蓝桥杯嵌入式模板创建(STM32 CubeMx简单使用教程)
蓝桥杯嵌入式新板模板创建&简单经验分享
补充在最前:
以下原文是22年还未毕业时写的,那时经验不多,现在也由于工作使用的芯片不同已很久没有使用CubeMX了,因此文章可能有很多错漏之处,欢迎在评论区指出。
当时整理的资料,包含22年以前的赛题:
链接:https://pan.baidu.com/s/1I8QjNOwCHjpuWItRn0aYvQ?pwd=1234 提取码:1234 复制这段内容后打开百度网盘手机App,操作更方便哦
备注在前: uint8_t 即 unsigned char(总忘
typedef unsigned char uint8_t;
本模板不保证完全正确
目录
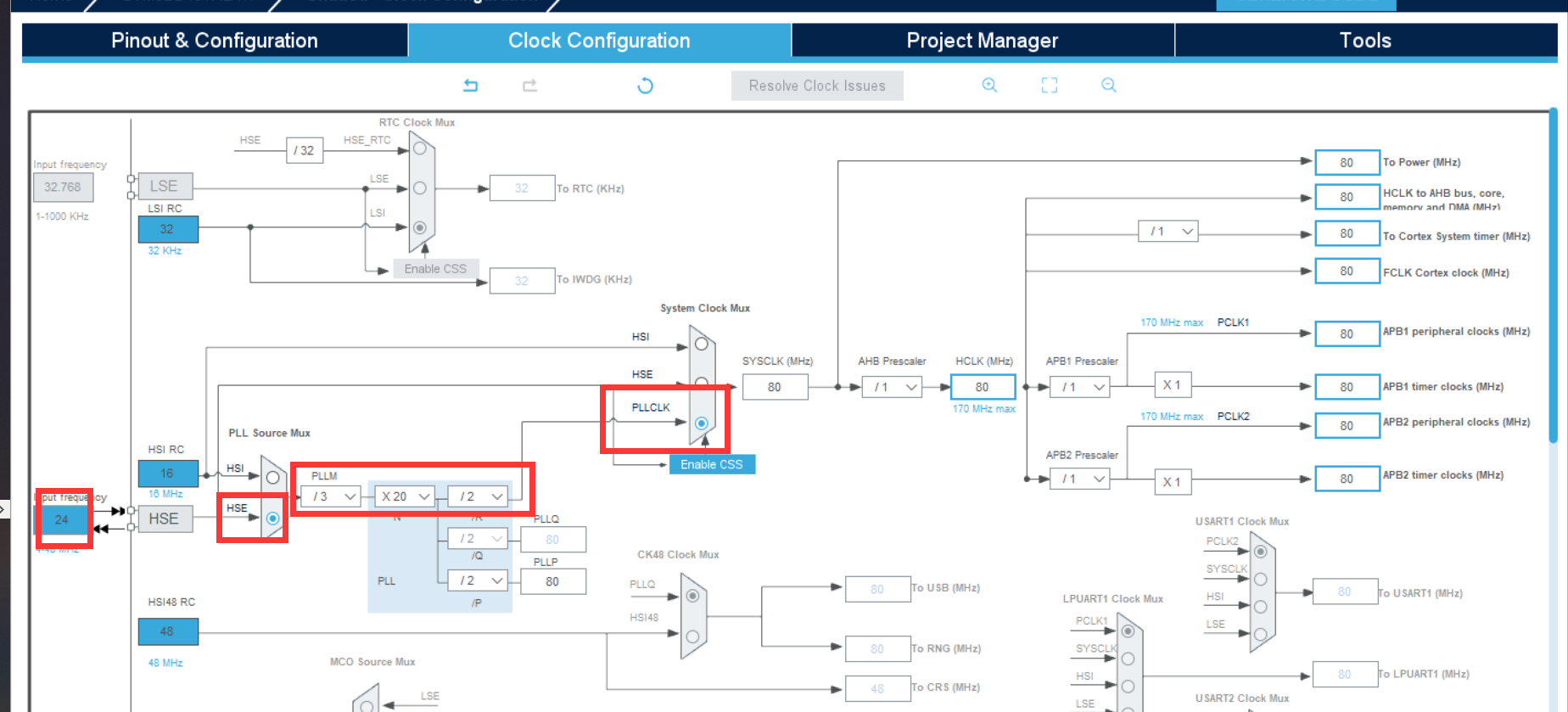
0. RCC 时钟树
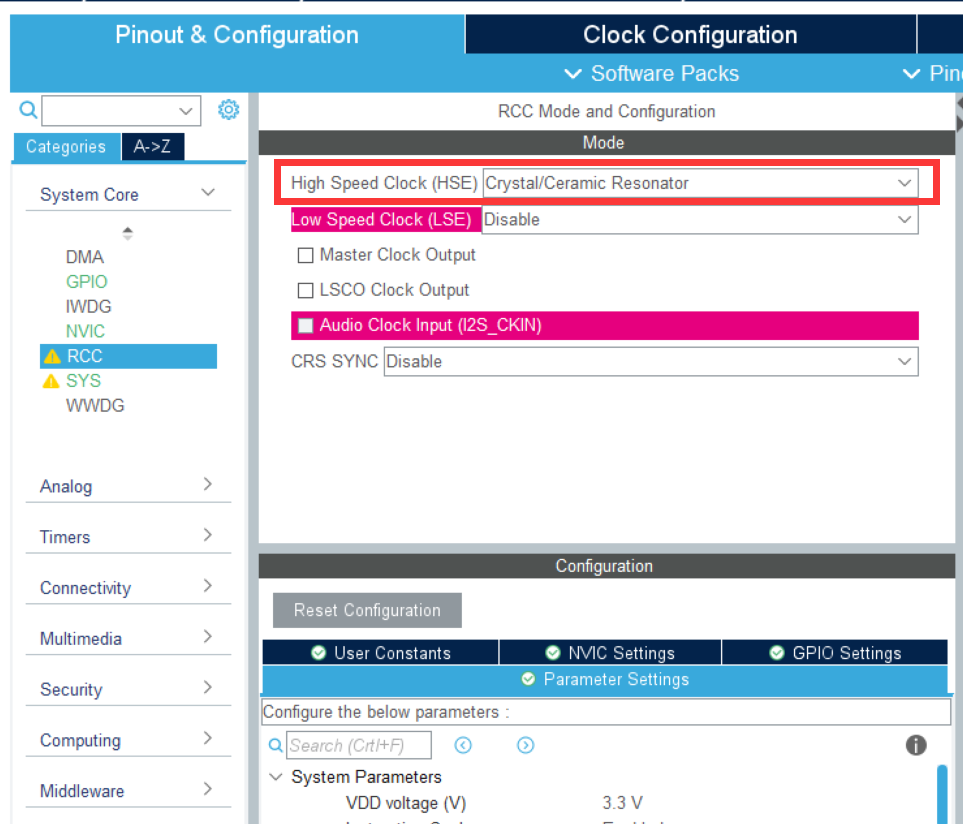
时钟树如下图红框处设置,最后生成的是80MHZ就对了
输出配置1
输出配置2
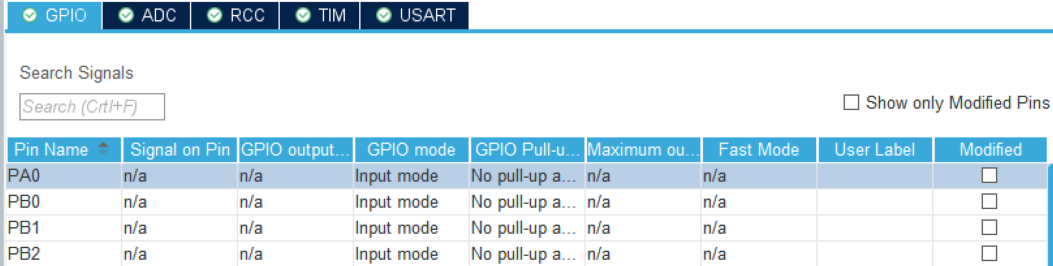
1. GPIO
1.1 LED
cubemx配置
配置引脚 PC8~15 输出output - 8LED

