0 写在前面
只有走在路上,才能摆脱局限、摆脱执着,让所有的选择、探寻、猜测、想象都生机勃勃。——余秋雨《文化苦旅》
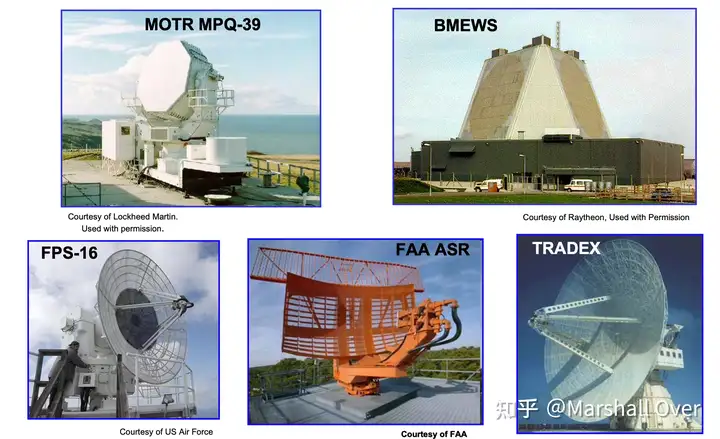
1 基本介绍
跟踪雷达:
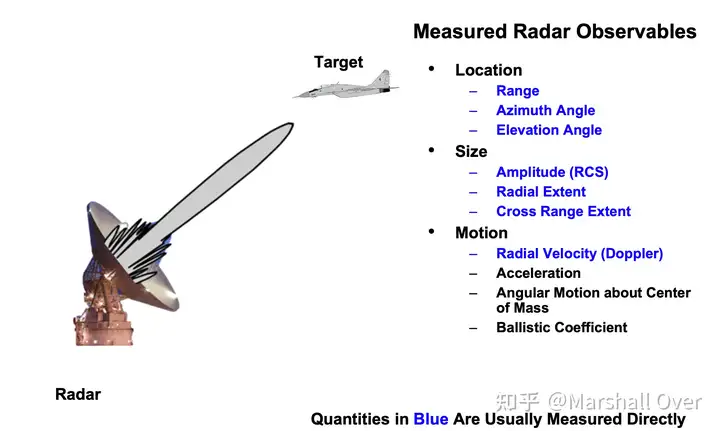
雷达参数估计:
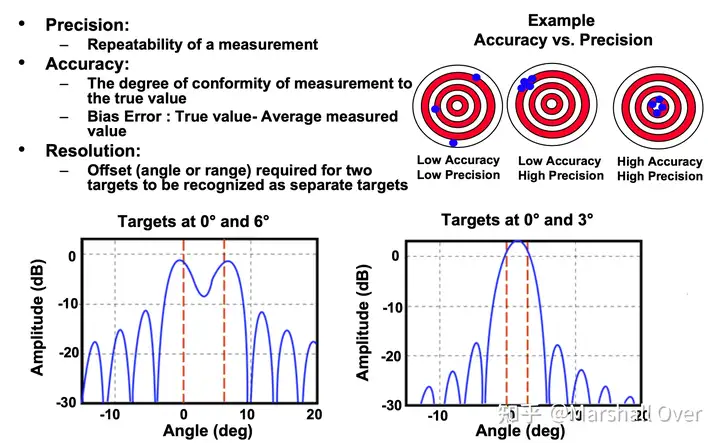
准确度、精度和分辨率:
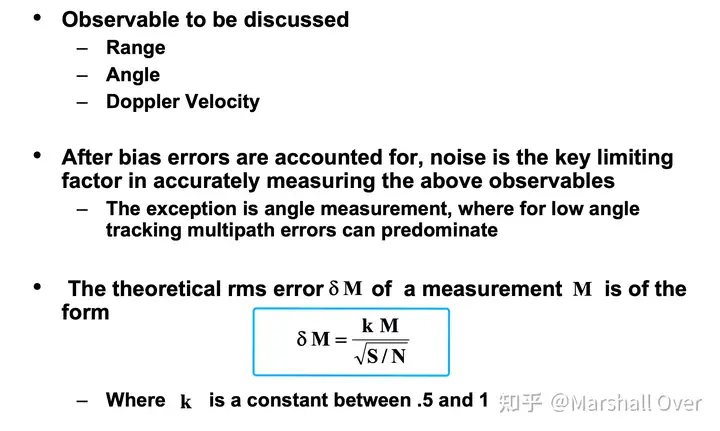
2 Observable Estimation
Observable Accuracy:
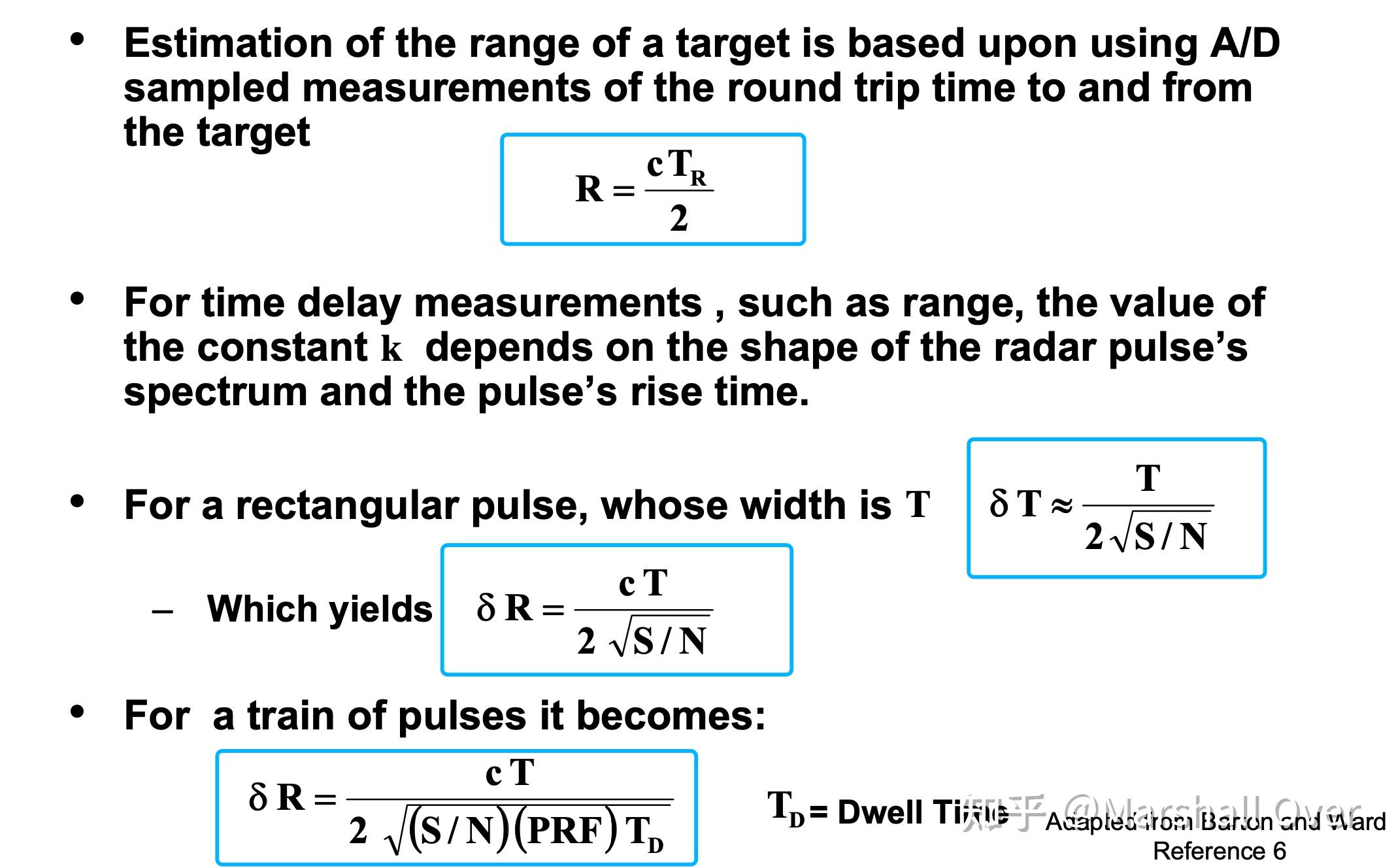
Limitations on Range Estimation:
