【学习笔记】二维凸包
只会二维凸包,其他的都不会
概述
凸包是啥
凸包(Convex Hull)是一个计算几何(图形学)中的概念。
在一个实数向量空间V中,对于给定集合X,所有包含X的凸集的交集S被称为X的凸包。X的凸包可以用X内所有点(X1,...Xn)的凸组合来构造。
在二维欧几里得空间中,凸包可想象为一条刚好包著所有点的橡皮圈。
用不严谨的话来讲,给定二维平面上的点集,凸包就是将最外层的点连接起来构成的凸多边形,它能包含点集中所有的点。——摘自《百度百科》
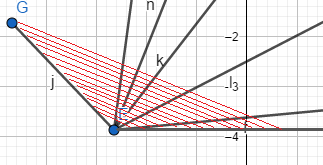
当然,这不重要,凸包一般长这样: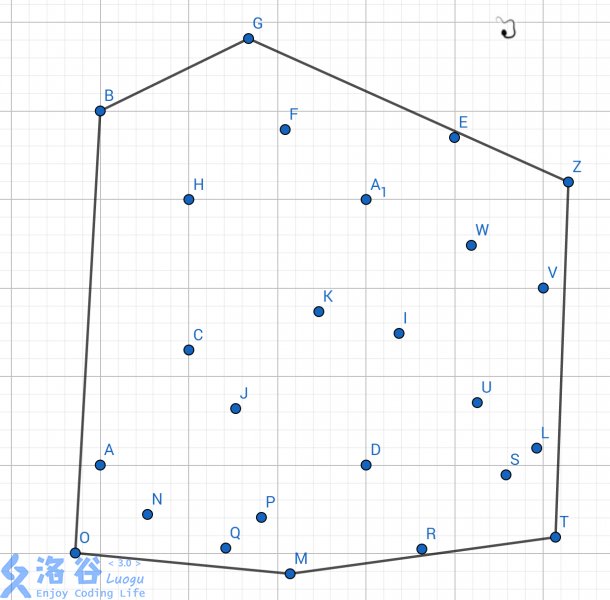 $$图1.1$$
$$图1.1$$
凸包在OI中的应用远超计算几何的范畴,除了一些对求凸包的显性考察外,用数据结构维护动态凸包,斜率优化等中都有所涉及。
然而,这里只会讲放凸包的计算几何算法
例题
P2742 [USACO5.1]圈奶牛Fencing the Cows /【模板】二维凸包
算法实现
Graham扫描法
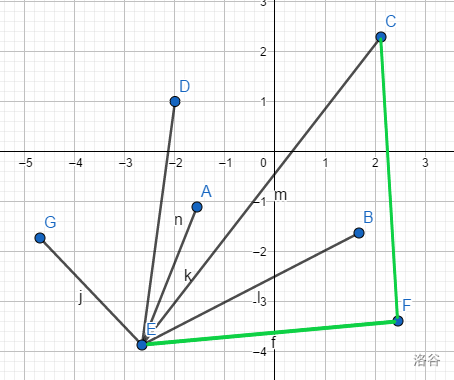
首先找到最靠近左下的那个点,这个点一定在凸包上,不然就不是把最外层围起来了。
其中,左下强调下,即以 \(y\) 轴为第一关键字。
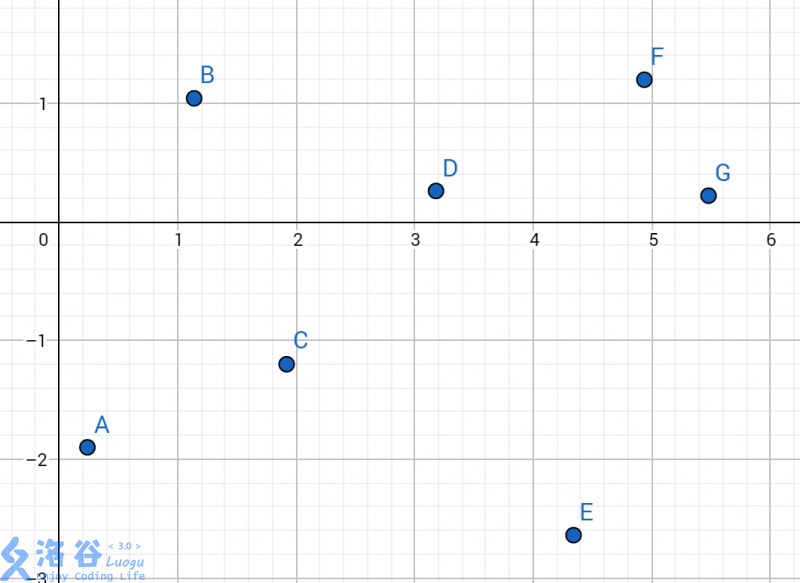
如上图,最靠近左下的是点E,而不是点A。
然后,以这个点为极点,其他点按照极角排序。
这里先介绍一个黑科技:\(atan2\) 函数
atan2(x, y) 返回 \(tanα\) \(=\) \(\frac{x}{y}\) 中的 \(α\),同时满足 \(α\) \(\in \left [ -\pi , \pi \right ]\)。
当 \(y = 0\) 时, \(tanα\) 不存在,返回 \(0\) , 当 \(x = 0\) 时,返回 \(-1\)。
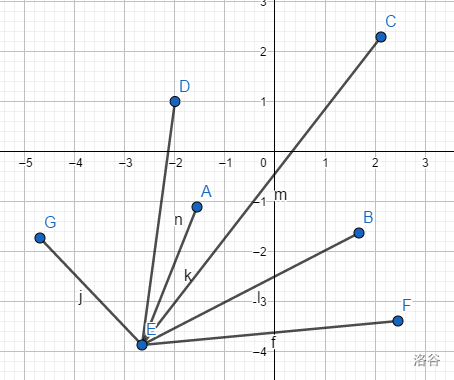
在上图中,每个点的极角是由点E到其他的点连成的直线 与 点E所在的与 \(x\) 轴平行的直线所成的夹角。
比如这个:
是点F的极角。
这个是点G的极角。
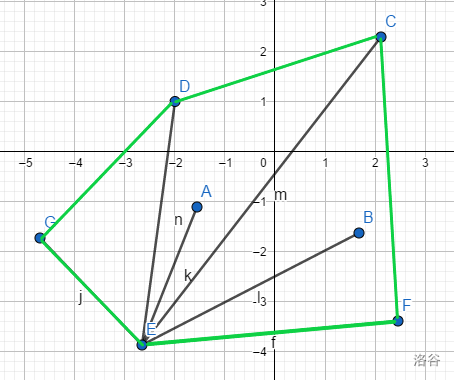
还是看上图2.2.1,排序结果是FBCADG,可以理解成从0度逆时针扫一圈。
直接快排实现就行,比较函数长这样:
inline bool cmp(const Cartesian &a, const Cartesian &b){
double A = atan2((a.y - point[1].y), (a.x - point[1].x));
double B = atan2((b.y - point[1].y), (b.x - point[1].x));
if(A != B) return A < B;//按极角的大小递增排序
else if(a.x != b.x) return a.x < b.x;//如果极角相同,x坐标小的点在前
else return a.y < b.y;//如果极角和x坐标都相同,y坐标小的在前
}
之后,按照顺序依次访问所有点,判断可行性。
