Learning from the Best: Rationalizing Prediction by Adversarial Information Calibration
最近看了一些关于Rationale的方法,选取其中一篇写个笔记
Motivation
- 之前的rationale的方法中,选择器和预测器的结果来自于预测对真实答案的比较,这样的探索空间非常大。
- 通常用于实现rationale流畅性的正则化器以相同的方式对待所有相邻的token pairs。这通常会导致选择不必要的token,因为它们与rationale token相邻。
针对上面两个问题,作者提出了 InfoCal:
- 使用两个模型:selector-predictor model 和 guider,让他们得到的表征相互接近
- 引入“信息瓶颈”模块,鼓励模型学习least-but-enough的特征
- 另外使用自然语言模型来计算相邻token之间的相关性,并修改正则化系数
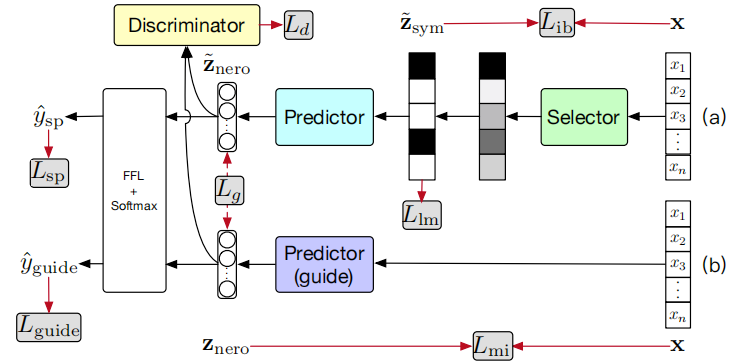
InfoCal: Selector-Predictor-Guider with Information Bottleneck
Selector
输入\(x=(x_1,x_2,\dots,x_n),y\),selector学习\(p(\tilde{z}_{sym}|x)\)并输出\(p_i\)表示第\(i\)个词属于rationale的概率,基于概率可以使用gumbel softmax采样得到rationale mask矩阵:
然后获取rationale筛选过的表征\(\tilde{z}_{sym} = (m_1x_1,m_2x_2,\dots, m_nx_n)\)
Predictor
\(\hat y\)就是预测的目标,由于中间有采样步骤,因此交叉熵损失通过琴声不等式可以计算出一个上界:
Guider
Guider模型学习一个\(\mathbf{Pred}_{G}\),然后根据预测采样得到一个稠密向量\(z_{nero}\)。
其中最后一步的预测层和Predictor共享参数。
Information Bottleneck
这个模块目标是学习least-but-enough的特征。