Theoretical vs. Practical Accuracy Limitations:
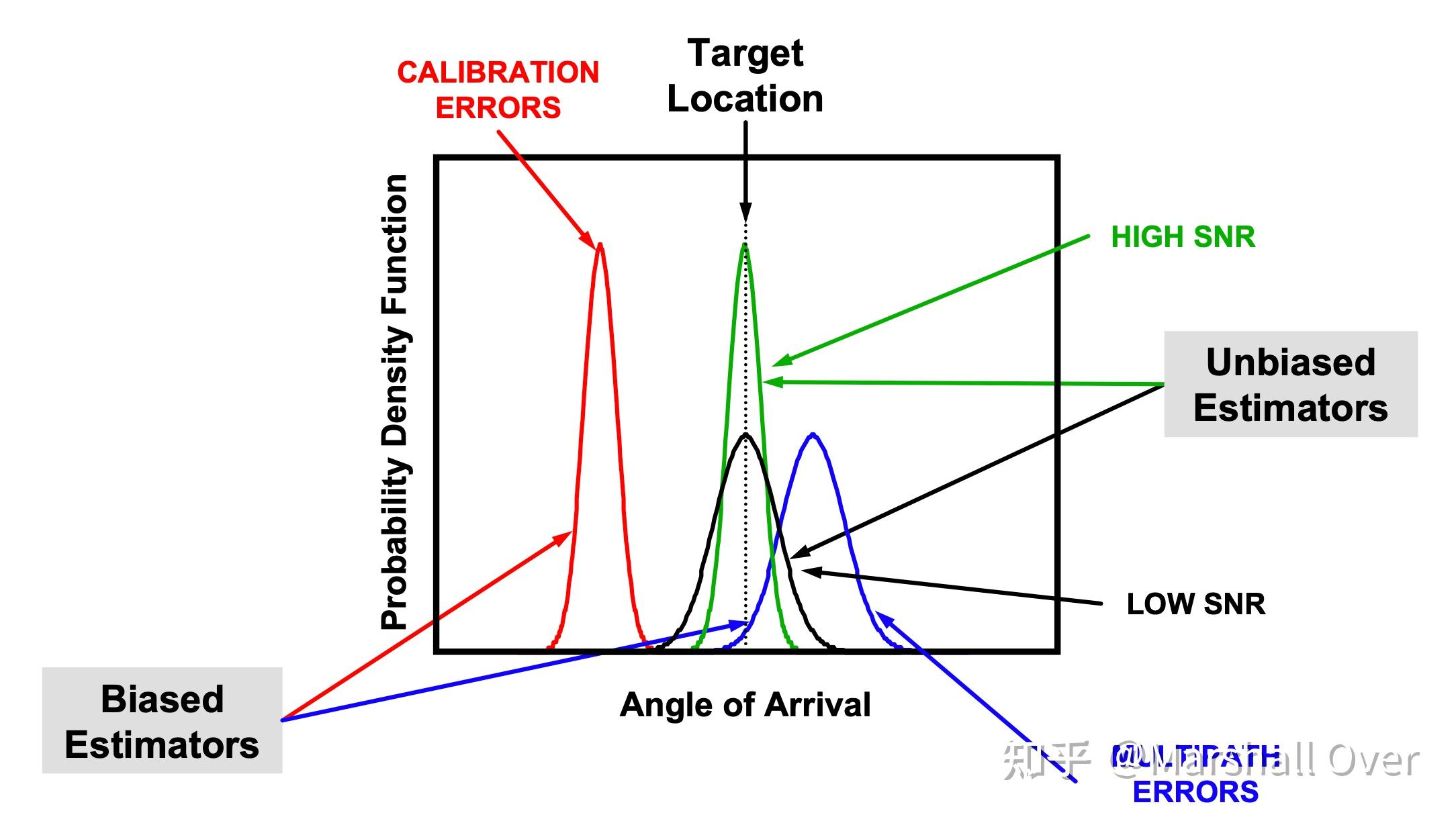
Angle Estimation Issues:
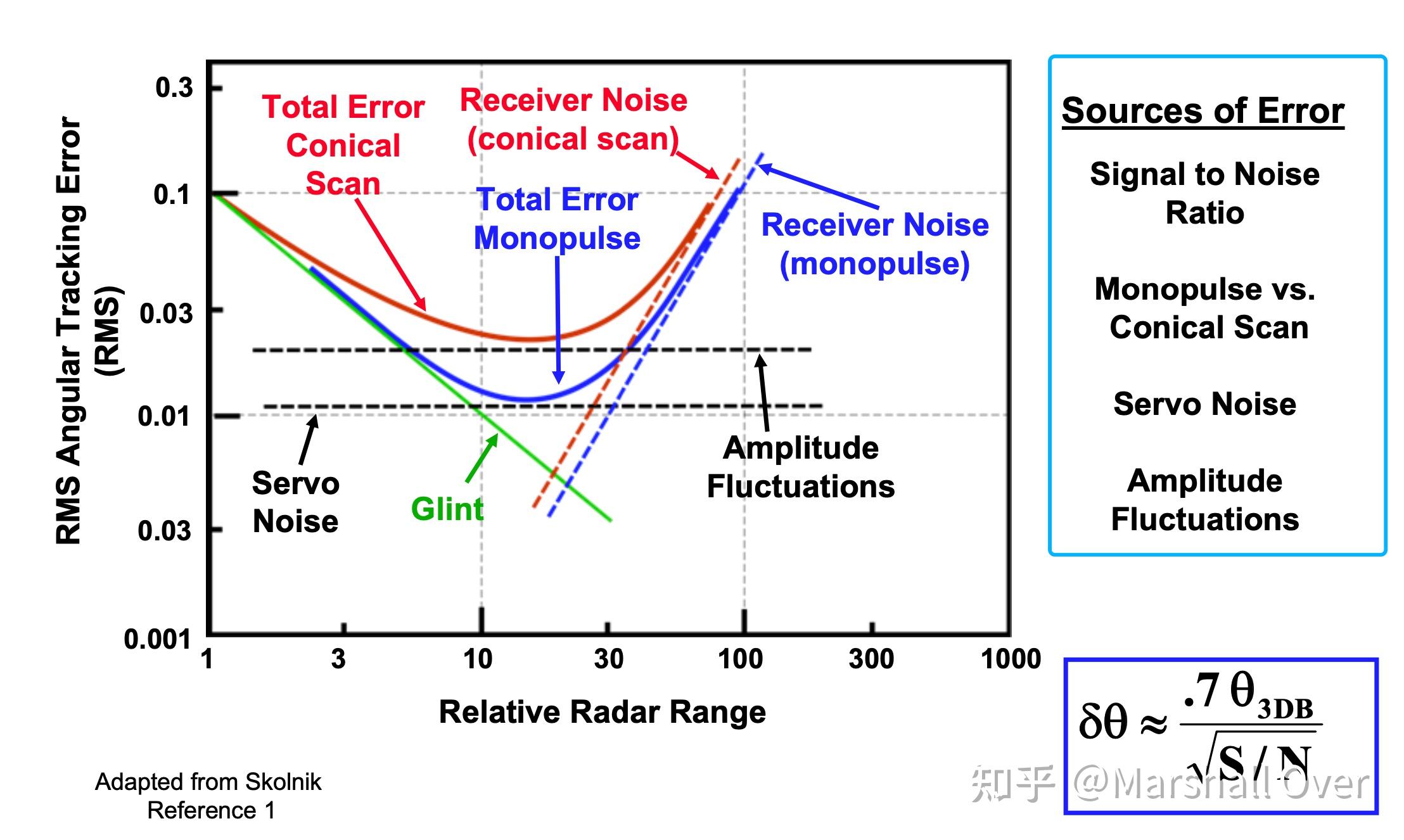
Limitation on Angle Estimation:
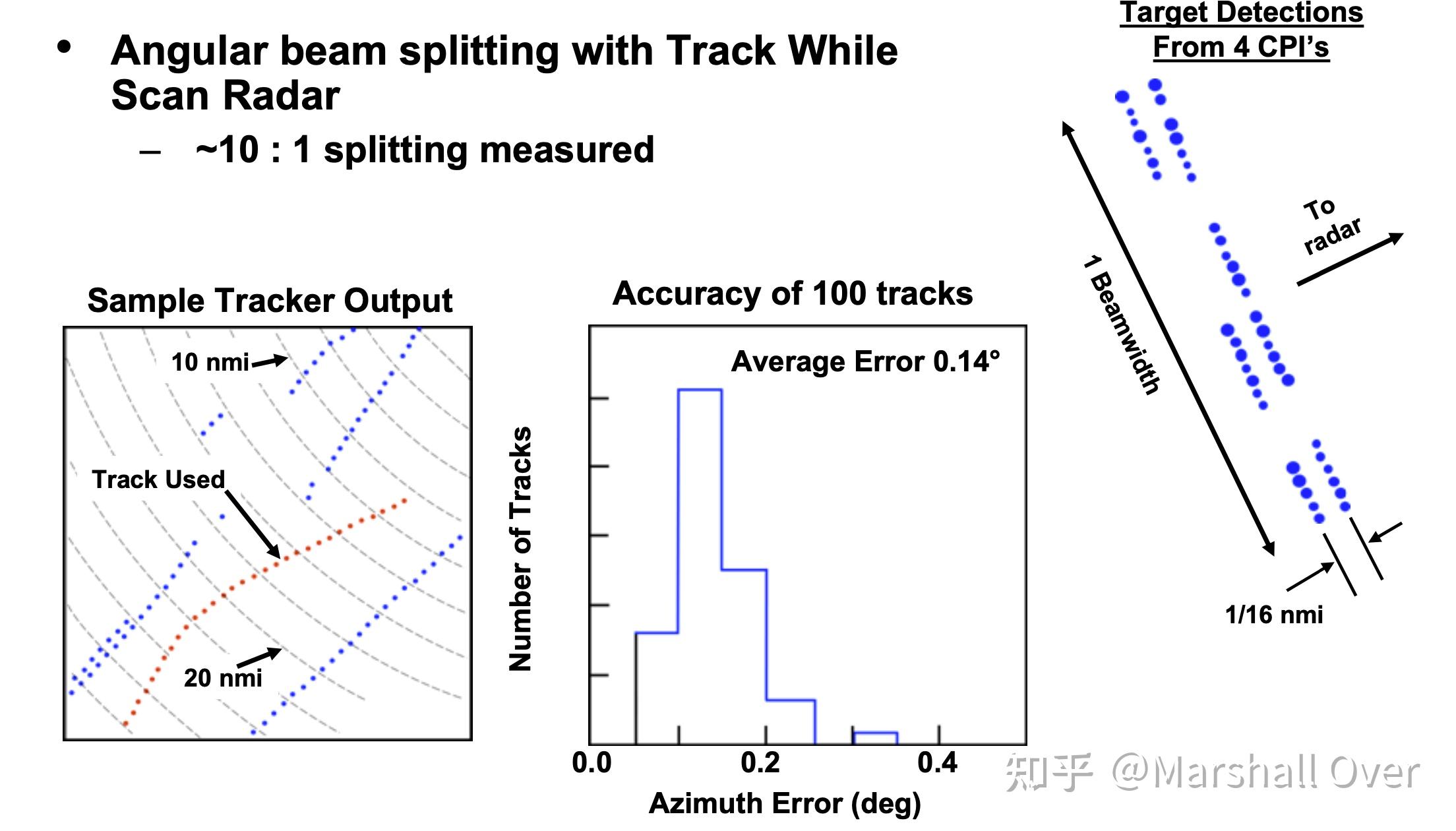
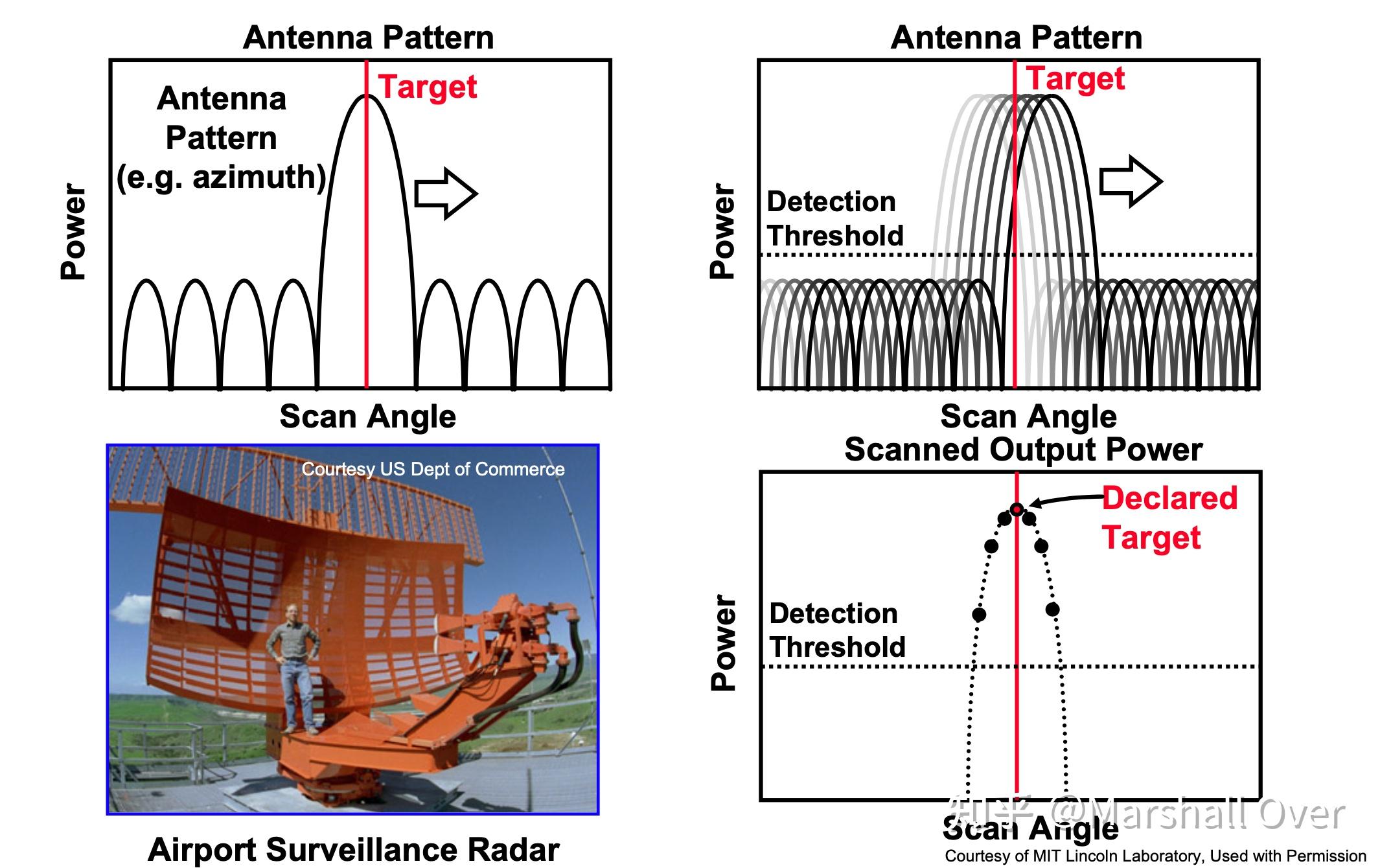
Angular Accuracy with ASR Radar:
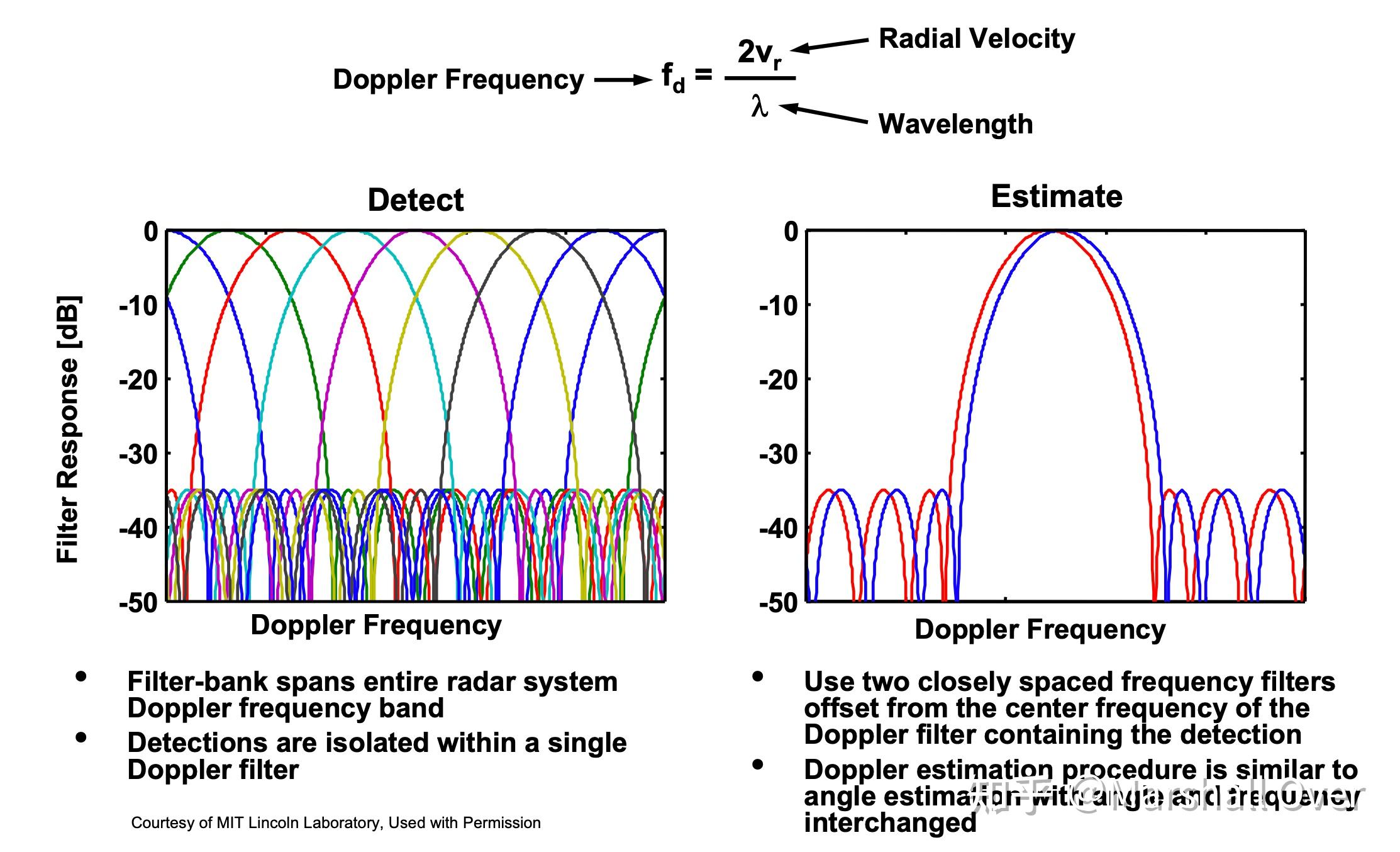
Doppler Estimation:
Radar Cross Section Measurement Accuracy):
