


轮廓拟合
轮廓拟合
简介
- 由于噪声和光照的影响,物体的轮廓会出现不规则的形状,不规则的轮廓形状不利于对图像内容进行分析,此时需要将物体的轮廓拟合成规则的几何形状,根据需求可以将图像轮廓拟合成矩形、多边形等
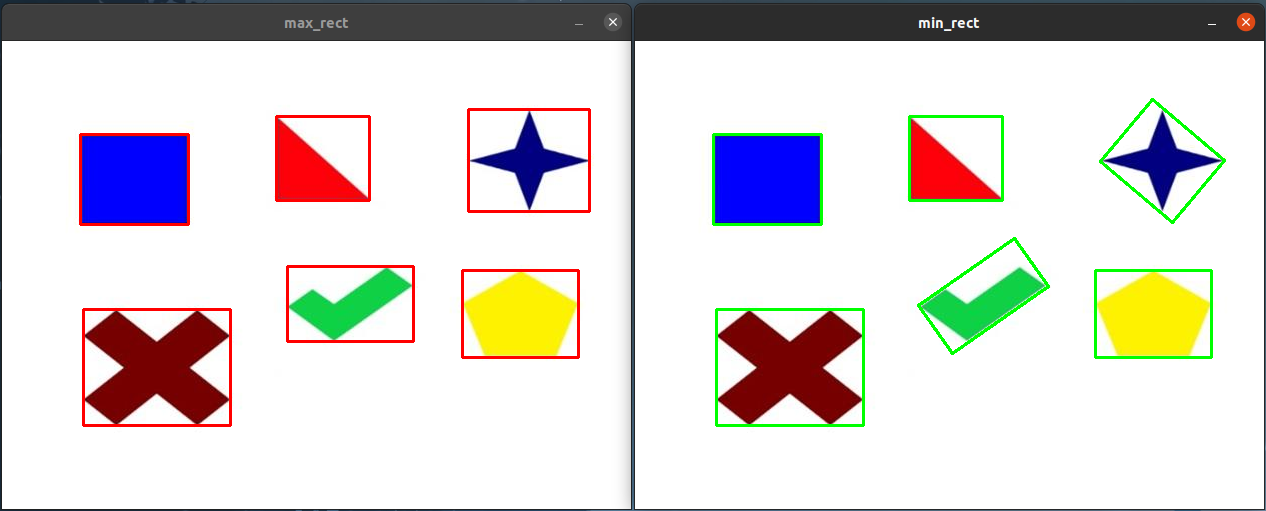
矩形
最大外接矩形
Rect cv::boundingRect(IuputArray array)
- array:输入的灰度图像或者二维点集,灰度图像的参数类型为 Mat,二维点集的参数类型为 vector
或者 Mat
该函数的返回值是一个 Rect 类型的变量,该变量可以直接用rectangle()函数绘制矩形
最小外接矩形
RotatedRect cv::minAreaRect(IuputArray points)
- points:表示输入的二维点集合
返回值是 RotatedRect 类型的变量,含有矩形的中心位置,矩形的宽和高,以及矩形旋转的角度。RotatedRect 类具有两个重要的方法和属性,可以输出矩形的4个顶点和中心坐标。输出4个顶点坐标的方法是 points()。假设 RotatedRect 类的变量为 rrect,可以通过rrect.points(points)命令进行读取,其中存放坐标的变量是 Point2f 类型的数组。输出矩形中心坐标的属性是 center,假设 RotatedRect 类的变量 rrect,可以通过opt = rrect.center命令进行读取,其中存放坐标的变量是 Point2f 类型
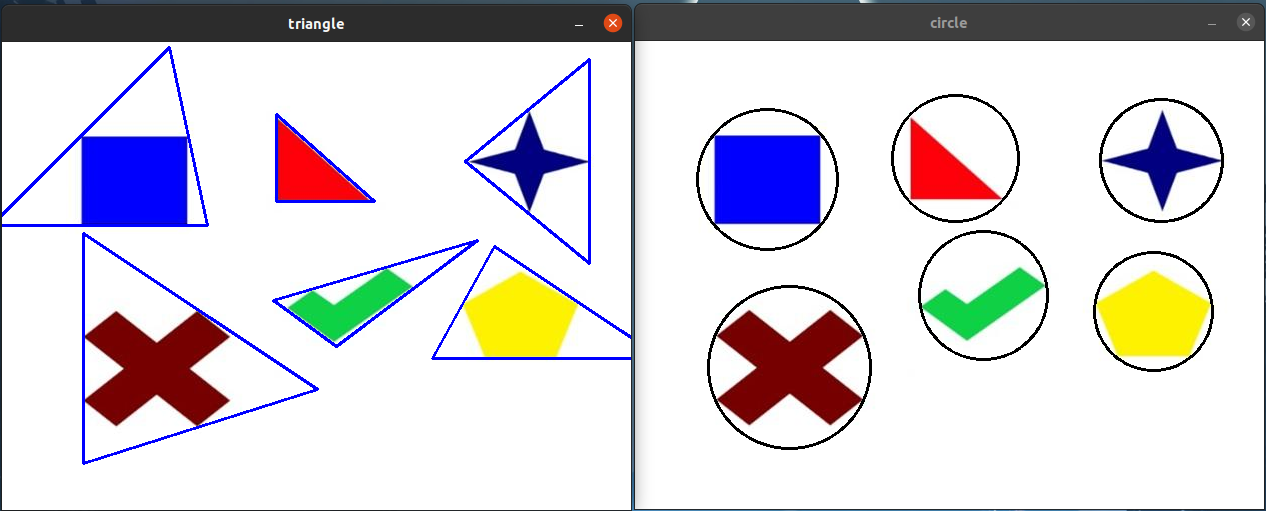
圆
void cv::minEnclosingCircle(IuputArray points, Point2f & center, float & radius)
- points:待寻找包围圆形的二维点集,类型为 vector<Point> 或者 Mat
- center:圆形的圆心
- radius:圆形的半径
三角形
double cv::minEnclosingTriangle(InputArray points, OutputArray, triangle)
- points:待寻找包围三角形的二维点集,类型为 vector<Point>
- triangle:拟合出的三角形的3个顶点坐标,存放在 vector<Point2f> 类型的变量中
