复现YOLO-of-RoboMaster-Keypoints-Detection-2023
开源仓库地址:
https://github.com/zRzRzRzRzRzRzR/YOLO-of-RoboMaster-Keypoints-Detection-2023
该仓库提供了数据集,目前只是测试了能不能训练
复现过程
git clone
下载源码
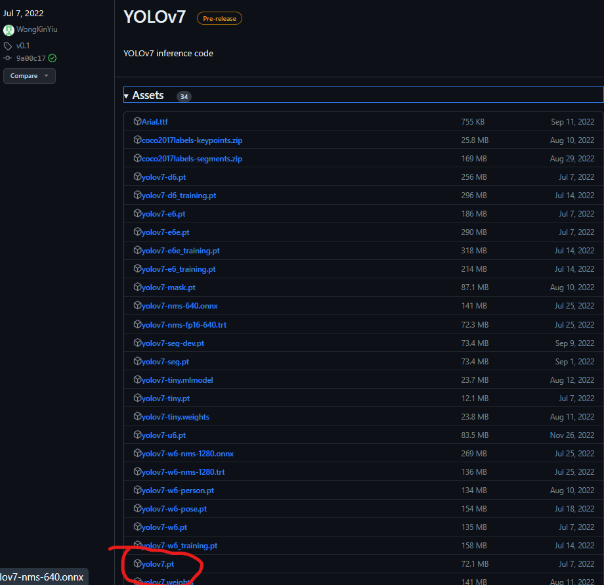
下载相应权重文件yolov7.pt
去到yolov7开源仓库,找到release,下载yolov7.pt
下载数据集并设置yaml
下载完后,将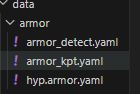
armor_kpt.yaml修改,将train和val给改成自己的目录
尝试首先测试测试装甲版四点模型

将train.py文件修改成这样,(把视觉版识别模型注释,把装甲板四点模型注释取消并修改)
修改epochs = 64 ,防止爆显存。
训练
终端输入:
python train.py
导出onnx模型
python export.py --weights yolov7.pt --device 0
部署
安装openvino环境
我们选择github源码编译,该仓库中既有Development Tools,又有Runtime
- step1:
git clone -b 2022.3.1 https://github.com/openvinotoolkit/openvino.git
- step2:打开其build教程:https://github.com/openvinotoolkit/openvino/blob/2022.3.1/docs/dev/build.md
首先是环境要求:
Linux Linux操作系统
CMake 3.13 or higher
CMake 3.13 或更高版本
GCC 7.5 or higher to build OpenVINO Runtime
GCC 7.5 或更高版本,用于构建 OpenVINO 运行时
Python 3.7 or higher for OpenVINO Runtime Python API
适用于 OpenVINO 运行时 Python API 的 Python 3.7 或更高版本
(Optional) Install Intel® Graphics Compute Runtime for OpenCL™ Driver package 19.41.14441 to enable inference on Intel integrated GPUs.
(可选)安装适用于 OpenCL™ 的英特尔图形计算运行时驱动程序包 19.41.14441,以在英特尔®集成 GPU 上启用推理。
初始化:
cd openvino
git submodule update --init --recursive
使用项目根文件夹中的 install_build_dependencies.sh 脚本安装生成依赖项:
chmod +x install_build_dependencies.sh
./install_build_dependencies.sh
创建构建文件夹:
mkdir build && cd build
cmake创建:
cmake -DCMAKE_BUILD_TYPE=Release ..
make --jobs=$(nproc --all)
等一段时间,即可完成
- step3:添加环境变量
我们添加c++版本的环境变量:
export LD_LIBRARY_PATH=LD_LIBRARY_PATH:<openvino_repo>/bin/intel64/Release
但这样之后还会出现一个报错:
Could Not Find a Package Configuration File Provided by “InferenceEngine”,这还是环境变量没设置好
我们还需要在环境变量中添加:
export ngraph_DIR=/home/你的电脑名字/openvino/build/
export InferenceEngine_DIR=/home/你的电脑名字/openvino/build
来源:https://www.intel.com/content/www/us/en/support/articles/000055345/boards-and-kits.html
修改代码部分
1.将要推理的视频改成自己的,注意相对路径要写正确,可以写绝对路径
2.将使用的权重文件改成自己的,与上同理
3.读readme.md,修改推理模型参数,cmake之后make即可

 浙公网安备 33010602011771号
浙公网安备 33010602011771号