3 单目标跟踪
3.1 角跟踪技术
3.1.1 比幅单脉冲
Single Target Tracking - General:
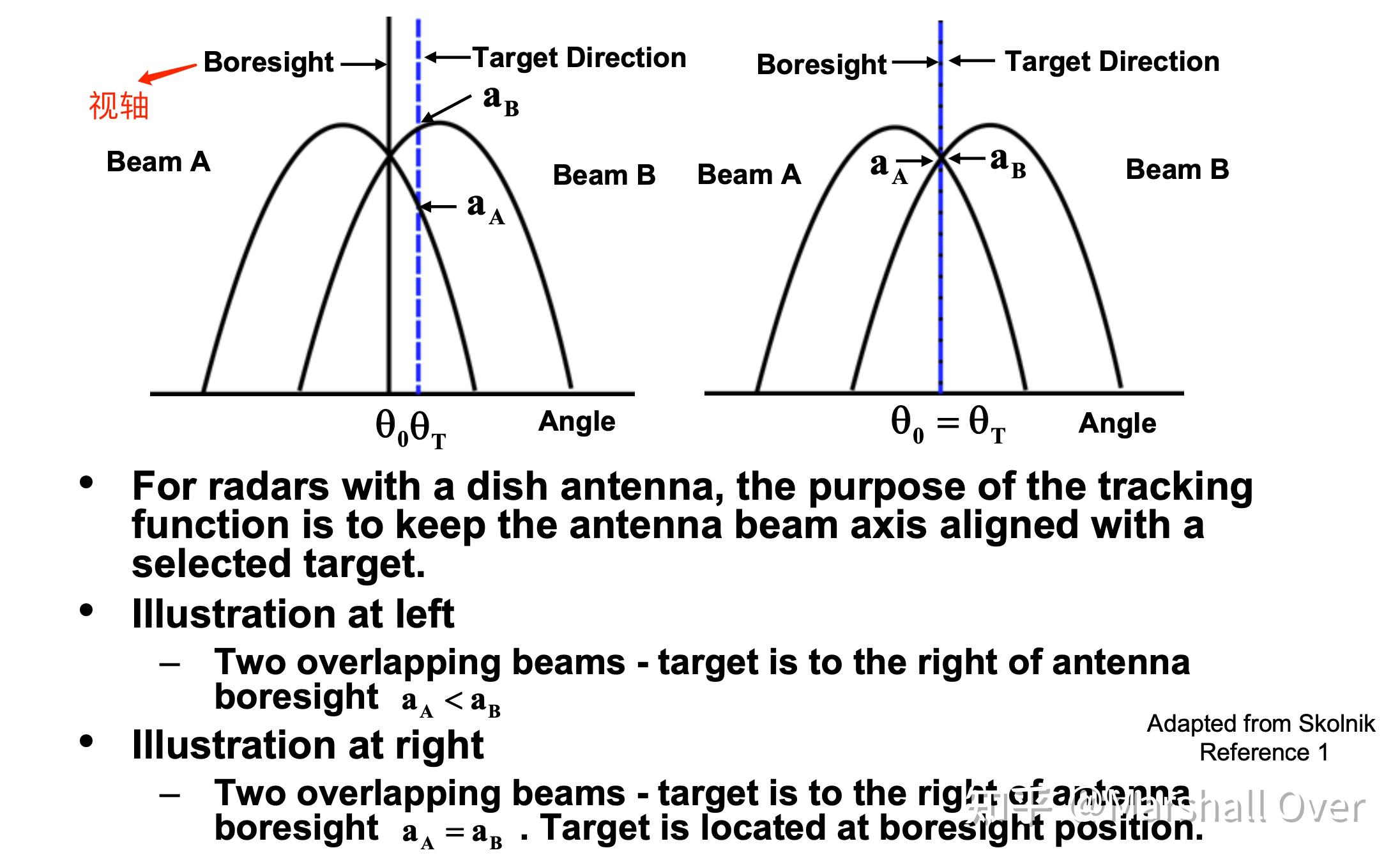
Basics of Continuous Angle Tracking:
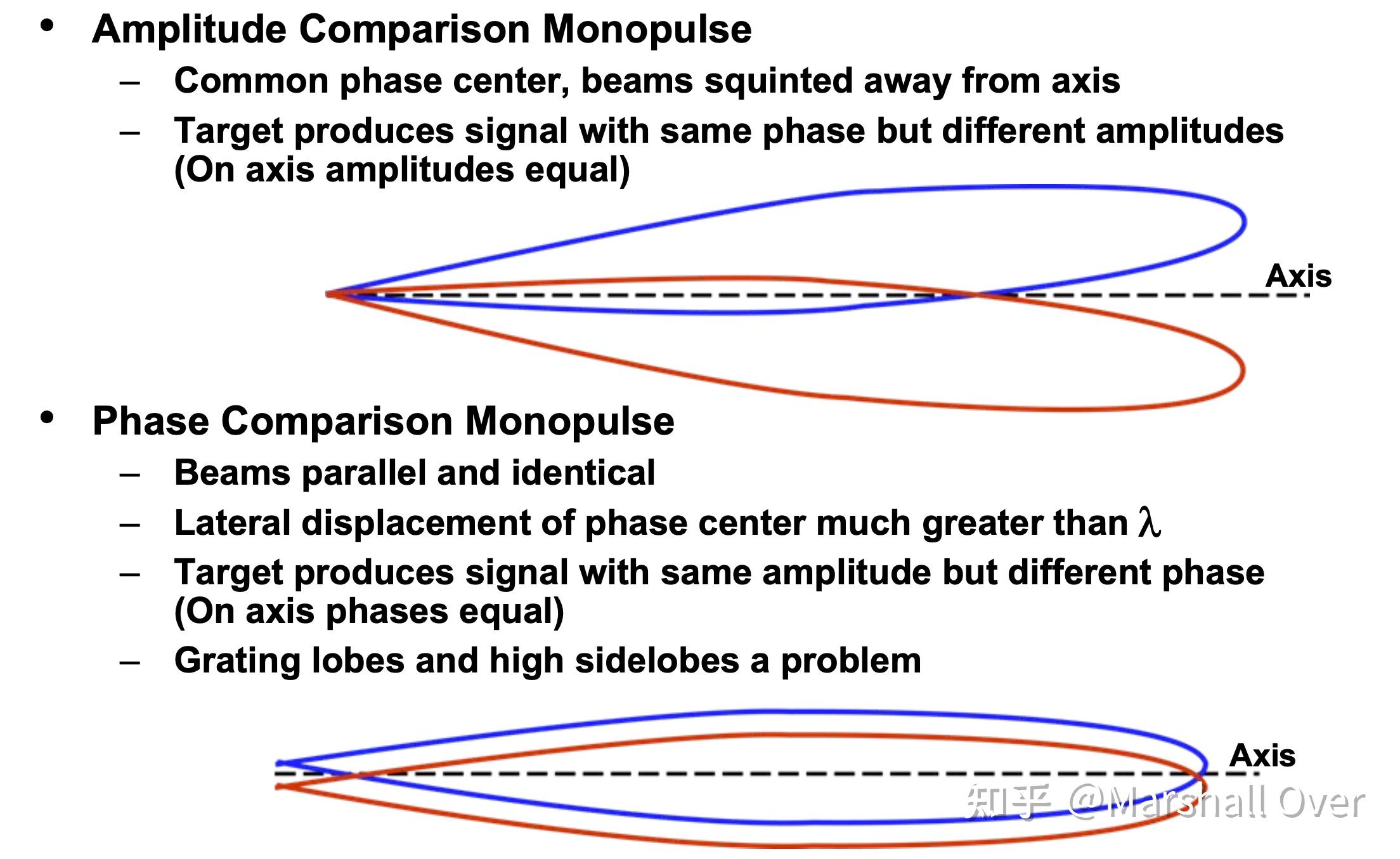
Amplitude Comparison Monopulse:
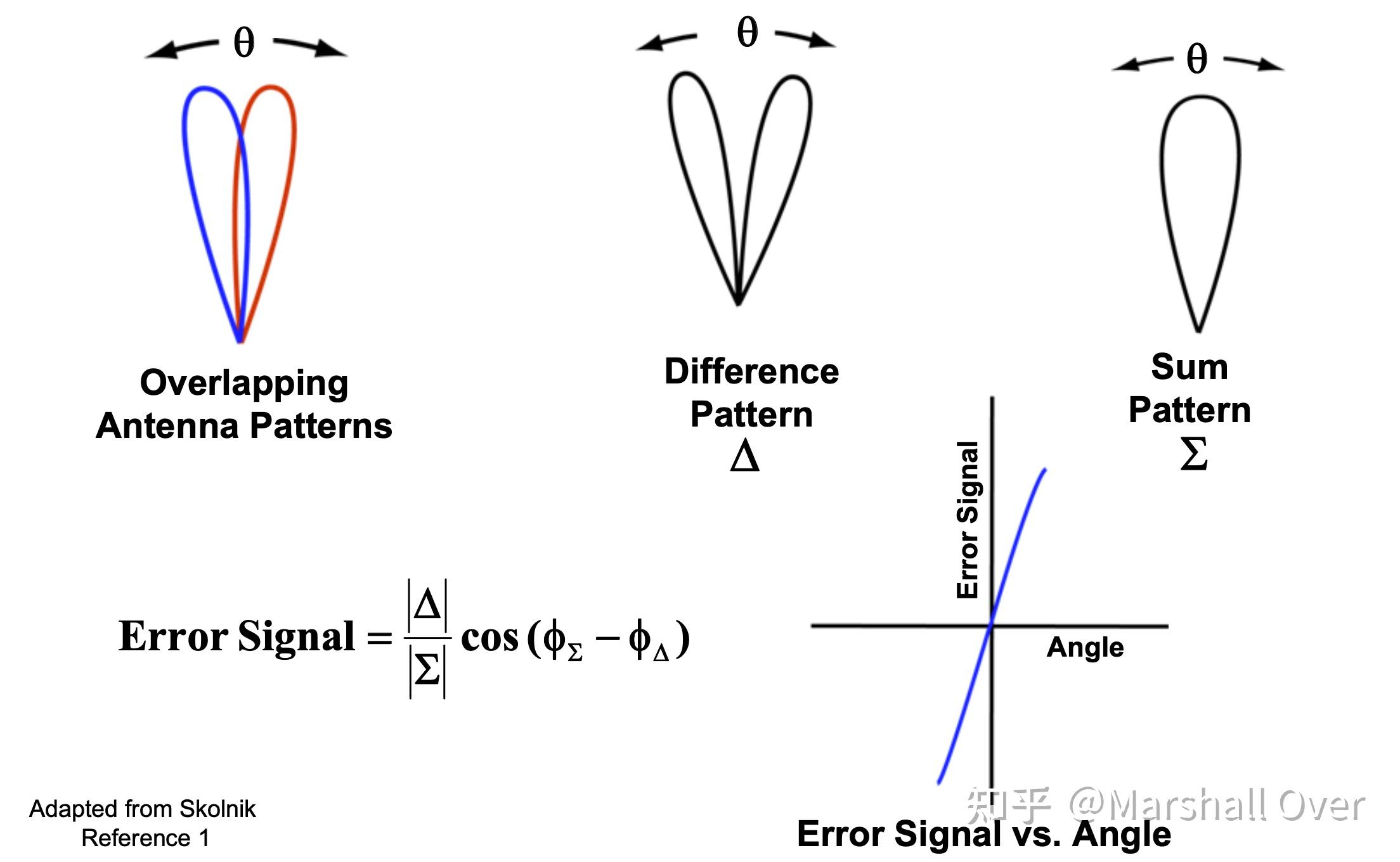
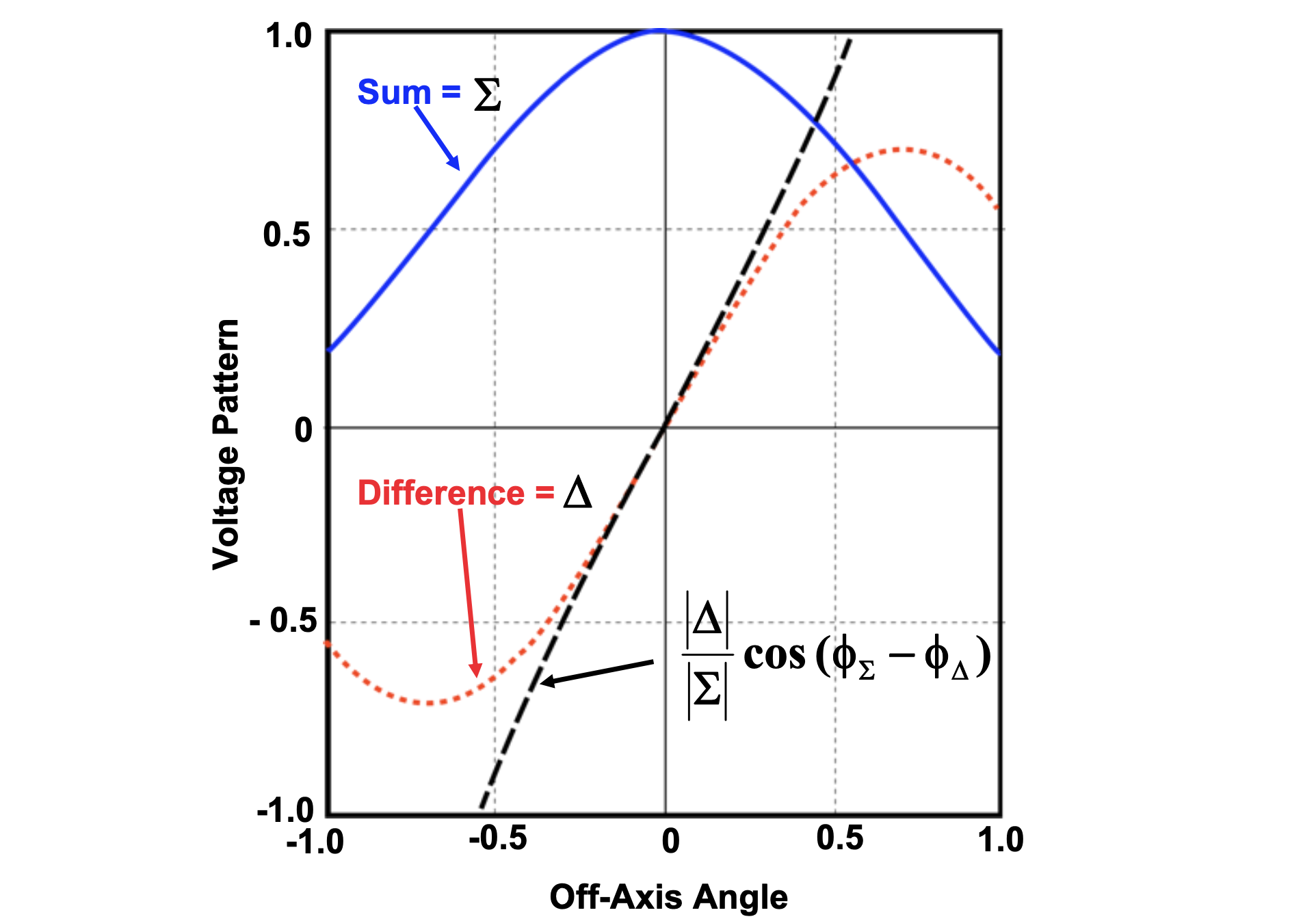
Monopulse Antenna Patterns and Error Signals:
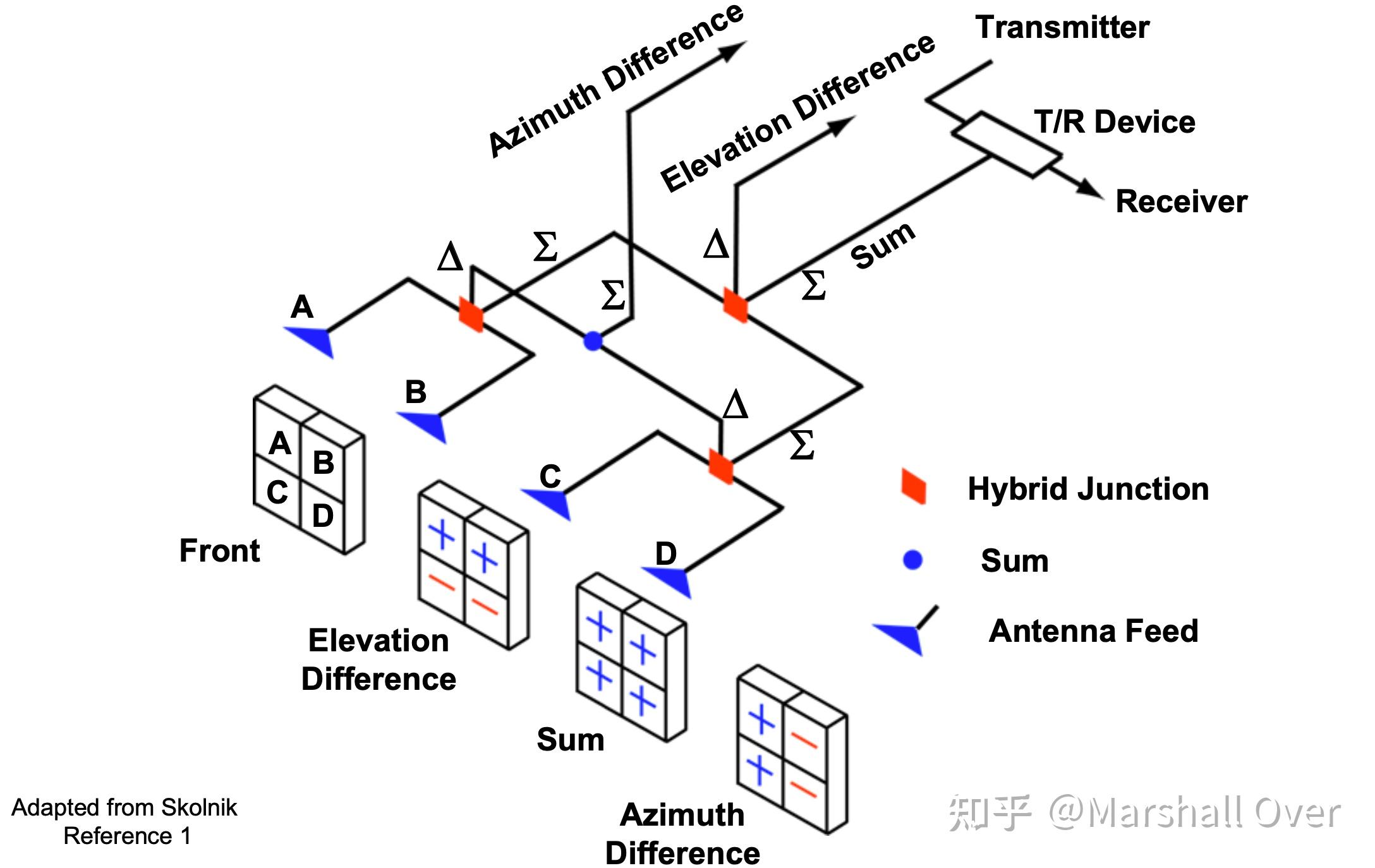