用图来讲:
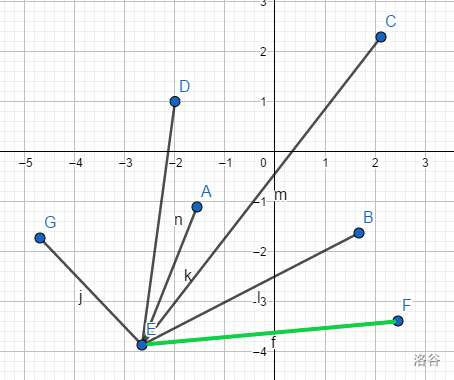
先把极角最小的E丢到凸包的栈里边,准备开始扫描。
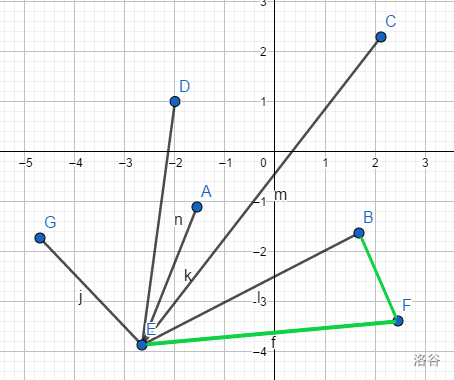
检查B是否在F的一侧(检查是不是凸多边形)。
这里检查到B可行,先加入到栈中。
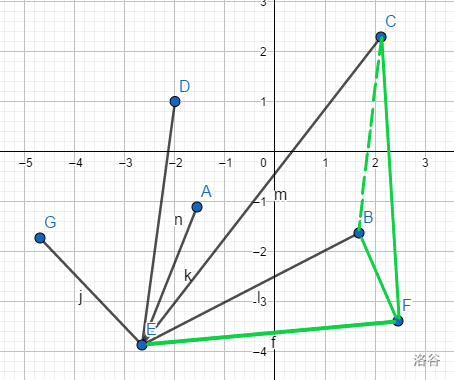
检查到C更加靠近外侧(如果加入B就会形成凹多边形,显然B在凸包中,而C不在)
然后把B点弹出栈,判断E和C的关(同判断B)
依次这么判断,最后所有凸包上的点都会在栈中
继续解决一些细节上的问题: 怎么计算一个节点是否在前一个点的一侧。
这就需要引入一个数学上的东西:叉积
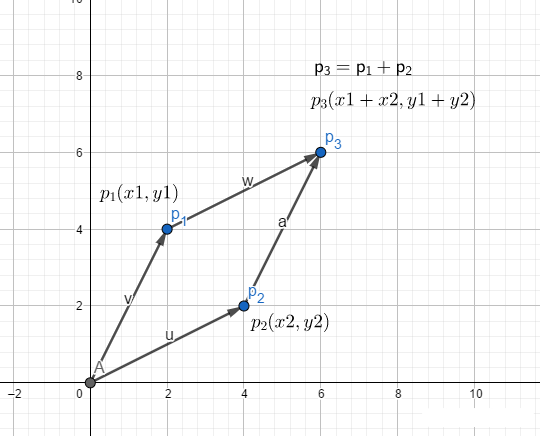
\(\vec{p_{1}}\times\vec{p_{2}}\) 即为平行四边形面积。
原理不会。看这个blog。
公式:\(\vec{p_{1}}\ast\vec{p_{2}} = {x_{1}}{y_{2}} - {x_{2}}{y_{1}}\)。
double Get_Cross(Cartesian a, Cartesian b, Cartesian c){
return 1.0 * (b.x - a.x) * (c.y - a.y) - 1.0 * (b.y - a.y) * (c.x - a.x);
} //计算两向量的叉积
对于函数的意义,首先函数的正负是有特殊含义的:以C为参考点,如果大于0,则B在A的逆时针方向,反之,如果小于0,则B在A的顺时针方向,特殊的,当等于0,A、B、C三点共线。
详细的叉积可以看这位大佬的blog。
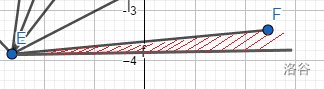
具体判断的话,还是上图
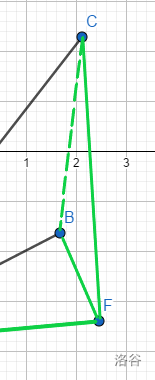
要判断点B是否在CF的外侧,计算\(\vec{FC} * \vec{FB}\) 。
B点坐标 \((1.68, -1.63)\) ,C点坐标 \((2.12, 2.29)\) ,F点坐标 \((2.46 -3.39)\) 。
\(\vec{FB} = (-0.78, 1.76)\) , \(\vec{FC} = (-0.34, 5.68)\) 。
\(\vec{FC} * \vec{FB} = 3.832 > 0\)
Code
#include<cmath>
#include<cstdio>
#include<cstdlib>
#include<algorithm>
using namespace std;
const int MAXN = 1e5 + 10;
const double INF = 1145141919810;
int n, top;
double ans;
struct Cartesian{
double x, y;
}point[MAXN], s[MAXN];
inline bool cmp(const Cartesian &a, const Cartesian &b){
double A = atan2((a.y - point[1].y), (a.x - point[1].x));
