28, 28]) Sigmoid output shape: : torch.Size([1, 6, 28, 28]) AvgPool2d output shape: : torch.Size([1, 6, 14, 14]) Conv2d output shape: : torch.Size([1, 16, 10, 10]) Sigmoid output shape: : torch.Size([1, 16, 10, 10]) AvgPool2d output shape: : torch.Size([1, 16, 5, 5]) Flatten output shape: : torch.Size([1, 400]) Linear output shape: : torch.Size([1, 120]) Sigmoid output shape: : torch.Size([1, 120]) Linear output shape: : torch.Size([1, 84]) Sigmoid output shape: : torch.Size([1, 84]) Linear output shape: : torch.Size([1, 10])
接下来我们利用沐神的d2l包中的数据集准备函数来下载MNIST数据集。
def evaluate_accuracy_gpu(net, data_iter, device=None): if isinstance(net, nn.Module): # * 判断变量的类型 net.eval() #? 将网络设置为评估模式, 在此模式下,net会关闭一些特定的训练技巧以确保网络的行为和训练时一致 if not device: device = next(iter(net.parameters())).device metric = d2l.Accumulator(2) with torch.no_grad(): for X, y in data_iter: if isinstance(X, list): X = [x.to(device) for x in X] else: X = X.to(device) # * .to(device)是为了将数据送至指定的设备上进行计算 y = y.to(device) metric.add(d2l.accuracy(net(X), y), y.numel()) return metric[0] / metric[1] # * 这里返回的是预测精度
以上的这段代码的关键步骤是执行了.to(device)操作,上述方法作用的调用可用的GPU进行加速运算。
接下来这段代码是对net执行训练的方法定义:
def train_ch6(net, train_iter, test_iter, num_epochs, lr, device): def init_weights(m): if type(m) == nn.Linear or type(m) == nn.Conv2d: nn.init.xavier_uniform_(m.weight) # ? 初始化参数 net.apply(init_weights) print('training on', device) net.to(device) optimizer = torch.optim.SGD(net.parameters(), lr=lr) loss = nn.CrossEntropyLoss() # ? 交叉熵损失函数 animator = d2l.Animator(xlabel='epoch', xlim=[3, num_epochs], ylim=[0, 2],legend=['train loss', 'train acc', 'test acc']) timer, num_batches = d2l.Timer(), len(train_iter) for epoch in range(num_epochs): metric = d2l.Accumulator(3) net.train() # ? 将网络设置为训练模式 for i, (X, y) in enumerate(train_iter): # ? enumerate会返回索引同时返回对应迭代次数时的元素 optimizer.zero_grad() X, y = X.to(device), y.to(device) y_hat = net(X) l = loss(y_hat, y) l.backward() optimizer.step() with torch.no_grad(): metric.add(l * X.shape[0], d2l.accuracy(y_hat, y), X.shape[0]) timer.stop() train_l = metric[0] / metric[1] train_acc = metric[1] / metric[2] if (i + 1) % (num_batches // 5) == 0 or i == num_batches - 1: animator.add(epoch + (i + 1) / num_batches, (train_l, train_acc, None)) test_acc = evaluate_accuracy_gpu(net, test_iter) animator.add(epoch + 1, (None, None, test_acc)) print(f'loss {train_l:.3f}, train acc {train_acc:.3f}, ' f'test acc {test_acc:.3f}') print(f'{metric[2]*num_epochs / timer.sum():.1f} examples/sec ' f'on {str(device)}')
这段代码非常的长,我们将其分为几个部分来进行解读:
首先:
def init_weights(m): if type(m) == nn.Linear or type(m) == nn.Conv2d: nn.init.xavier_uniform_(m.weight) # ? 初始化参数 net.apply(init_weights)
这一段摘要做的是网络所有参数的初始化。
其次:
print('training on', device) net.to(device) optimizer = torch.optim.SGD(net.parameters(), lr=lr) loss = nn.CrossEntropyLoss() # ? 交叉熵损失函数 animator = d2l.Animator(xlabel='epoch', xlim=[3, num_epochs], ylim=[0, 2],legend=['train loss', 'train acc', 'test acc']) timer, num_batches = d2l.Timer(), len(train_iter)
这一段主要是定义了网络训练和结果可视化的必要变量,并将网络放在GPU上进行运行。
接下来:
for epoch in range(num_epochs): metric = d2l.Accumulator(3) net.train() # ? 将网络设置为训练模式 for i, (X, y) in enumerate(train_iter): # ? enumerate会返回索引同时返回对应迭代次数时的元素 optimizer.zero_grad() X, y = X.to(device), y.to(device) y_hat = net(X) l = loss(y_hat, y) l.backward() optimizer.step() with torch.no_grad(): metric.add(l * X.shape[0], d2l.accuracy(y_hat, y), X.shape[0]) timer.stop() train_l = metric[0] / metric[1] train_acc = metric[1] / metric[2] if (i + 1) % (num_batches // 5) == 0 or i == num_batches - 1: animator.add(epoch + (i + 1) / num_batches, (train_l, train_acc, None)) test_acc = evaluate_accuracy_gpu(net, test_iter) animator.add(epoch + 1, (None, None, test_acc))
这一部分是最重要的训练部分:前向传导、计算损失、对损失进行反向传导并计算梯度、根据梯度来更新参数。对每一个样本都进行上述的基本过程。
剩下的部分就是对训练的中间过程进行适当的输出。
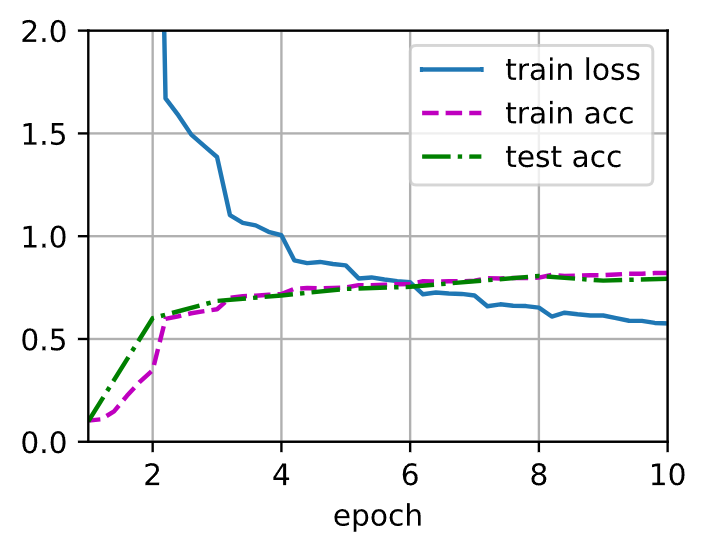
lr, num_epochs = 0.9, 10 train_ch6(net, train_iter, test_iter, num_epochs, lr, d2l.try_gpu())
这段代码描述的是网络训练器使用的过程。根据上述参数定义,得到的训练结果如下图:
模型局部最优化:
接下来,我想做的是,利用循环和结果可视化来找到这个模型下的局部最优超参数。