Four Horn Monopulse Block Diagram:
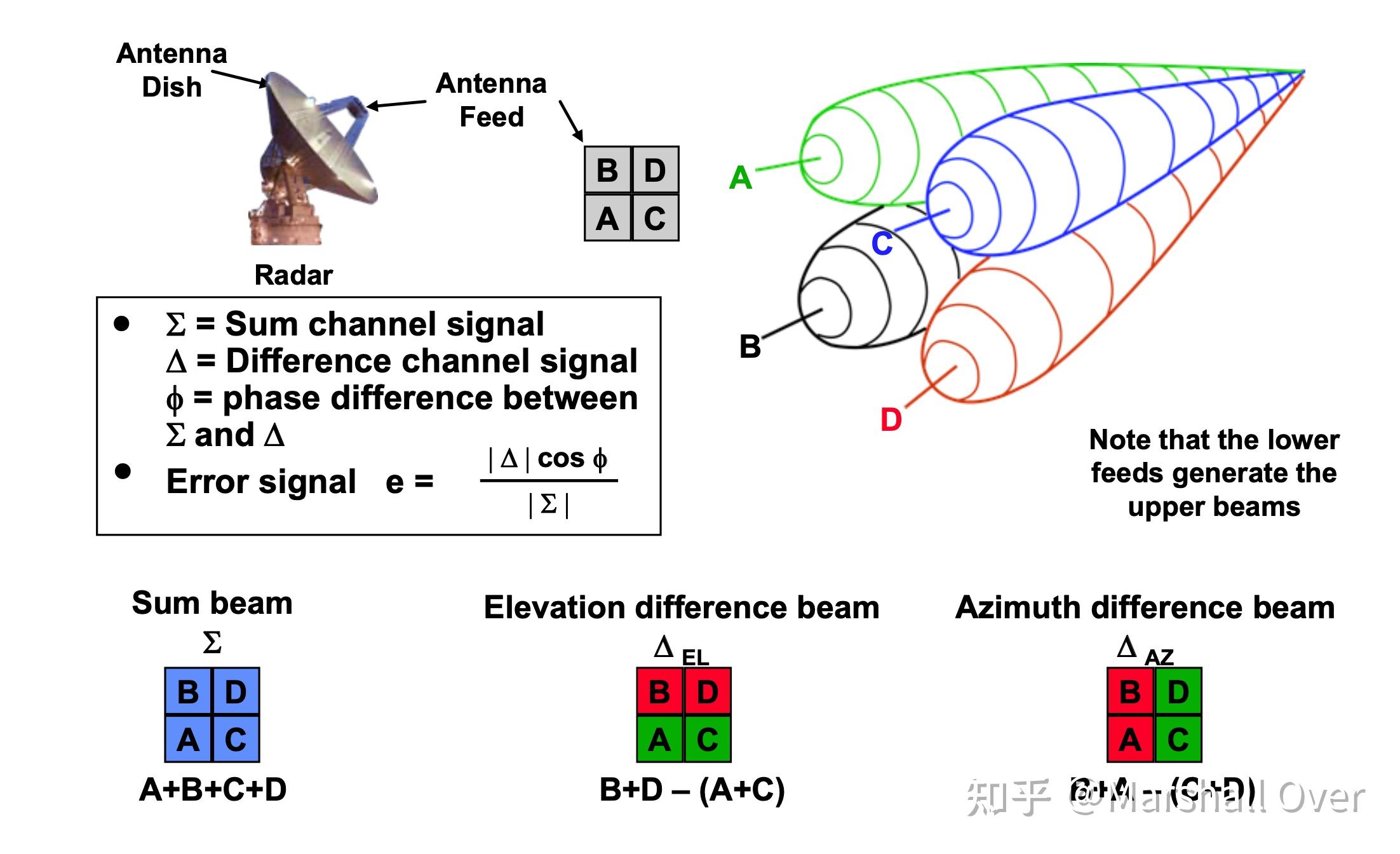
Two Dimensional- Four Horn Monopulse:
Monopulse Error Pattern:
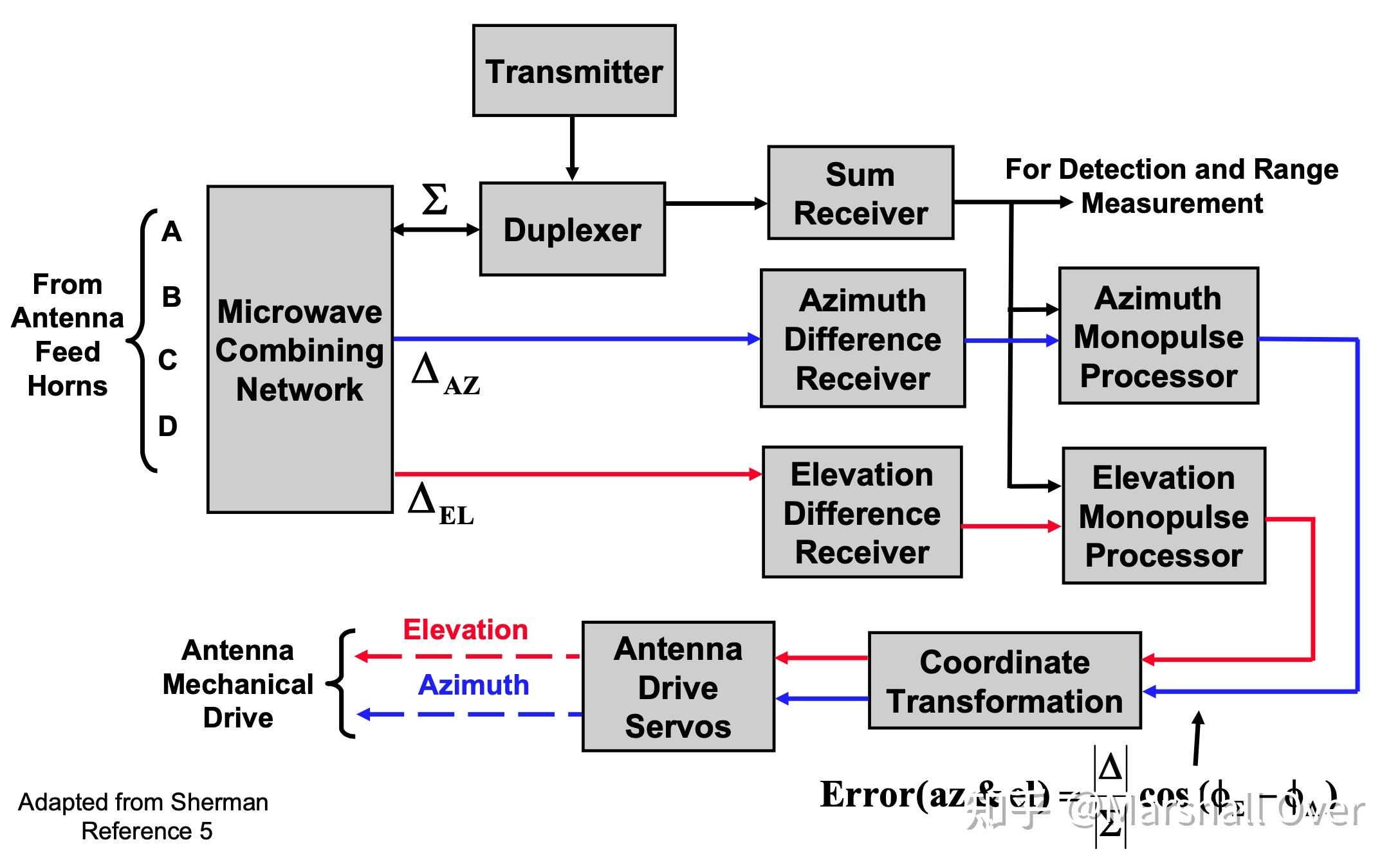
Functional Diagram of Monopulse Radar:
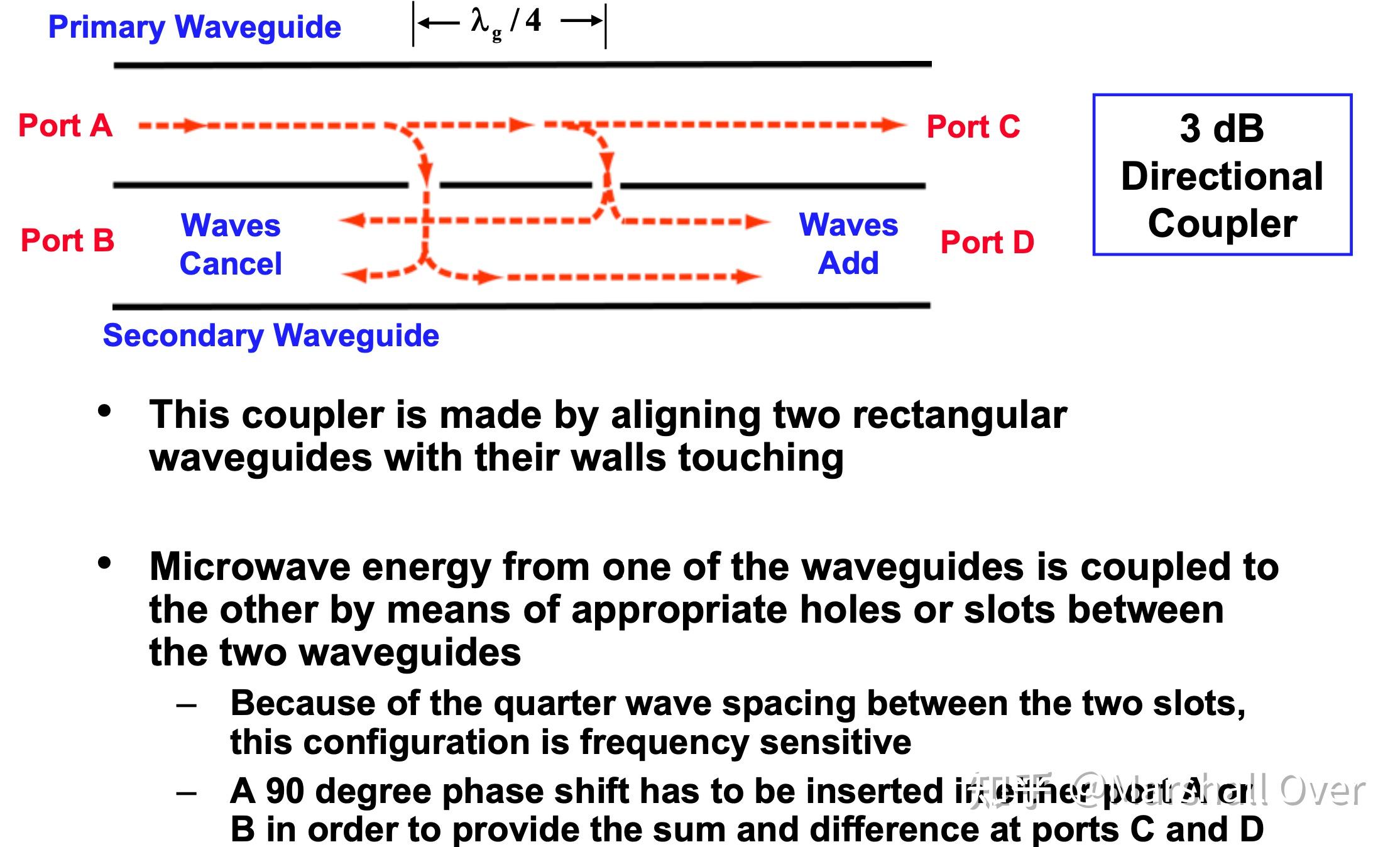
Microwave Combining Network:
Three Types of Hybrid Junctions:
Hybrid Junctions for Monopulse Radars:
Hybrid Junctions Used in Monopulse Radar:
Hybrid Junctions Used in Monopulse Radar:
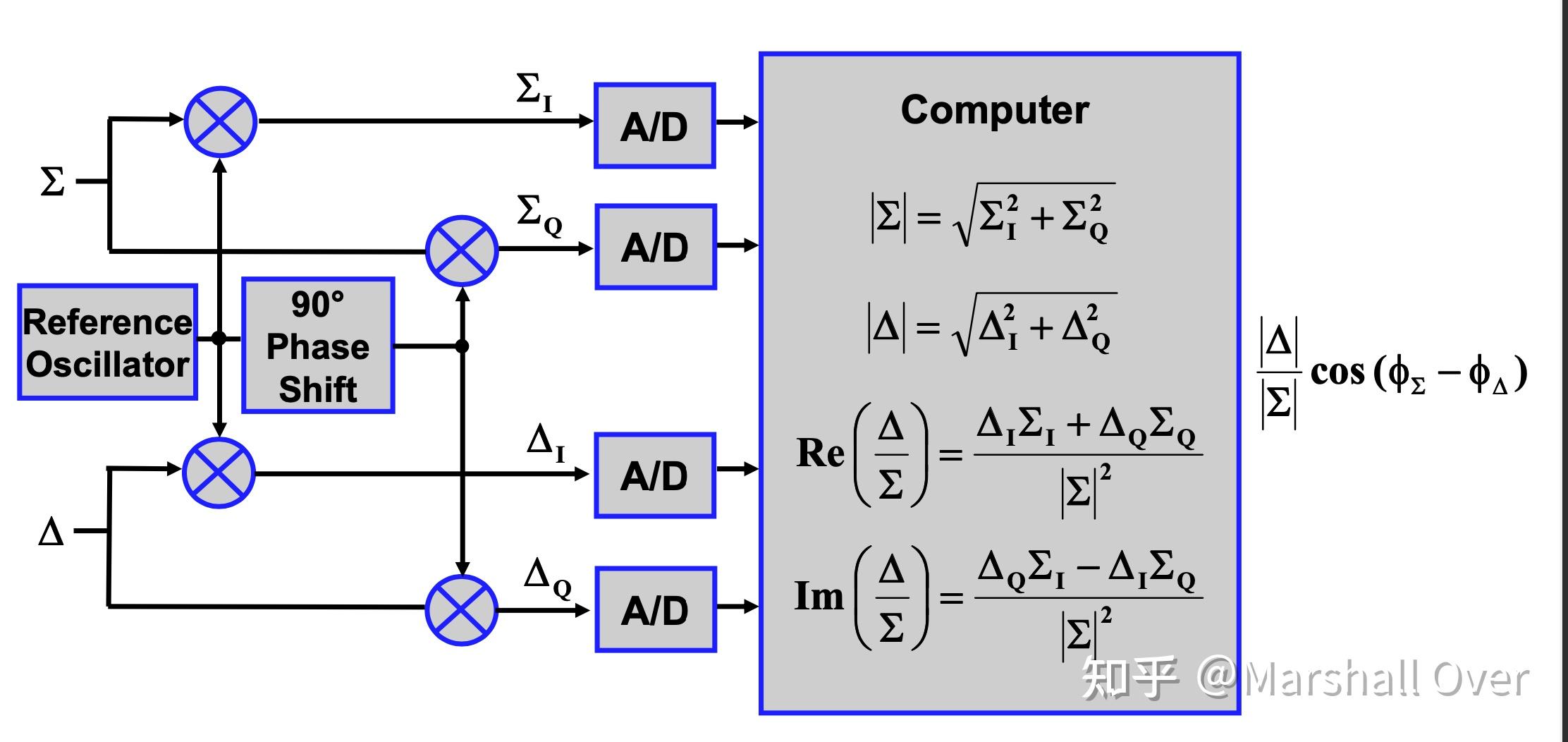
Monopulse Processor:
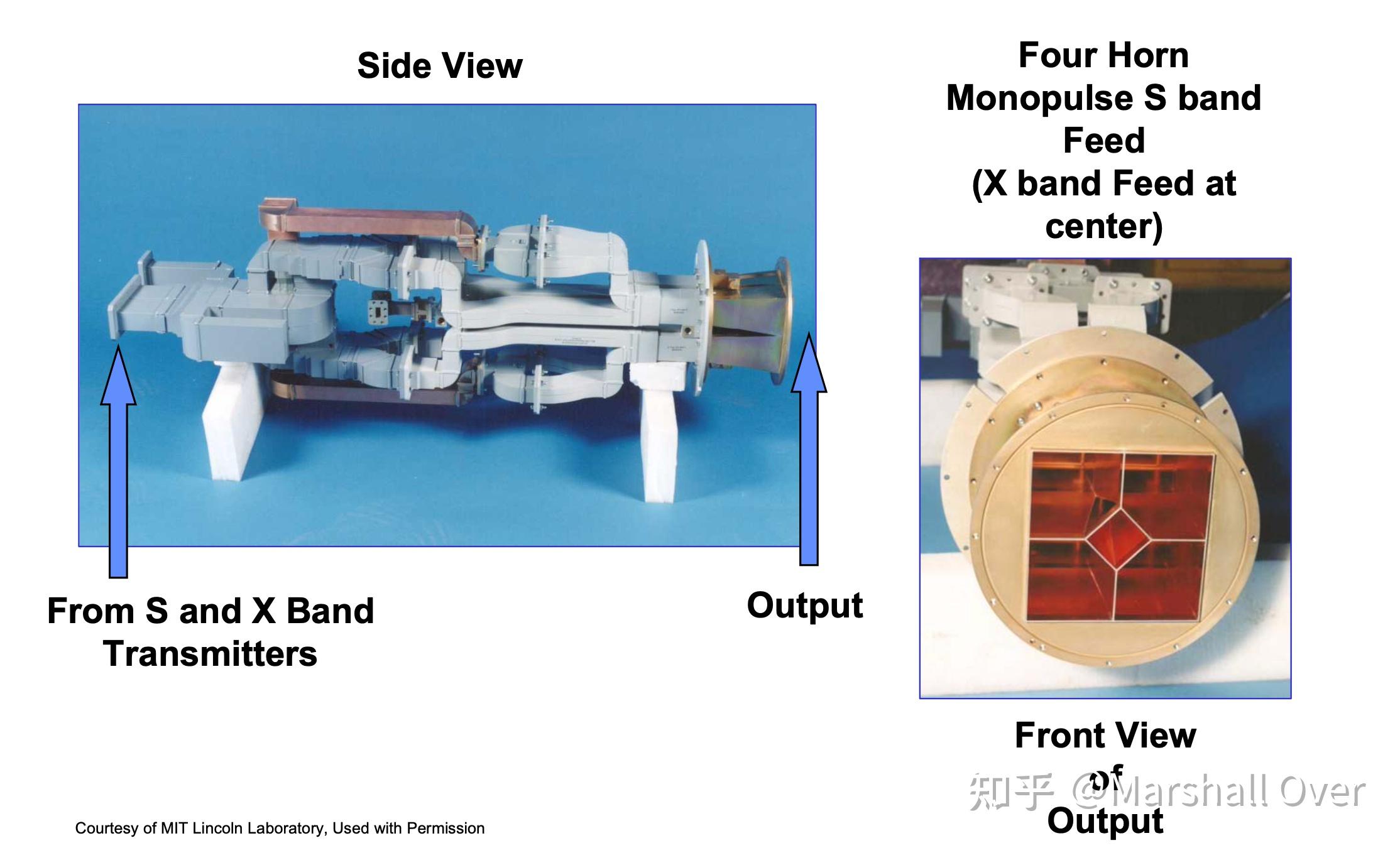
S Band Monopulse Feed with X Band Center Feed:
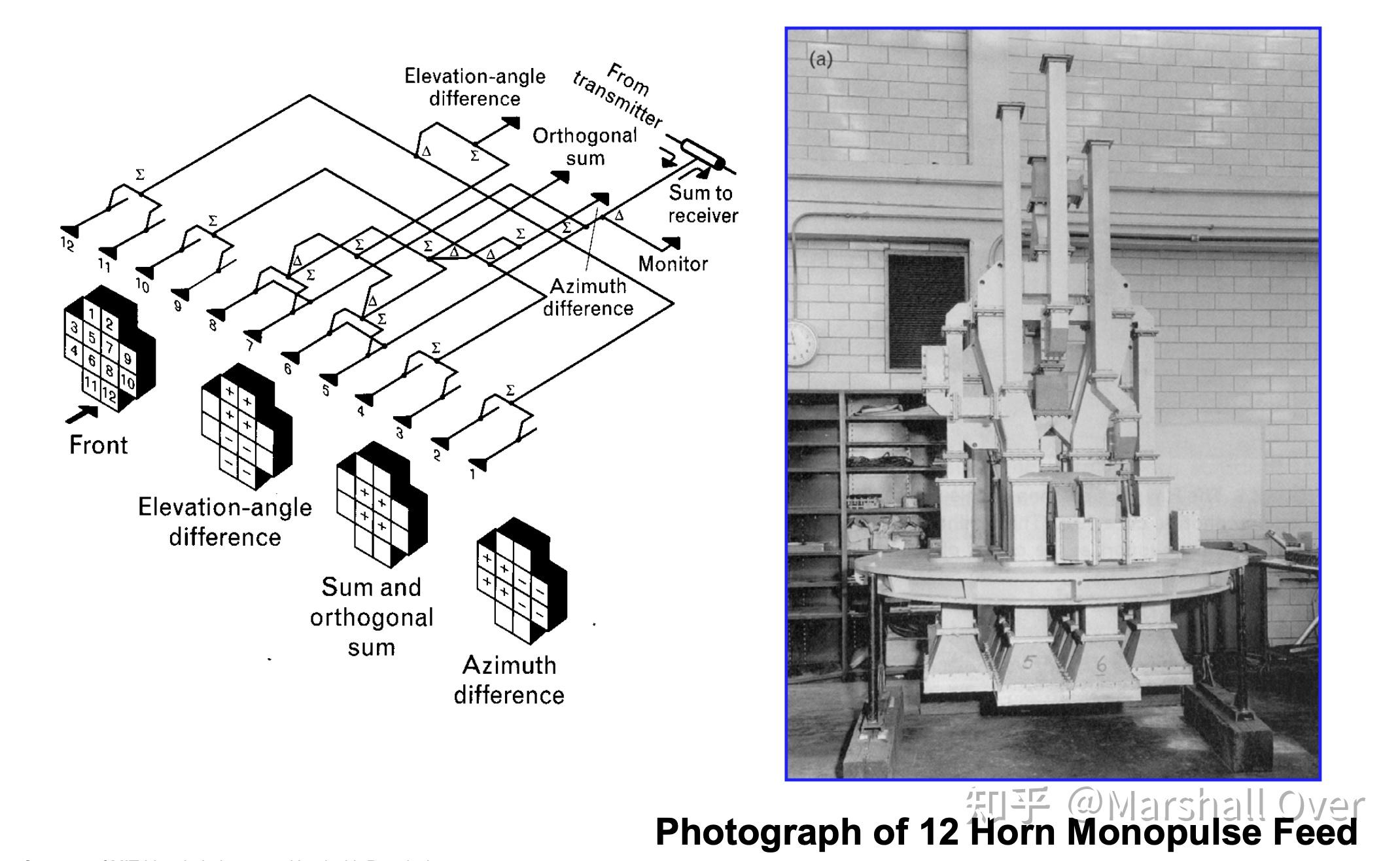
Twelve Horn Monopulse Feed:
Glint (Angle Noise):
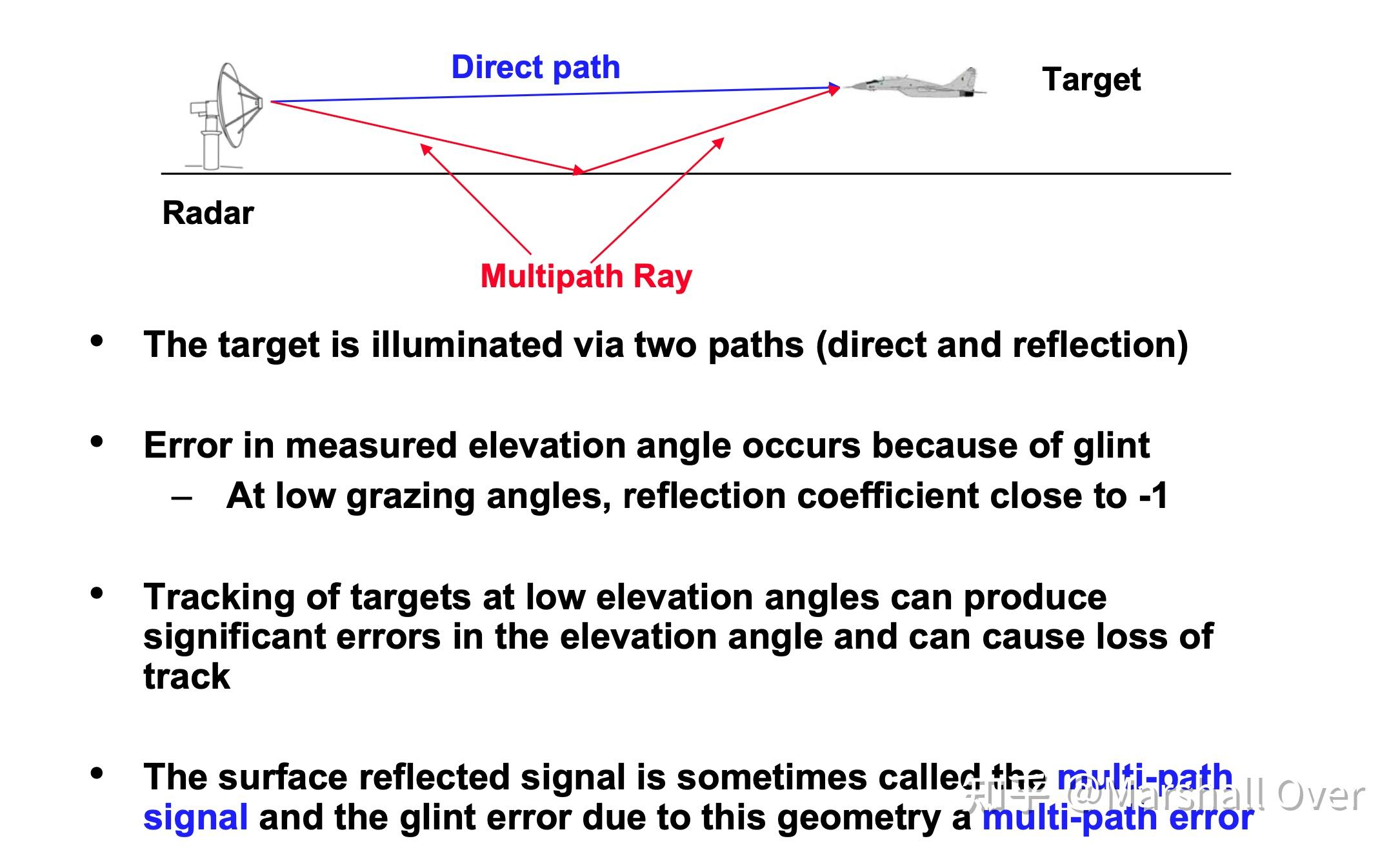
Low Angle Tracking:
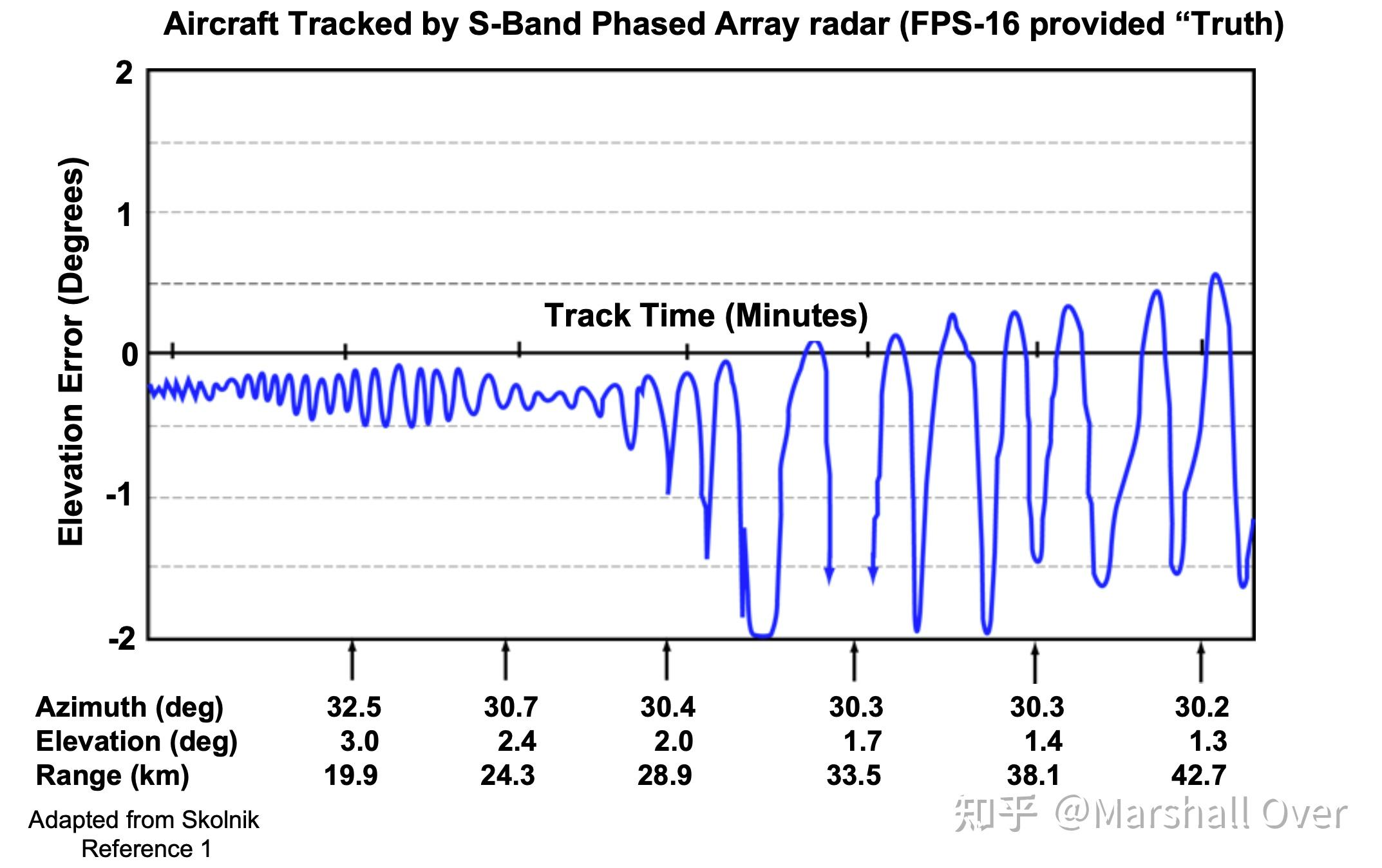