形式化为最小化\(I(x,\tilde{z}_{sym}) - I(\tilde{z}_{sym}, y))^2\),第一项是为了让模型学习尽可能少的特征,第二项是让模型学习尽可能有用的特征,其中第二部分在\(L_{sp}\)中实现,所以只需要考虑第一项。
由于\(p(\tilde z_{sym})\)难以计算,所以用变分分布\(r_{\phi}\)代替:
同理,对guide模型的约束:
Calibrating Key Features via Adversarial Training
我们希望告诉选择器仍然缺少什么类型的信息或错误地选择了什么。由于我们已经使用信息瓶颈原则来鼓励\(z_{nero}\)编码来自“最少但足够”特征的信息,如果我们还要求\(\tilde z_{nero}\)和\(z_{nero}\)编码相同的信息,那么我们将鼓励选择器选择“最少但足够”的离散特征。为了达到这个目的,我们使用了一种基于对抗的训练方法。因此,我们采用一个额外的鉴别器神经模块,称为\(D\),它将\(\tilde z_{nero}\)或\(z_{nero}\)作为输入,并分别输出0或1。鉴别器可以是任何可微神经网络。我们模型中的生成器是由输出\(\tilde z_{nero}\)的选择器-预测器组成的。与发生器和鉴别器相关的损失为:
Regularizing Rationales with Language Models
用自然语言模型来建模两个相邻token之间应该连续的概率,而不是视为完全一样的权重
Experiments
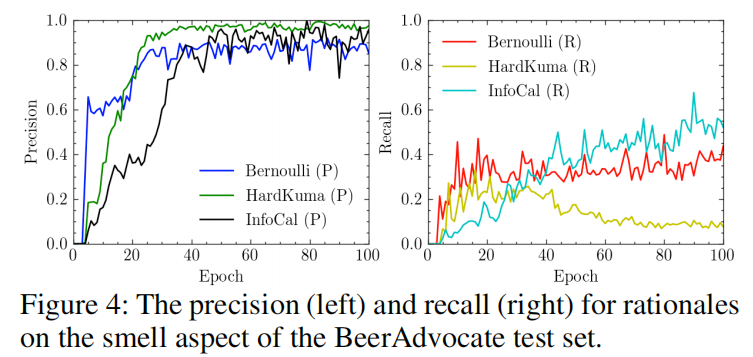
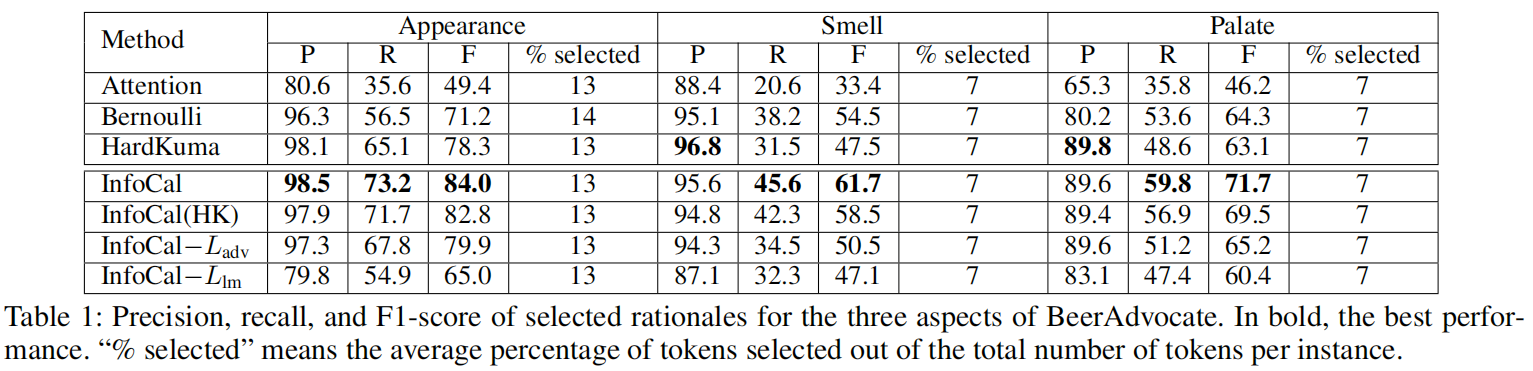
BeerAdvocate
- rationale 选择评估
- 模型表现
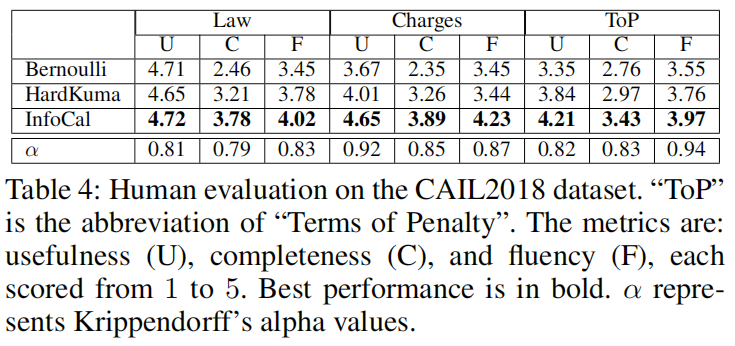
Legal Judgement Prediction
-
三个子任务表现
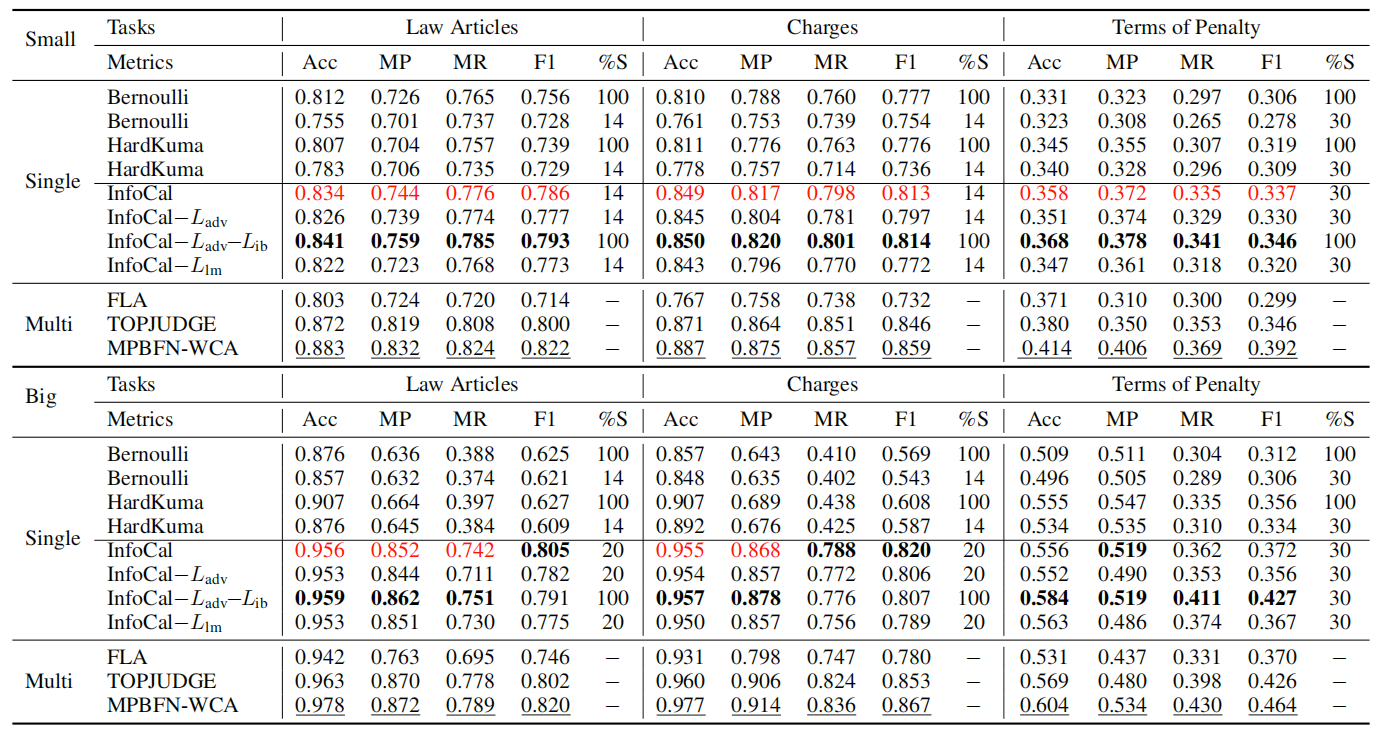
-
rationale选择

 浙公网安备 33010602011771号
浙公网安备 33010602011771号