输出

需要手打的部分
//gpio.h
void LED_Disp(unsigned char ucLed);
// gpio.c
//函数名: LED_Disp
//函数功能: LD8-LED1对应ucLed的8个位
//传入参数: unsigned char ucLed
//返回值: 无
void LED_Disp(unsigned char ucLed)
{
//将所有的灯熄灭
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15|GPIO_PIN_8|GPIO_PIN_9|GPIO_PIN_10|GPIO_PIN_11|GPIO_PIN_12 , GPIO_PIN_SET);
// 说明:要使用GPIOC控制灯,需要使PD2引脚产生一个下降沿
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
//根据ucLed的数值点亮相应的灯
HAL_GPIO_WritePin(GPIOC, ucLed << 8, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
}
1.2 KEY
cubemx配置
配置引脚 PA0、PB0~2 输入input - 4KEY

需要手打的部分
// gpio.h
unsigned char Key_Scan(void);
// gpio.c
unsigned char Key_Scan(void)
{
unsigned char unKey_Val = 0;
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_0) == GPIO_PIN_RESET){
unKey_Val = 1;
}
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_1) == GPIO_PIN_RESET){
unKey_Val = 2;
}
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_2) == GPIO_PIN_RESET){
unKey_Val = 3;
}
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET){
unKey_Val = 4; //PA0对应按键B4
}
return unKey_Val;
}
// main.c
// 减速变量
__IO uint32_t uwTick_KEY = 0;
// 按键扫描专用变量
unsigned char Key_Val, Key_Up, Key_Down, Key_Old;
void Key_Proc(void)
{
// 减速
if((uwTick-uwTick_KEY)<100) return ;
uwTick_KEY = uwTick;
Key_Val = Key_Scan();
Key_Down = Key_Val & (Key_Old ^ Key_Val);
Key_Up = ~Key_Val & (Key_Old ^ Key_Val);
Key_Old = Key_Val;
if (Key_Down == 1){
LED_Disp(0x01);
}
if (Key_Down == 2){
LED_Disp(0x02);
}
if (Key_Down == 3){
LED_Disp(0x04);
}
if (Key_Down == 4){
LED_Disp(0x08);
}
}
关于按键的三行代码:https://blog.csdn.net/qq_43012492/article/details/107676658
2. LCD显示屏
官方会提供例程,把lcd.c、lcd.h和fonts.h加进自己的工程就好了
LCD液晶屏幕一行可显示20个英文字符,共10行
需要自己写的部分
// main.c 头文件别多加fonts
#include "lcd.h"
// 减速变量
__IO uint32_t uwTick_LCD = 0;
int main(){
LCD_Init();
LCD_Clear(White);
LCD_SetTextColor(Black);
LCD_SetBackColor(White);
while(1){
LCD_Proc();
}
}
void LCD_Proc(void){
// 减速
if((uwTick - uwTick_LCD) < 100) return ;
uwTick_LCD = uwTick;
sprintf((char *)str, "Hello, world!");
LCD_DisplayStringLine(Line0, str);
}
3. UART串口
cubemx配置