该函数能够找到包含给定三维点集的最小区域的三角形,返回值为 double 类型的三角形面积
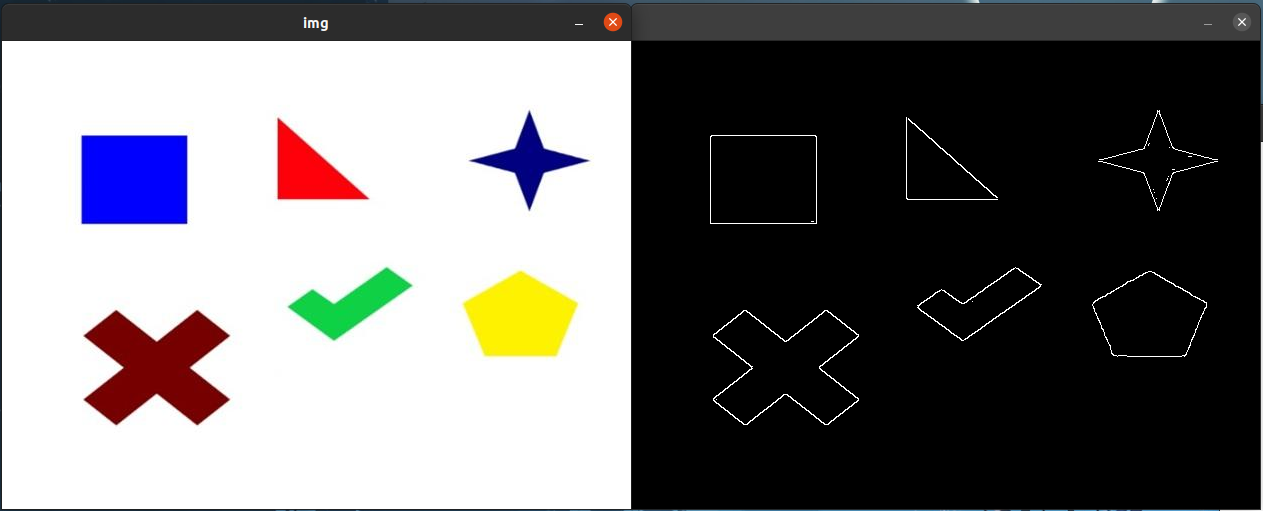
实现
示例代码:
#include <opencv2/opencv.hpp> #include <vector> using namespace cv; using namespace std; int main() { Mat img = imread("/home/kslas/test.jpg"); Mat img1, img2, img3, img4; img.copyTo(img1); // 深拷贝用来绘制最大外接矩形 img.copyTo(img2); // 深拷贝用来绘制最小外接矩形 img.copyTo(img3); // 深拷贝用来绘制拟合三角形 img.copyTo(img4); // 深拷贝用来绘制拟合圆形 imshow("img", img); // 去噪声与二值化 Mat canny; Canny(img, canny, 80, 160, 3, false); imshow(" ", canny); // 膨胀运算,将细小缝隙填补 Mat kernel = getStructuringElement(0, Size(3, 3)); dilate(canny, canny, kernel); // 轮廓的发现与绘制 vector<vector<Point>> contours; vector<Vec4i> hierarchy; findContours(canny, contours, hierarchy, 0, 2); // 寻找轮廓拟合图形 for (int i = 0; i < contours.size(); i++) { // 最大外接矩形 Rect rect = boundingRect(contours[i]); rectangle(img1, rect, Scalar(0, 0, 255), 2); // 最小外接矩形 RotatedRect rrect = minAreaRect(contours[i]); Point2f points[4]; rrect.points(points); // 读取最小矩形的4个顶点 Point2f cpt = rrect.center; // 最小外接矩形的中心 // 绘制旋转矩形与中心位置 for (int j = 0; j < 4; j++) { if (j == 