double B = atan2((b.y - point[1].y), (b.x - point[1].x));
if(A != B) return A < B; //按极角的大小递增排序
else if(a.x != b.x) return a.x < b.x; //如果极角相同,x坐标小的点在前
else return a.y < b.y; //如果极角和x坐标都相同,y坐标小的在前
}
double Get_Dis(Cartesian a, Cartesian b){
return sqrt((1.0 * (a.x - b.x) * (a.x - b.x)) + (1.0 * (a.y - b.y) * (a.y - b.y)));
} //计算两点间距离
double Get_Cross(Cartesian a, Cartesian b, Cartesian c){
return 1.0 * (b.x - a.x) * (c.y - a.y) - 1.0 * (b.y - a.y) * (c.x - a.x);
} //计算两向量的叉积
void Get_Bag(){ //造凸包
Cartesian point_left = (Cartesian){INF, INF};
int pos;
for(register int i = 1; i <= n; i++){
if(point[i].y < point_left.y || (point[i].y == point_left.y && point[i].x < point_left.x)){
point_left = point[i];
pos = i;
}
} //寻找最左下角的点
swap(point[pos], point[1]);
sort(point + 2, point + 1 + n, cmp); //按极角顺序排序
s[++top] = point[1], s[++top] = point[2];
for(register int i = 3; i <= n;){
if(top >= 2 && Get_Cross(s[top - 1], point[i], s[top]) >= 0)
top--;
else s[++top] = point[i++];
}
s[0] = s[top]; //记得凸包是闭合的
}
int main(){
scanf("%d", &n);
for(register int i = 1; i <= n; i++)
scanf("%lf%lf", &point[i].x, &point[i].y);
Get_Bag();
while(top >= 1){
Cartesian p1 = s[top];
Cartesian p2 = s[top - 1];
ans += Get_Dis(p1, p2);
top--;
}
printf("%.2lf", ans);
return 0;
}
Andrew算法
不会,咕咕咕。
以下为博客签名,与博文无关。
只要你们不停下来,那前面就一定有我。所以啊,不要停下来~
本文来自博客园,作者:TSTYFST,转载请注明原文链接:https://www.cnblogs.com/TSTYFST/p/16499792.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号