相关变量定义
//main.c
__IO uint32_t uwTick_UART1;
int counter = 0;
char str[40];
u8 rx_buffer;
// uart.c
UART_HandleTypeDef huart1;
// uart.h
#include "main.h"
extern UART_HandleTypeDef huart1;
void UART1_Init(void);
需要自己手写的功能函数
开发板通过串口发送数据,主机接收
// 串口发数据(开发板发送)
void UART1_Proc()
{
//减速
if(uwTick-uwTick_UART1 < 500) return;
uwTick_UART1 = uwTick;
sprintf(str, "%04d : hello\n", counter);
HAL_UART_Transmit(&huart1, (unsigned char *)str, strlen(str), 50);
if(++counter == 10000) counter = 0;
}
主机发送数据,开发板串口接收数据
// stm32g4xx_it.c
extern UART_HandleTypeDef huart1;
void USART1_IRQHandler(void)
{
HAL_UART_IRQHandler(&huart1);
}
// mian.c
int main(){
// ...初始化等等
// 开中断
HAL_UART_Receive_IT(&huart1, &rx_buffer, 1);
while(1){
// ...
}
}
// 串口接收中断回调函数 【重要 需要记住名称】
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
// 功能 ...
HAL_UART_Receive_IT(&huart1, &rx_buffer, 1); // 结尾需要重新开中断
}
如果串口中断函数中用到了HAL_Delay进行延时,要注意系统时钟优先级需高于串口中断优先级
4. IIC
比赛时会提供IIC的HAL库代码,直接加到工程里就行,不需要配置cubemx
需要修改i2c-hal.c文件中的I2CWaitACK函数末尾段代码
原来的
SDA_Output_Mode();
SCL_Output(0);
delay1(DELAY_TIME);
return SUCCESS;
修改后
SCL_Output(0);
delay1(DELAY_TIME);
SDA_Output_Mode();
return SUCCESS;
需要自己手动写的功能函数(EEPROM和可编程电阻读写)
4.1 EEPROM 24c02
//24c02的相关代码
//写EEPROM
void iic_24c02_write(unsigned char *pucBuf, unsigned char ucAddr, unsigned char ucNum)
{
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(ucAddr);
I2CWaitAck();
while(ucNum --){
I2CSendByte(*pucBuf++);
I2CWaitAck();
}
I2CStop();
delay1(500);
}
读24c02
//从EEPROM读
void iic_24c02_read(unsigned char *pucBuf, unsigned char ucAddr, unsigned char ucNum)
{
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(ucAddr);
I2CWaitAck();
I2CStart();
I2CSendByte(0xa1);
I2CWaitAck();
while(ucNum --){
*pucBuf++ = I2CReceiveByte();
if(ucNum)
I2CSendAck();
else
I2CSendNotAck();
}
I2CStop();
}
写和读函数连续使用中间需要延时。
// main.c
#include "i2c.h"
//EEPROM的相关变量
unsigned char EEPROM_String1[5] = {0x11, 0x22, 0x33, 0x44, 0x55};
unsigned char EEPROM_String2[5] = {0};
int main(){
// 建议初始化函数写在main函数里靠后的位置,实测会有影响
I2CInit();
// EEPROM测试
iic_24c02_write(EEPROM_String1, 0, 5);
HAL_Delay(1);
iic_24c02_read(EEPROM_String2, 0, 5);
while(1){
LCD_Proc();
}
}
void LCD_Proc(){
// IIC-读写EEPROM测试
sprintf((char*)str, "EE:%02X,%02X,%02X,%02X,%02X",EEPROM_String2[0],EEPROM_String2[1],EEPROM_String2[2],EEPROM_String2[3],EEPROM_String2[4]);
LCD_DisplayStringLine(Line2, str);
}
注意:实际比赛中会考到EEPROM是否为第一次上电的判断问题,请仔细阅读题目相关要求。
4.2 可编程电阻MCP4017 (扩展板)
省赛不用扩展板,可以不看
写MCP4017
//可编程电阻MCP4017的相关代码
//写阻值
void write_resistor(uint8_t value)
{
I2CStart();
I2CSendByte(0x5E);
I2CWaitAck();
I2CSendByte(value);
I2CWaitAck();
I2CStop();
}
读MCP4017
//读阻值
uint8_t read_resistor()
{
uint8_t value;
I2CStart();
I2CSendByte(0x5F);
I2CWaitAck();
value = I2CReceiveByte();
I2CSendNotAck();
I2CStop();
return value;
}
测试代码
// main.c
#include "i2c.h"
//MCP4017相关变量
uint8_t res;
int main(){
I2CInit();
//MCP4017测试
write_resistor(0x10);
res = read_resistor();
while(1){
LCD_Proc();
}
}
void LCD_Proc(){
// IIC-读写可编程电阻 MCP4017
sprintf((char *)str, "RES_K:%5.2fK", 0.7874*res);
LCD_DisplayStringLine(Line3, (uint8_t *)str);
sprintf((char *)str, "VOLTAGE:%6.3fV", 3.3*((0.7874*res)/(0.7874*res+10)));
LCD_DisplayStringLine(Line4, (uint8_t *)str);
}
5. ADC
cubemx配置如下
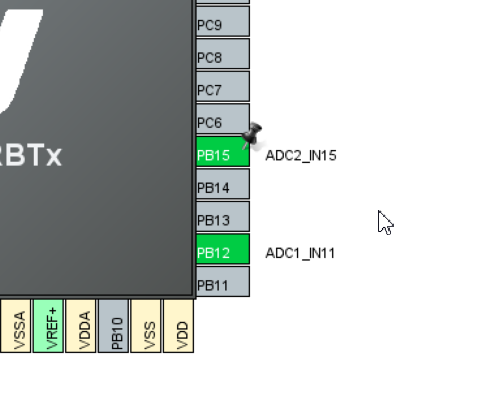
ADC1 通道11 引脚PB12
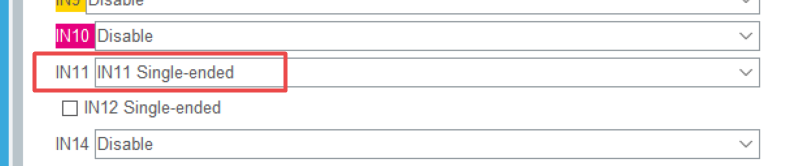
ADC2 通道15 引脚PB15