Measured Low Angle Tracking Error:
3.1.2 比相单脉冲
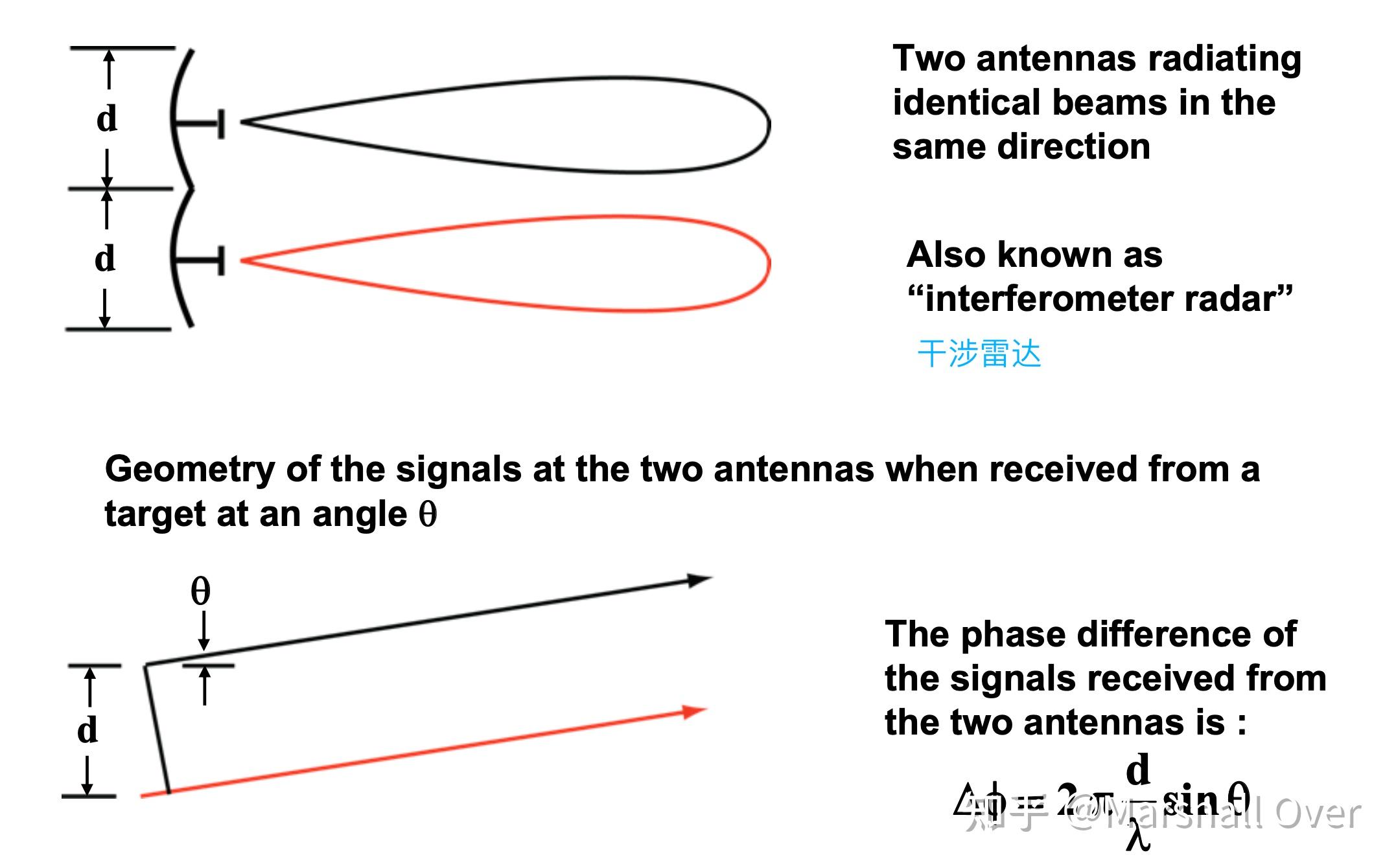
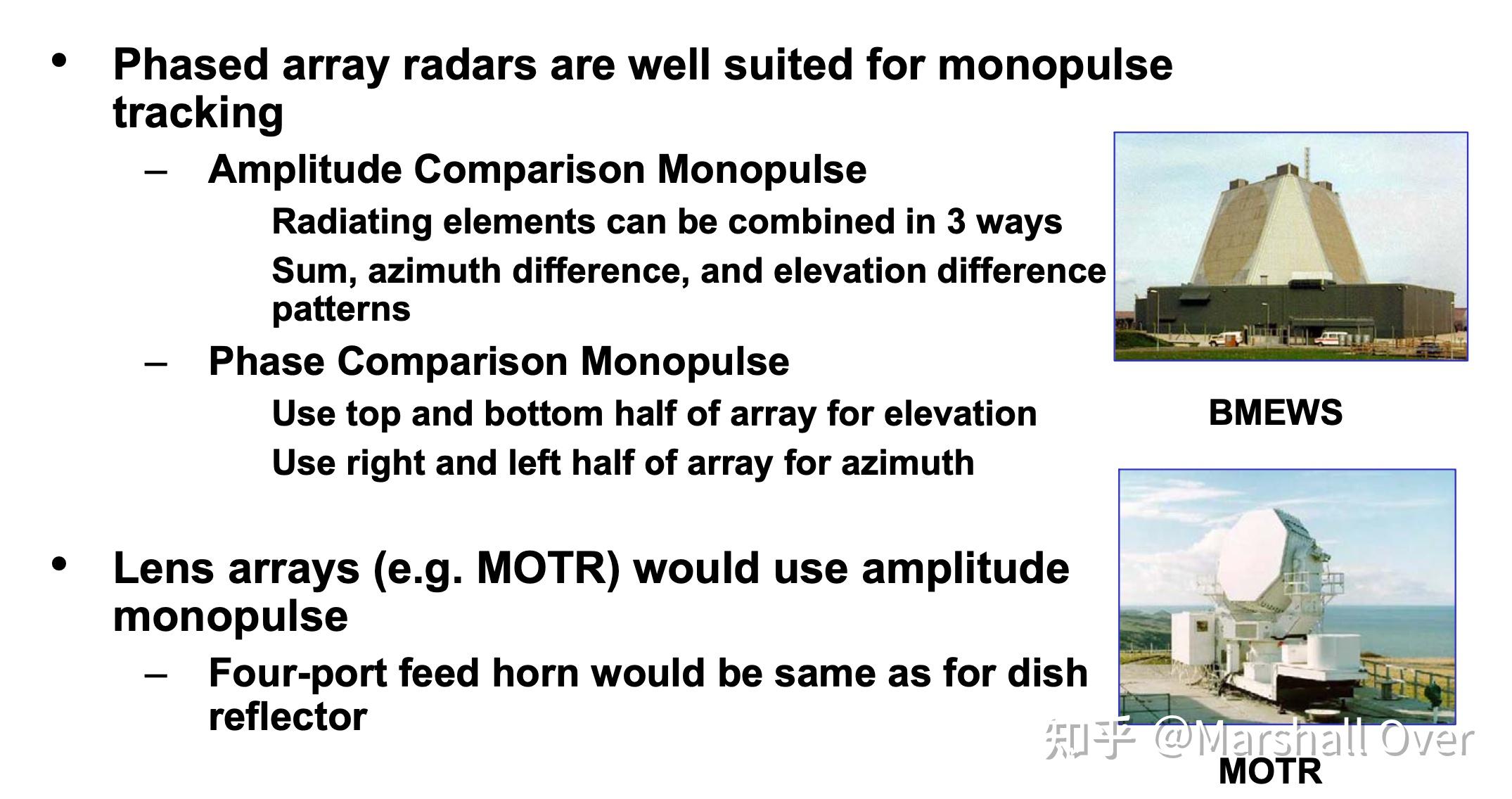
Phase Comparison Monopulse:
Comparison of Monopulse Antenna Beams:
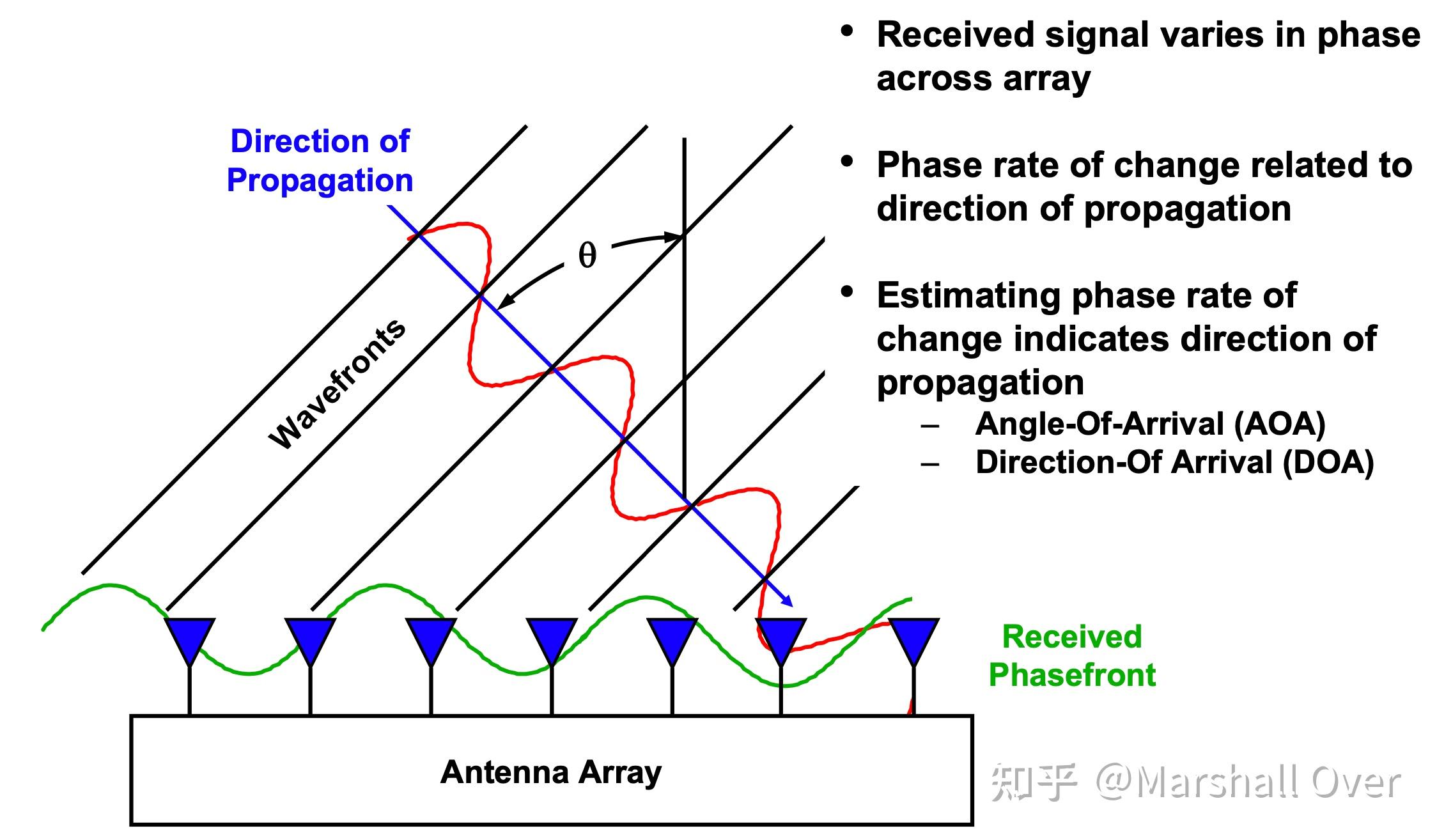
Angle Estimation with Antenna Arrays:
3.1.3 Sequential lobing
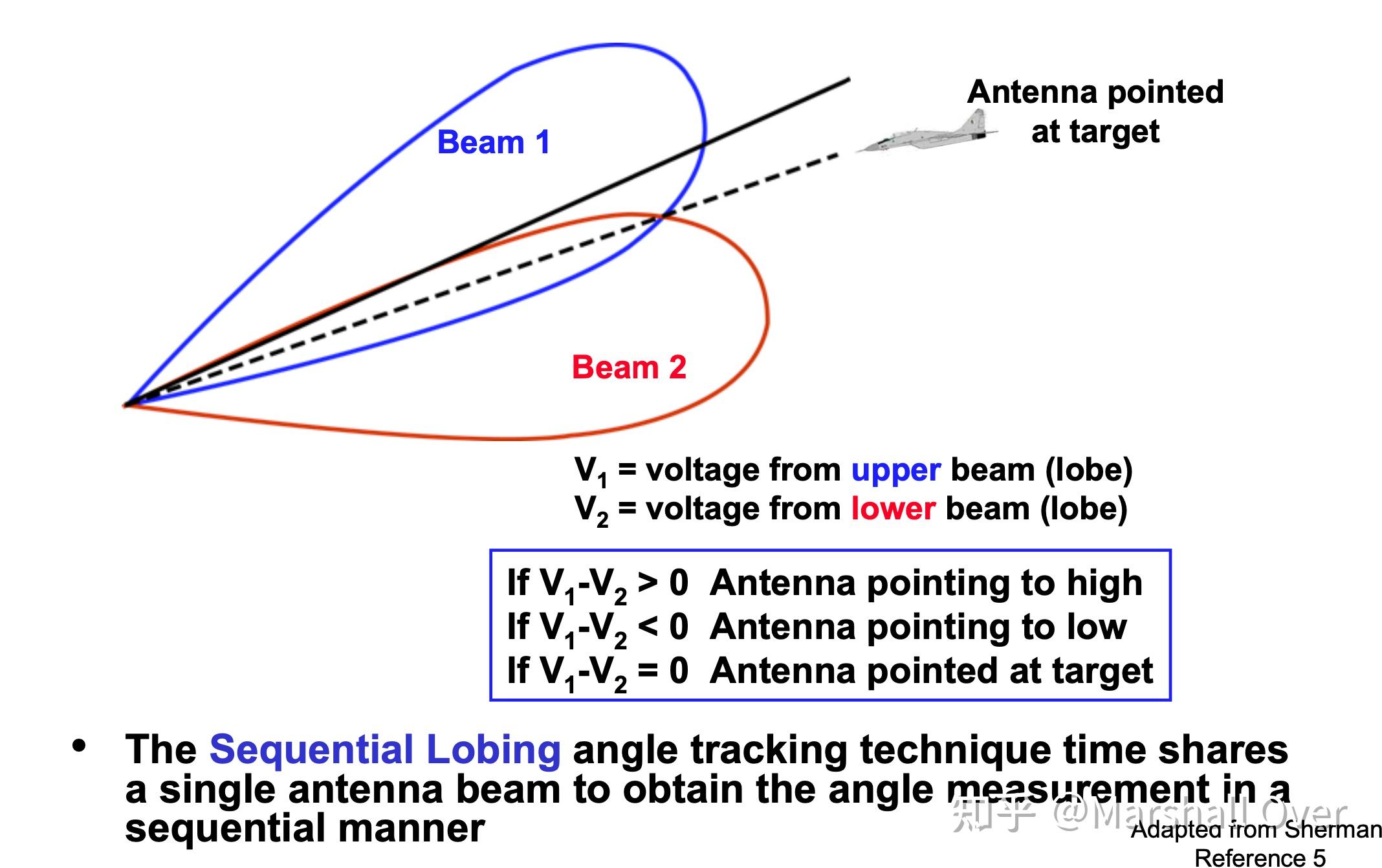
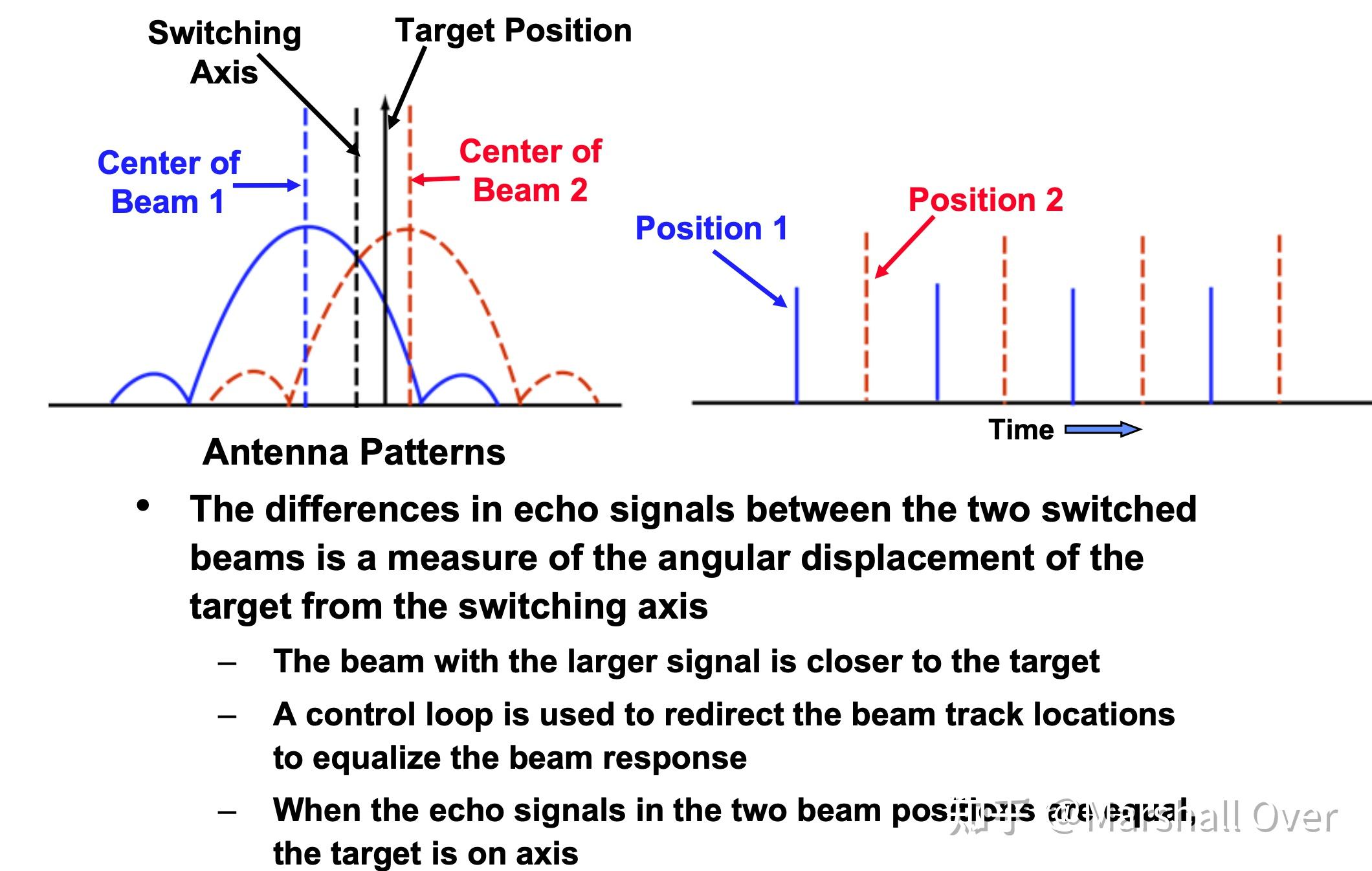