3) { line(img2, points[j], points[0], Scalar(0, 255, 0), 2); break; } line(img2, points[j], points[j + 1], Scalar(0, 255, 0), 2); } // 绘制矩形的中心 circle(img, cpt, 2, Scalar(255, 0, 0), 2); // 绘制三角形 vector<Point> triangle; double area = minEnclosingTriangle(contours[i], triangle); for (int j = 0; j < 3; j++) { if (j == 2) { line(img3, triangle[j], triangle[0], Scalar(255, 0, 0), 2); break; } line(img3, triangle[j], triangle[j + 1], Scalar(255, 0, 0), 2); } // 绘制圆形 Point2f center; float radius = 0; minEnclosingCircle(contours[i], center, radius); circle(img4, center, cvRound(radius), Scalar(0, 0, 0), 2); } // 输出轮廓拟合结果 imshow("max_rect", img1); imshow("min_rect", img2); imshow("triangle", img3); imshow("circle", img4); waitKey(0); destroyAllWindows(); return 0; }
运行结果:
如果您觉得阅读本文对您有帮助,请点一下“推荐”按钮,您的“推荐”将是我最大的写作动力!欢迎各位转载,但是未经作者本人同意,转载文章之后必须在文章页面明显位置给出作者和原文连接,否则保留追究法律责任的权利。












【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 分享一个免费、快速、无限量使用的满血 DeepSeek R1 模型,支持深度思考和联网搜索!
· 基于 Docker 搭建 FRP 内网穿透开源项目(很简单哒)
· ollama系列01:轻松3步本地部署deepseek,普通电脑可用
· 25岁的心里话
· 按钮权限的设计及实现