ADC1和ADC2配置一样(下图要手动改的只有异步时钟 Asy)


延长采样时间

由于ADC时钟设置为异步,因此时钟应该设置为来自PLLP 锁相环

头文件
// adc.h
#include "main.h"
extern ADC_HandleTypeDef hadc1;
void ADC1_Init(void);
void ADC2_Init(void);
uint16_t getADC1(void); // 引脚PB12 R38
uint16_t getADC2(void); // 引脚PB15 R37
需要自己写的相关函数
// adc.c
// 如果使用cubemx工程则直接把两个函数写在main.c里也可
ADC_HandleTypeDef hadc1;
ADC_HandleTypeDef hadc2;
// 获取ADC1的值
uint16_t getADC1(void)
{
uint16_t adc = 0;
HAL_ADC_Start(&hadc1);
adc = HAL_ADC_GetValue(&hadc1);
return adc;
}
// 获取ADC2的值
uint16_t getADC2(void)
{
uint16_t adc = 0;
HAL_ADC_Start(&hadc2);
adc = HAL_ADC_GetValue(&hadc2);
return adc;
}
使用获取到的ADC数值
// main.c 中的 LCD_Proc
void LCD_Proc(){
// ADC测试
sprintf((char *)str, "ADC1-R38:%6.2fV", 3.3*getADC1()/4096.0);
LCD_DisplayStringLine(Line5, (uint8_t *)str);
sprintf((char *)str, "ADC2-R37:%6.2fV", 3.3*getADC2()/4096.0);
LCD_DisplayStringLine(Line6, (uint8_t *)str);
}
// 简单说明
// ADC为12位 2^12=4096 开发板电压为3.3v
// 将3.3V/4096 * 获取到的ADC数值 即为实际电压值
ADC1 对应旋钮R38, ADC2对应旋钮R37
6. TIM
6.1 基本定时器 TIM6/7
说明:这一部分其实没咋用过,考的都是PWM,像题目要求控制LED间隔0.1s闪烁的用系统时钟uwTick参数就足以实现。
CubeMX配置
选择【Activated】使能TIM6, 下方PSC设置分频,ARR设置计数值, 计数模式为up(向上计数)。
TIM6时钟来源为系统时钟(APB2),80MHz分频后为10kHz,计数满1000就触发中断,相当于频率为10Hz,每0.1秒触发一次中断。

不需要配置引脚,但需要配置中断,且中断优先级要改为2

需要手动写的部分
// main.c
#include "tim.h"
int main(){
// ...
TIM6_Init();
HAL_TIM_Base_Start_IT(&htim6); // 开定时器中断,定时器计数到达ARR时中断
}
// 基本定时器TIM6更新中断回调函数【需要记住名字】
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM6){ // 如果用到了多个定时器的中断则需要有该if判断
i++;
HAL_TIM_Base_Start_IT(&htim6); // 中断回调函数结尾一定要再开中断
}
}
// 功能测试
void LCD_Proc(){
// ...
sprintf((char *)Lcd_String, "TIM6_COUNT: %03d", (unsigned int)i);
LCD_DisplayStringLine(Line0, (uint8_t *)Lcd_String);
}
开中断函数 HAL_TIM_Base_Start_IT ,比赛时记不清可以在stm32g4xx_hal_tim.c里ctrl+f搜索start

