

双指针之快慢指针
快慢指针(Floyd 判圈法)
1、简介
对于链表找环路的问题,有一个通用的解法——快慢指针(Floyd 判圈法)。
给定两个指针,分别命名为 slow 和 fast,起始位置在链表的开头。每次 fast 前进两步,slow 前进一步。如果 fast
可以走到尽头,那么说明没有环路;如果 fast 可以无限走下去,那么说明一定有环路,且一定存在某个时刻 slow 和 fast 相遇。当 slow 和 fast 第一次相遇时,我们将 fast 重新移动到链表开头,并让 slow 和 fast 每次都前进一步。当 slow 和 fast 第二次相遇时,相遇的节点即为环路的开始点
2、推导
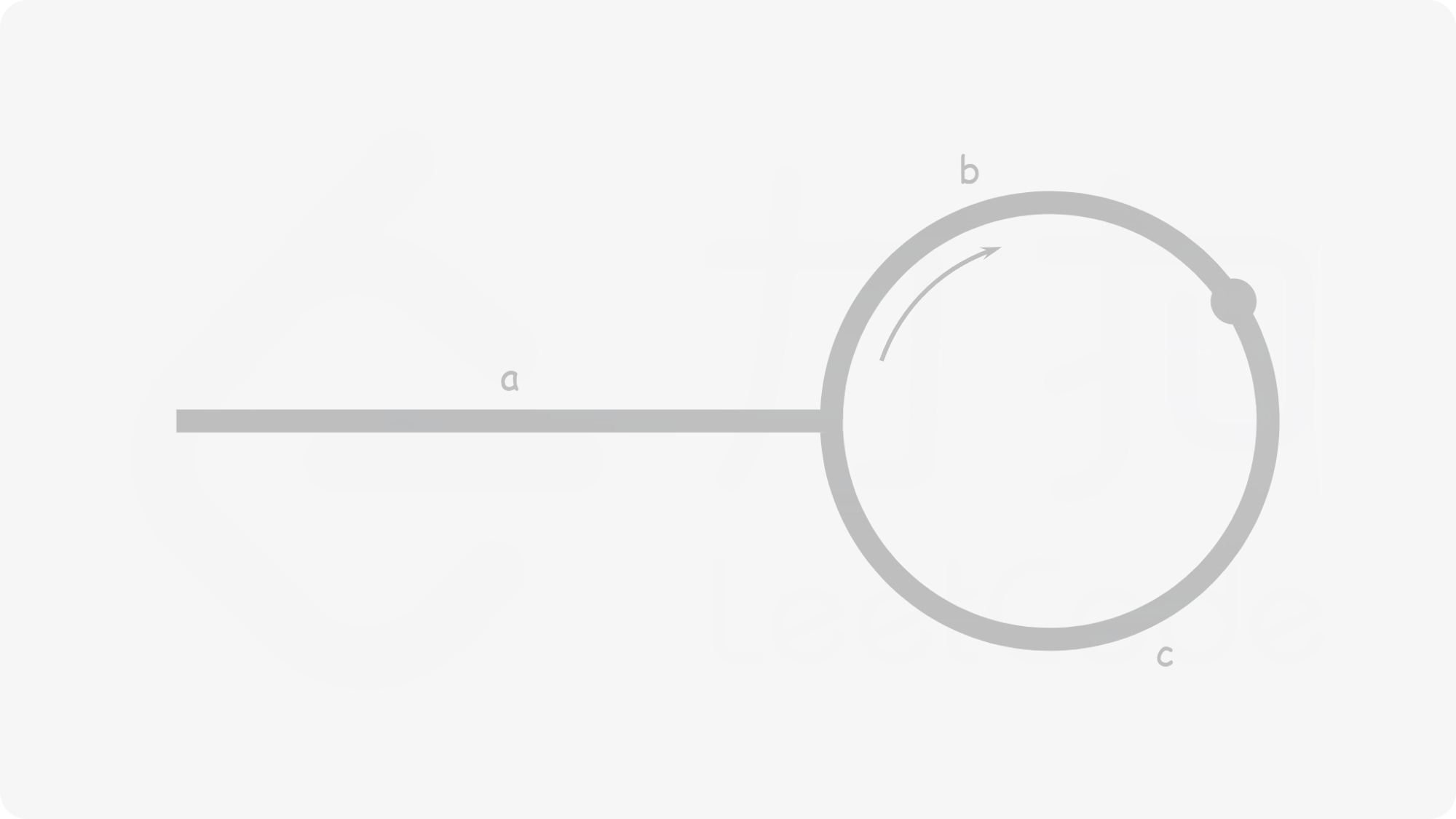
如上图所示,设链表中入环前的部分长为 ,slow 指针入环后,又走了 的距离与 fast 相遇,剩下距离 才走完当前环
此时,fast 比 slow 多走了环的 圈,fast 走过的总距离为 ,slow 走过的总距离为
根据题意,fast 走过的距离恒为 slow 的两倍,故 ,即
从上式我们可以看出,从相遇点到入环点的距离加上 圈的环长,恰好等于从链表头部到入环点的距离。此时,我们再让 fast 指针指向链表的头部,随后,它和 slow 每次向后移动一个位置。最终,它们会在入环点相遇
/** * Definition for singly-linked list. * struct ListNode { * int val; * ListNode *next; * ListNode(int x) : val(x), next(NULL) {} * }; */ class Solution { public: ListNode *detectCycle(ListNode *head) { ListNode* fast = head; ListNode* slow = head; do { if (fast == nullptr || fast->next == nullptr) return nullptr; fast = fast->next->next; slow = slow->next; } while (fast != slow); fast = head; while (fast != slow) { fast = fast->next; slow = slow->next; } return fast; } };
如果您觉得阅读本文对您有帮助,请点一下“推荐”按钮,您的“推荐”将是我最大的写作动力!欢迎各位转载,但是未经作者本人同意,转载文章之后必须在文章页面明显位置给出作者和原文连接,否则保留追究法律责任的权利。












【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 别再用vector<bool>了!Google高级工程师:这可能是STL最大的设计失误
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)