6.2 通用定时器 TIM2/3/4/15/16/17
6.2.1 测量1路PWM(1路PWM输入)
需要用到定时器的输入捕获模式、从模式
cubemx配置
使用的是TIM3的通道1, 对应引脚PB4
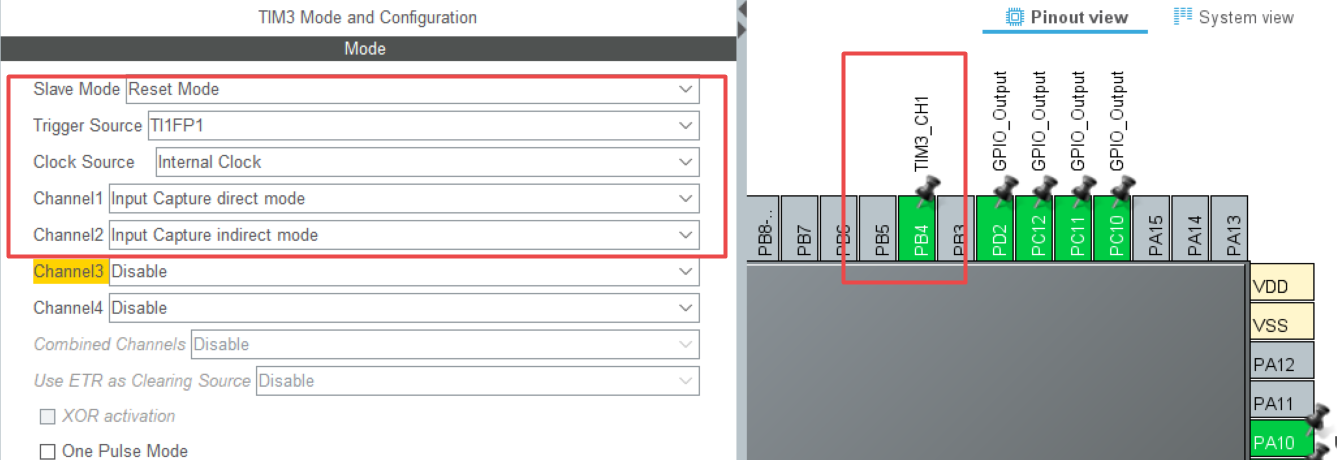
需要使能中断,修改中断优先级

(GPIO要配置为输入复用模式,默认就是不用改)
KEIL
需要自己写的代码
// main.c
#include "tim.h"
// TIM3的PWM输出相关变量
uint16_t PWM1_CNT;
int main(){
// ......
//初始化TIM3 打开中断 并设置定时器输入捕获
TIM3_Init();
HAL_TIM_Base_Start(&htim3);
HAL_TIM_IC_Start_IT(&htim3, TIM_CHANNEL_1);
}
//TIM3输入捕获中断回调函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM3){
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
PWM1_CNT = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1)+1;
}
}
}
// 测试代码
void LCD_Proc(){
// PWM输入测试
sprintf((char *)str, "PWM1_COUNT:%06d", (unsigned int)1000000/PWM1_CNT);
LCD_DisplayStringLine(Line7, (uint8_t *)str);
}
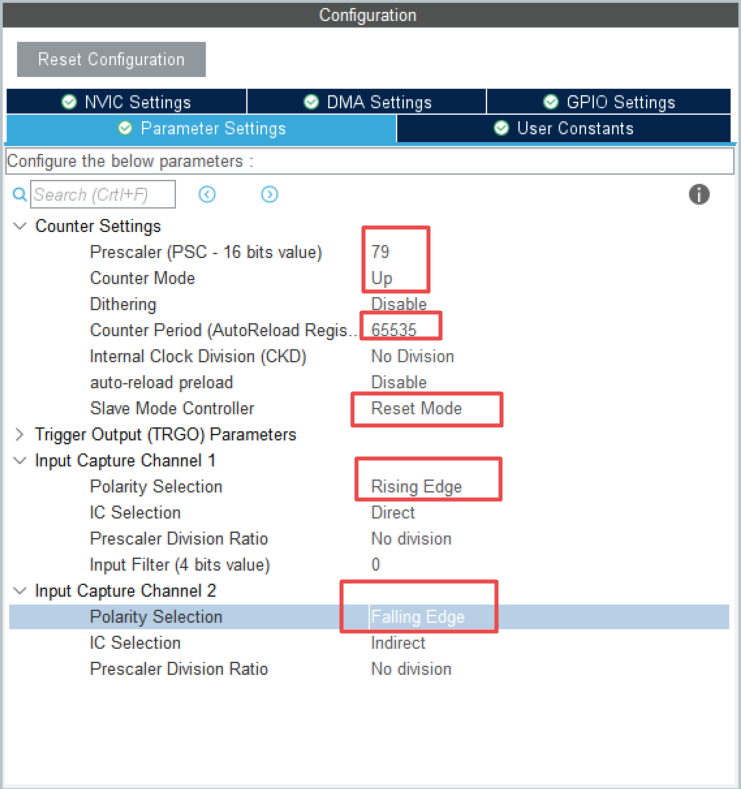
6.2.2 测量2路PWM频率和占空比
cubemx配置
这里和测量1路PWM的一样,TIM3的部分不再赘述
配置第二路 TIM2, 引脚为PA15

参数配置

同样需要开中断,修改中断优先级

需要手打的部分
// main.c
#include "tim.h"
//PWM1相关变量
uint16_t PWM1_CNT;
uint16_t PWM2_CNT;
uint16_t PWM1_DUTY;
uint16_t PWM2_DUTY;
float PWM1_DR;
float PWM2_DR;
int main(){
// .....
//初始化TIM3 打开中断 并设置定时器输入捕获
TIM3_Init();
HAL_TIM_Base_Start(&htim3);
HAL_TIM_IC_Start_IT(&htim3, TIM_CHANNEL_1);
//初始化TIM2 二路PWM通道输入
TIM2_Init();
HAL_TIM_Base_Start(&htim2);
HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_1);
HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_2);
}
// 定时器输入捕获中断回调函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM2)
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
PWM2_CNT = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1)+1;
PWM2_DR = (float)PWM2_DUTY/PWM2_CNT;
}
else if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2)
{
PWM2_DUTY = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_2)+1;
}
}
if(htim->Instance == TIM3)
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
PWM1_CNT = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1)+1;
PWM1_DR = (float)PWM1_DUTY/PWM1_CNT;
}
else if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2)
{
PWM1_DUTY = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_2)+1;
}
}
}
void LCD_Proc(){
// PWM输入测试
sprintf((char *)str, "PWM1:%6d,%4.2f%%", (unsigned int)1000000/PWM1_CNT, PWM1_DR*100);
LCD_DisplayStringLine(Line7, (uint8_t *)str);
sprintf((char *)str, "PWM2:%6d,%4.2f%%", (unsigned int)1000000/PWM2_CNT, PWM2_DR*100);
LCD_DisplayStringLine(Line8, (uint8_t *)str);
}
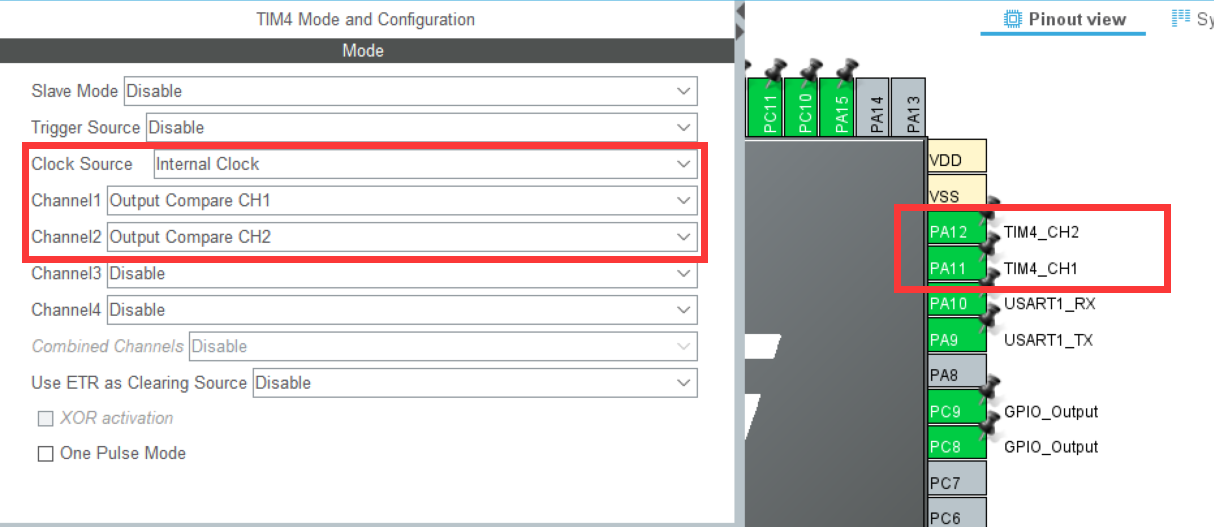
6.2.3 方波输出
可以使用一个定时器的两个通道输出两个不同频率的方波
cubemx配置
此处使用TIM4的通道1和通道2,引脚对应PA11、PA12
参数配置

需要使能中断,修改中断优先级

需要手打的部分
// main.c
#include "tim.h"
int main(){
// ...
//初始化TIM4 输出方波
TIM4_Init();
HAL_TIM_Base_Start(&htim4);
HAL_TIM_OC_Start_IT(&htim4, TIM_CHANNEL_1);
HAL_TIM_OC_Start_IT(&htim4, TIM_CHANNEL_2);
}
// 定时器输出比较中断回调函数【方波】
void HAL_TIM_OC_DelayElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM4)
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
__HAL_TIM_SET_COMPARE(htim, TIM_CHANNEL_1,(__HAL_TIM_GetCounter(htim)+100)); // 5kHZ
}
else if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2)
{
__HAL_TIM_SET_COMPARE(htim, TIM_CHANNEL_2,(__HAL_TIM_GetCounter(htim)+500)); // 1kHZ
}
}
}
6.2.4 输出2路PWM
cubemx配置
第一路PWM输出, 定时器TIM17通道1, 引脚PA7

参数配置

无需使能中断
第二路PWM输出配置, TIM16通道1, 引脚PA6。配置和第一路一致。

参数配置
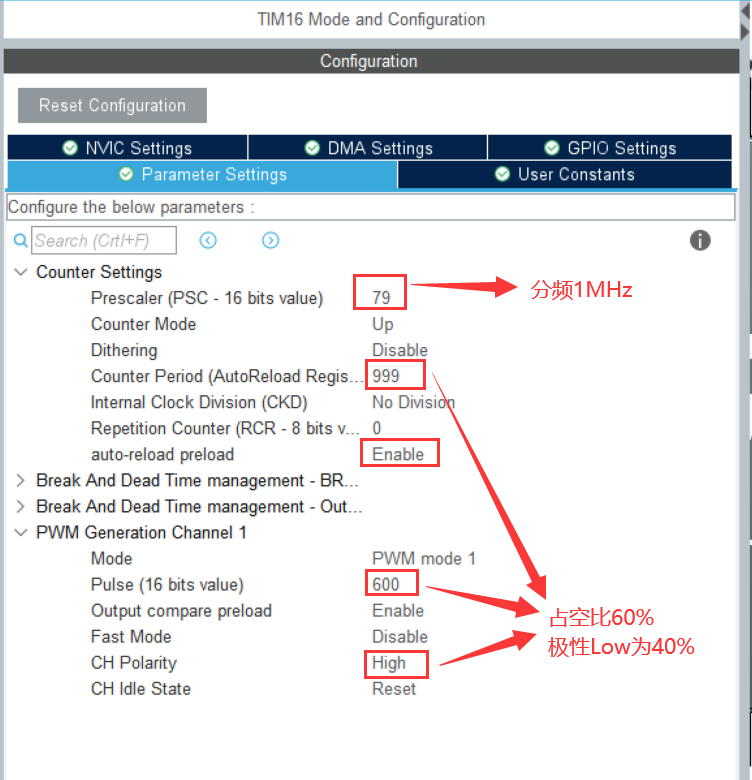
同样无需使能中断
需要手打的部分
// main.c
int main(){
// TIM16 PWM输出
HAL_TIM_Base_Start(&htim16);
HAL_TIM_OC_Start_IT(&htim16, TIM_CHANNEL_1); // PA6
// TIM17 PWM输出
HAL_TIM_Base_Start(&htim17);
HAL_TIM_OC_Start_IT(&htim17, TIM_CHANNEL_1); // PA7
}
其他
// 修改占空比/频率通常用到以下两个函数
__HAL_TIM_SET_AUTORELOAD(&htim16, arr); // 控制频率 arr即自动重装载数值
__HAL_TIM_SET_COMPARE(&htim16, TIM_CHANNEL_1, pulse); //控制占空比 pulse/arr即为占空比
6.3 高级定时器 TIM1/8
用通用的就够了,一般用不上高级的
7. RTC 时钟
cubemx配置
使能RTC时钟和日历

配置时钟树 时钟来自外部晶振(可以看到分频后为750kHZ, 之后还要分频成1HZ)
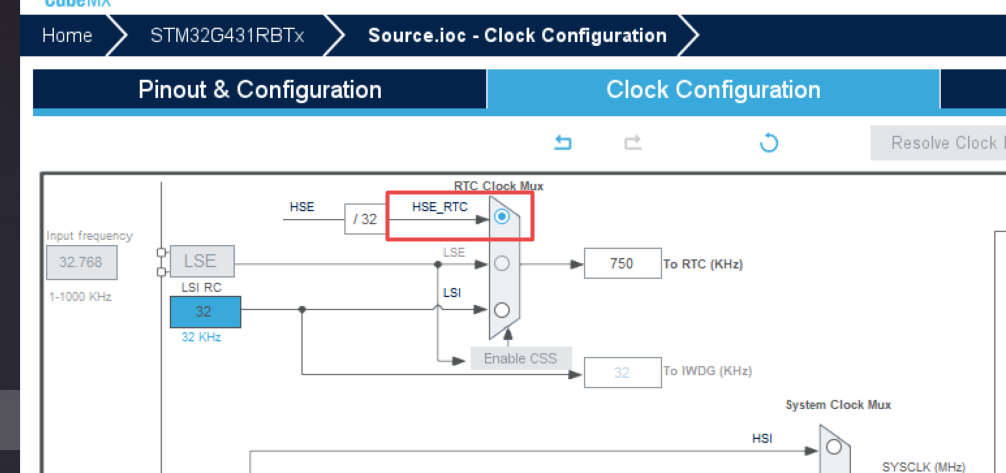
配置分频
750k/125/6000 = 1HZ
时分秒的初始值可以在此设置
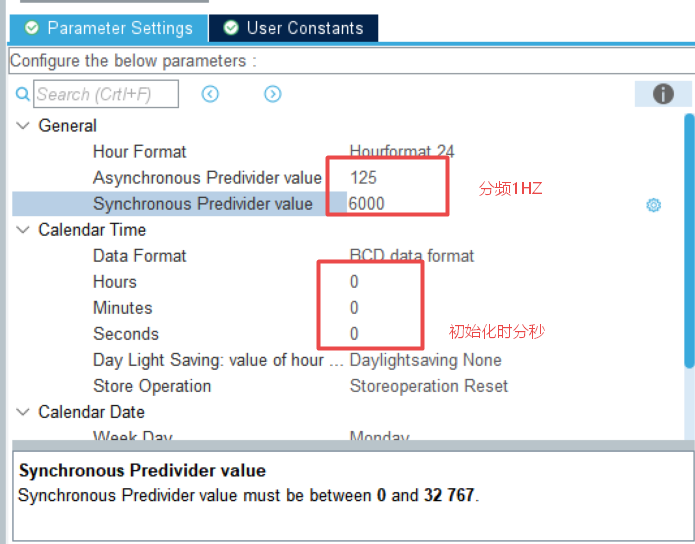
日期也可初始化(年的数值范围是0-99)

RTC模块的使用(需手打代码)
// main.c
//RTC专用变量
RTC_TimeTypeDef time;
RTC_DateTypeDef date;
uint8_t second;
void LCD_Proc(){
// ...
// RTC 测试
second = time.Seconds;
// 直接调用HAL库函数即可,获取时间和日期的两个函数【!必须同时使用】,否则会出现bug
HAL_RTC_GetTime(&hrtc, &time, RTC_FORMAT_BCD);
HAL_RTC_GetDate(&hrtc, &date, RTC_FORMAT_BCD);
if(second != time.Seconds){
sprintf((char*)str, "%02x:%02x:%02x", time.Hours, time.Minutes, time.Seconds);
LCD_DisplayStringLine(Line0, (uint8_t *)str);
sprintf((char*)str, "20%02x-%02x-%02x", date.Year, date.Month, date.Date);
LCD_DisplayStringLine(Line1, (uint8_t *)str);
}
}
经验分享
关于是否要买教程这件事
个人觉得,如果之前有stm32开发基础且备赛时间比较多的人可以不买教程完全自学,主要学cubemx的使用,当然买教程也是可以的,买教程相当于是花钱省了自己找资料的时间。
我备赛是买了蚂蚁工厂的教程,只跟了基础部分,模板创建部分快速的略过了。因为今年国赛比较特殊,没考扩展板,所以后面扩展板创建和国赛模板创建的部分我都没看。如果跟蚂蚁的教程走的话,不建议完全参考他使用移植的方法,参考思路就好,直接用cubemx生成的工程就可以了,代码写在begin和end之间就不会被覆盖。
如果要用移植的方法,这里有一些函数比如MspInit之类的,实际也要一起移植(移植真的又慢又麻烦,没必要)
比赛相关
省赛会考的内容就是以上模板创建提到的那些,屏幕+LED+按键这仨是必考,这一块的模板创建必须烂熟于心(其实所有内容都要记下来)。其他要注意的就是PWM输出这一部分,这是省赛最常考的,要熟悉PWM输出的频率和占空比调节,练习的时候没有示波器的人可以网购个逻辑分析仪,不用太贵的能用就行,我用的NanoDLA(30元左右),当然能用示波器的还是用示波器,比逻辑分析仪舒服多了。其他的比如I2C和串口就是死记,用法都大差不差,建议有时间的把往年省赛题都做一遍,多练练模板。
今年国赛没用扩展板,理论上考的内容也是省赛的那些,综合性和难度要强一节,基本上述模板的所有模块都考到了,因为我也没拿好成绩,所以就不多说了。
另外客观题(15分 程序85)我基本都是蒙的所以也不好给出建议。客观考的范围很宽泛,数电、模电、开发板相关的等等,主要靠自己积累,开发板相关的赛时可以看官方发的资料进行查找,争国一的还是最好多做准备。
建议比赛前一天晚上保证良好的睡眠和比较好的精神状态,这一点还挺重要的,好的状态对编程思路有很大的帮助。我省赛和国赛时完全是两个状态,我因为国赛撞了期末就没准备蓝桥杯,当时又焦虑又疲惫,比完还以为白给了,最后混到了国三。如果我以我国赛的状态去比省赛肯定就白给了。
其他要注意的就是如果跟我一样是线上比赛的,比赛要保证网络畅通,前置摄像头对准自己,这样自己偶尔回头能看到自己的手机屏幕,就能知道自己有没有掉线了,偶尔卡顿监考老师不会说什么。比赛要用Chrome浏览器的ACMcoder插件,安装好赛前几天需要上线测试,官网下载的准考证上会有相关注意事项,跟着官方的要求做就行。
调试的时候发现自己的代码写好了屏幕没反应不要着急,先按复位键看看,经常有人忘记设置Keil工程的“Reset and Run”配置项,以为自己代码出问题。实际比赛中是一定要配置好Keil工程的这一项的。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号