Sequential Lobing Angle Measurement:
Sequential Lobing Angle Measurement:
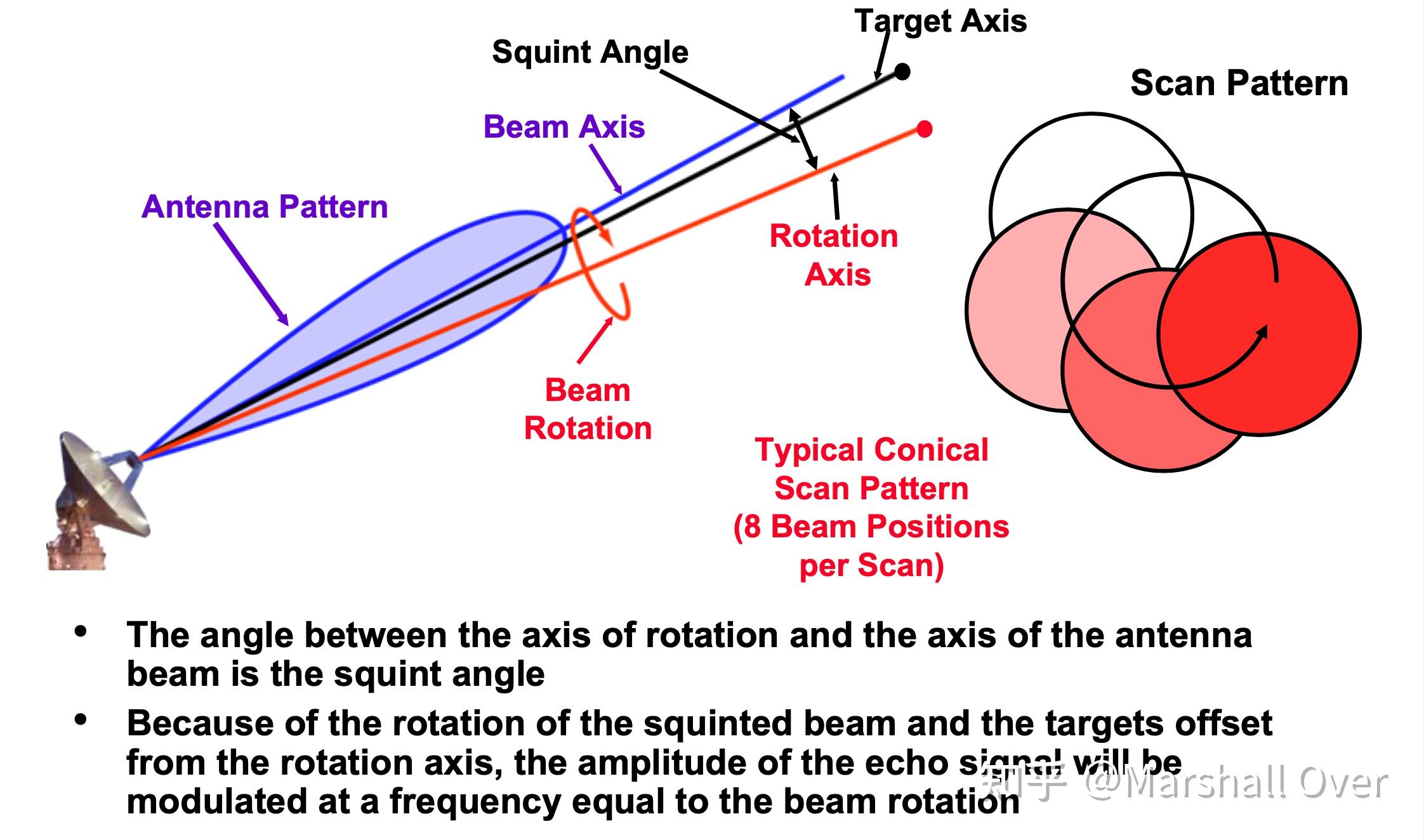
3.1.4 Conical scanning
Conical Scan Tracking Concept:
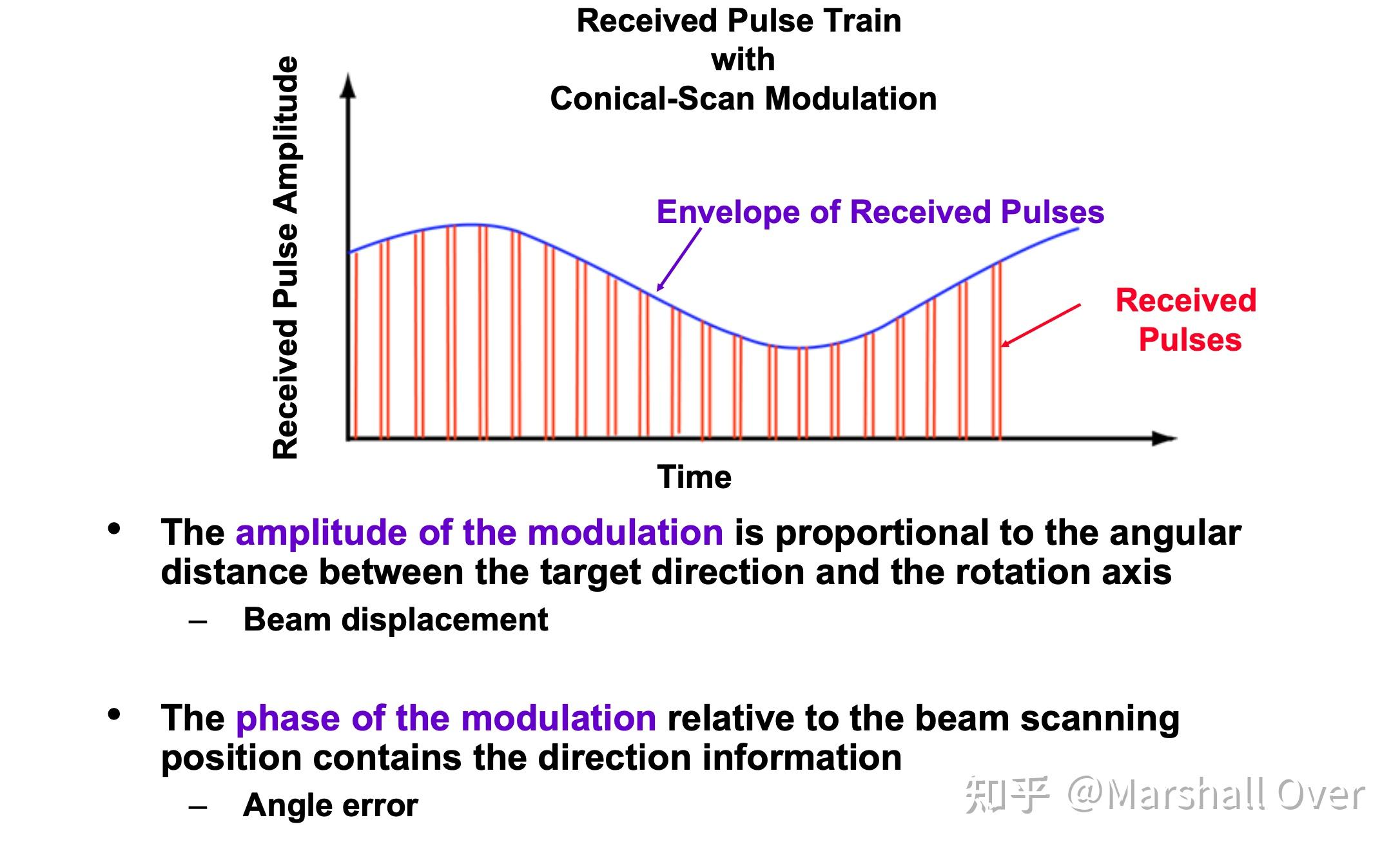
Conical Scan Pulse Trains:
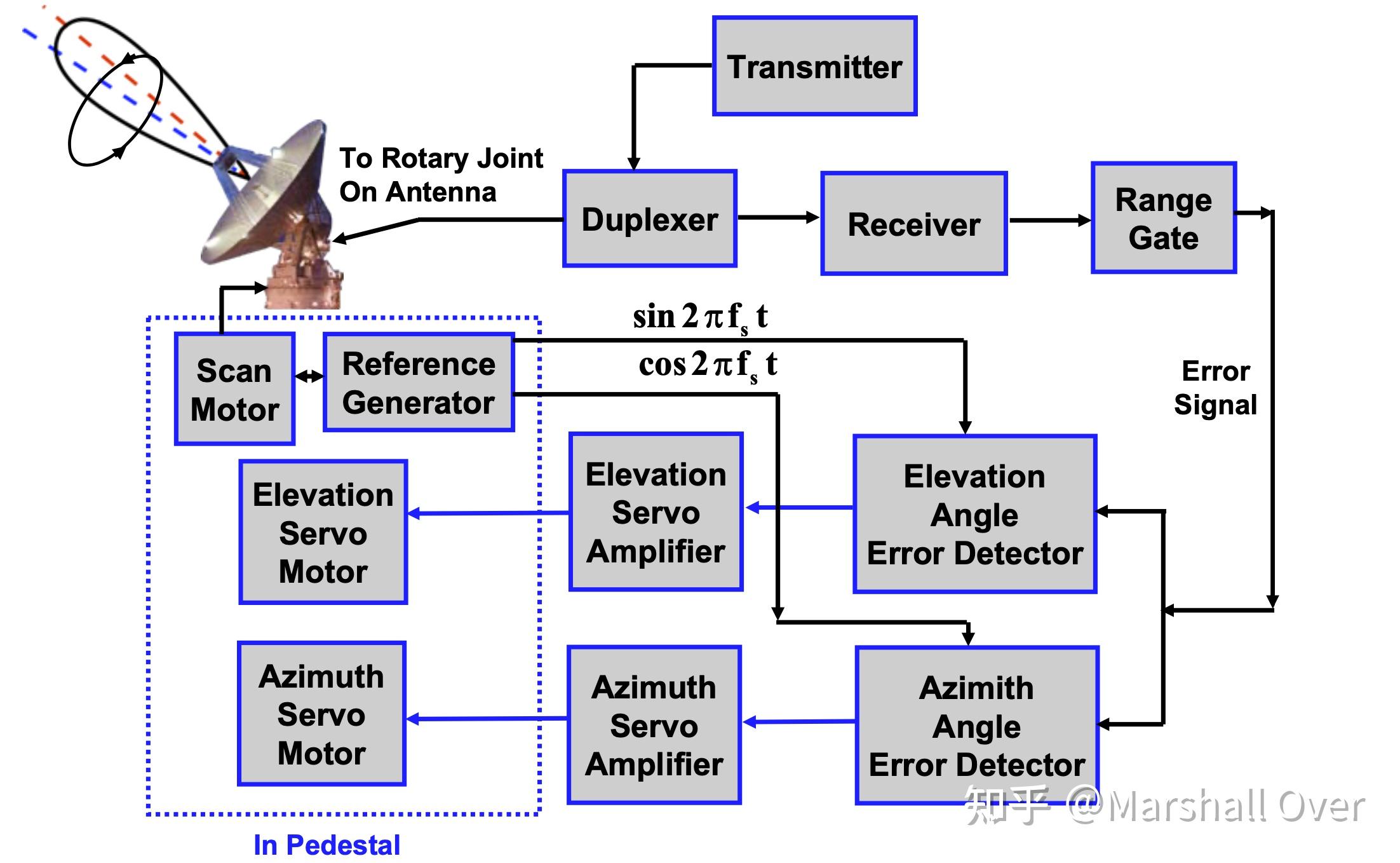
Block Diagram of Conical Scan Radar:
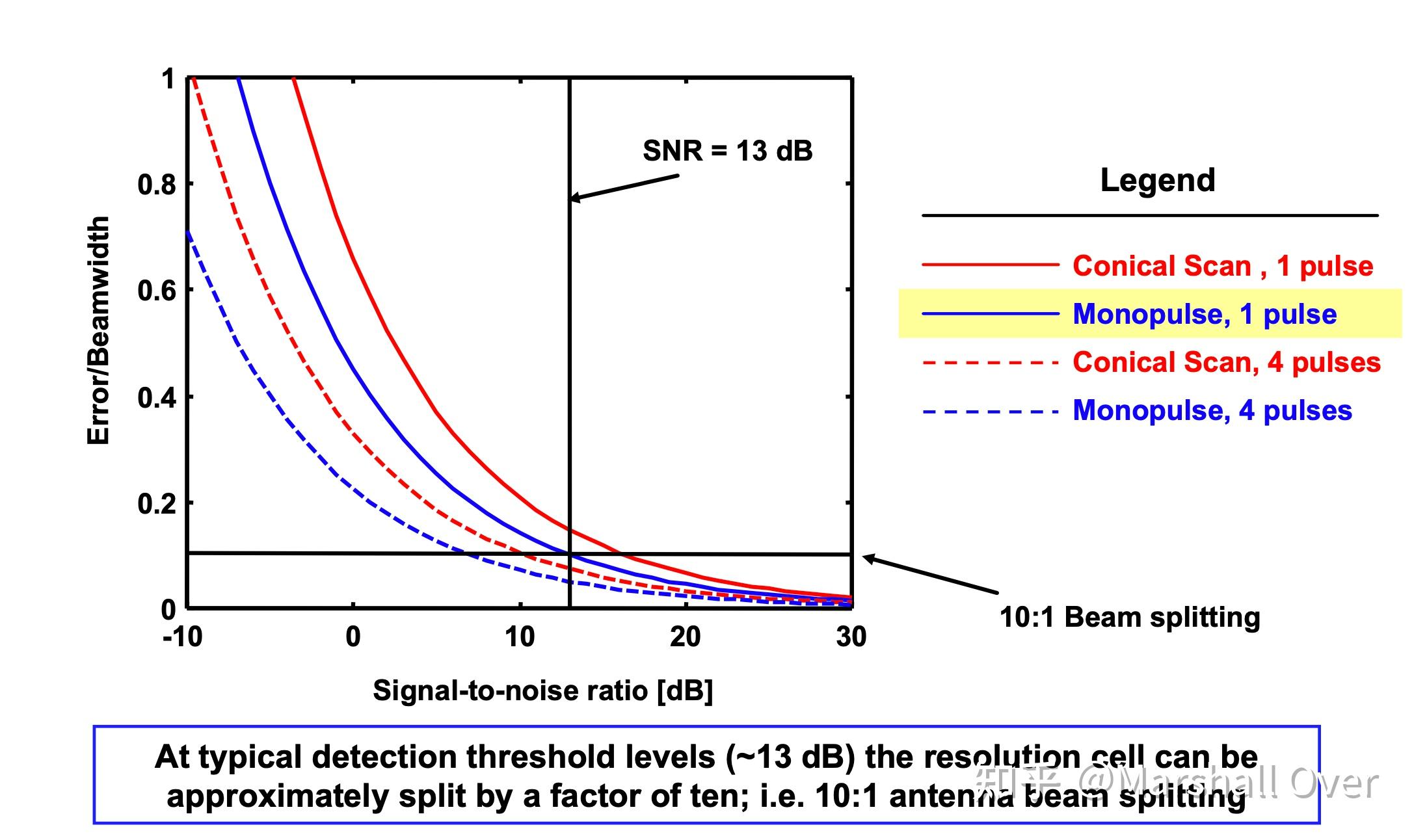
Beam-Splitting:
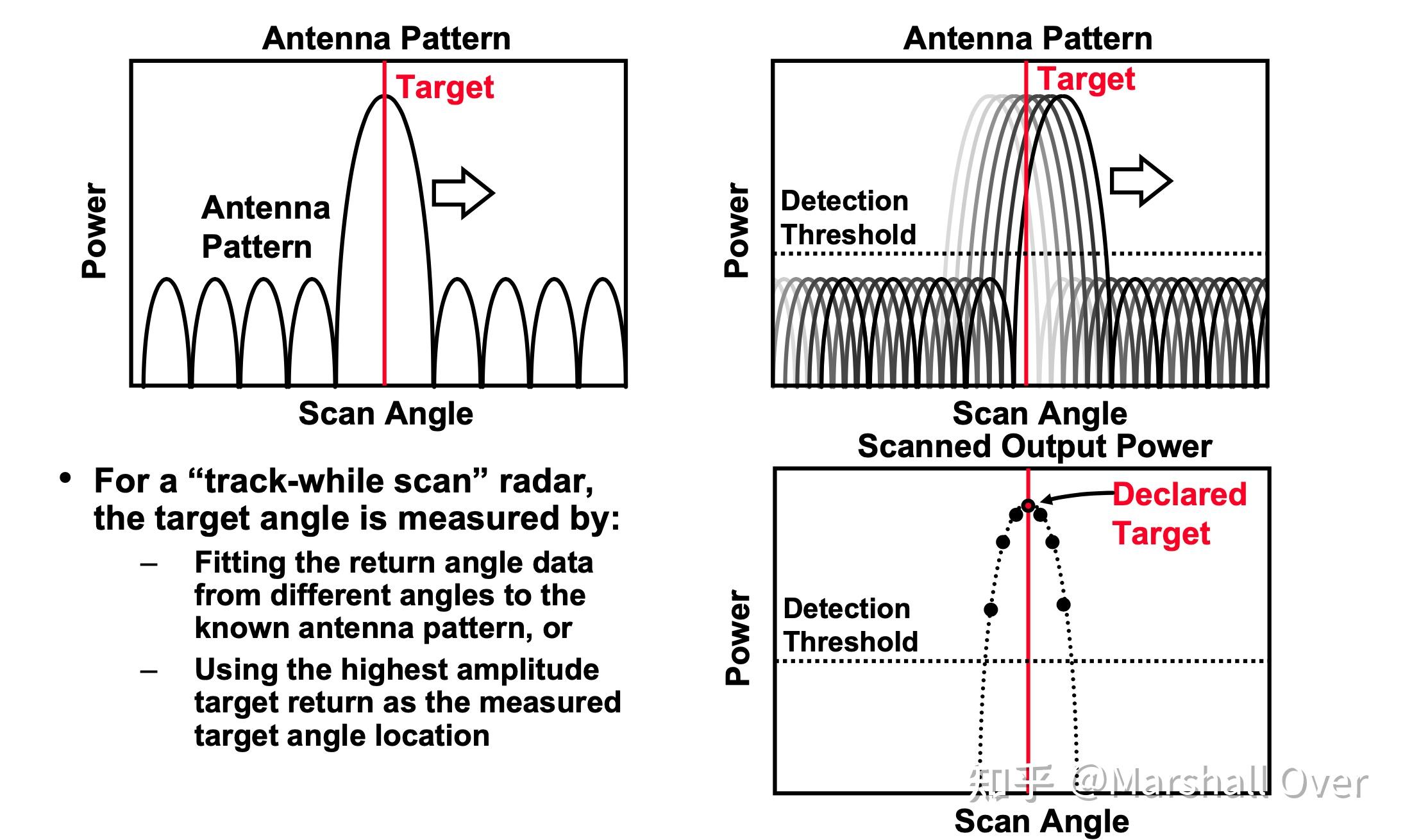
Angle Estimation with Scanning Radar: Multiple Pulse Angle Estimation。
Angle Estimation with Scanning Radar: Multiple Pulse Angle Estimation。
Angle Estimation with Array Antennas:
3.2 距离跟踪
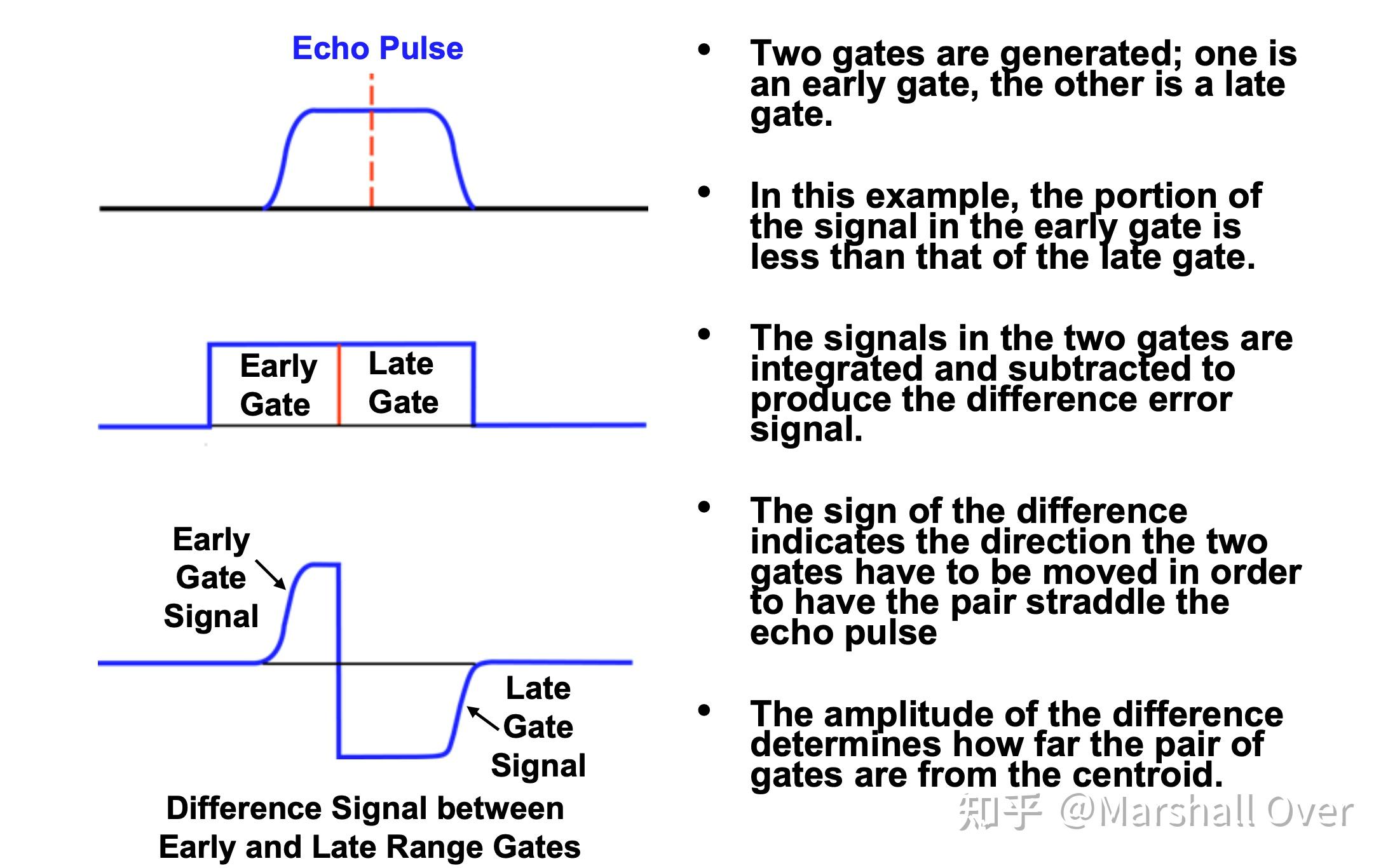
Split Gate Range Tracking:
Multi Target Tracking in Range, Angle, and Doppler:
3.3 Servo systems
Antenna Servo Systems:
Servo Bandwidth:
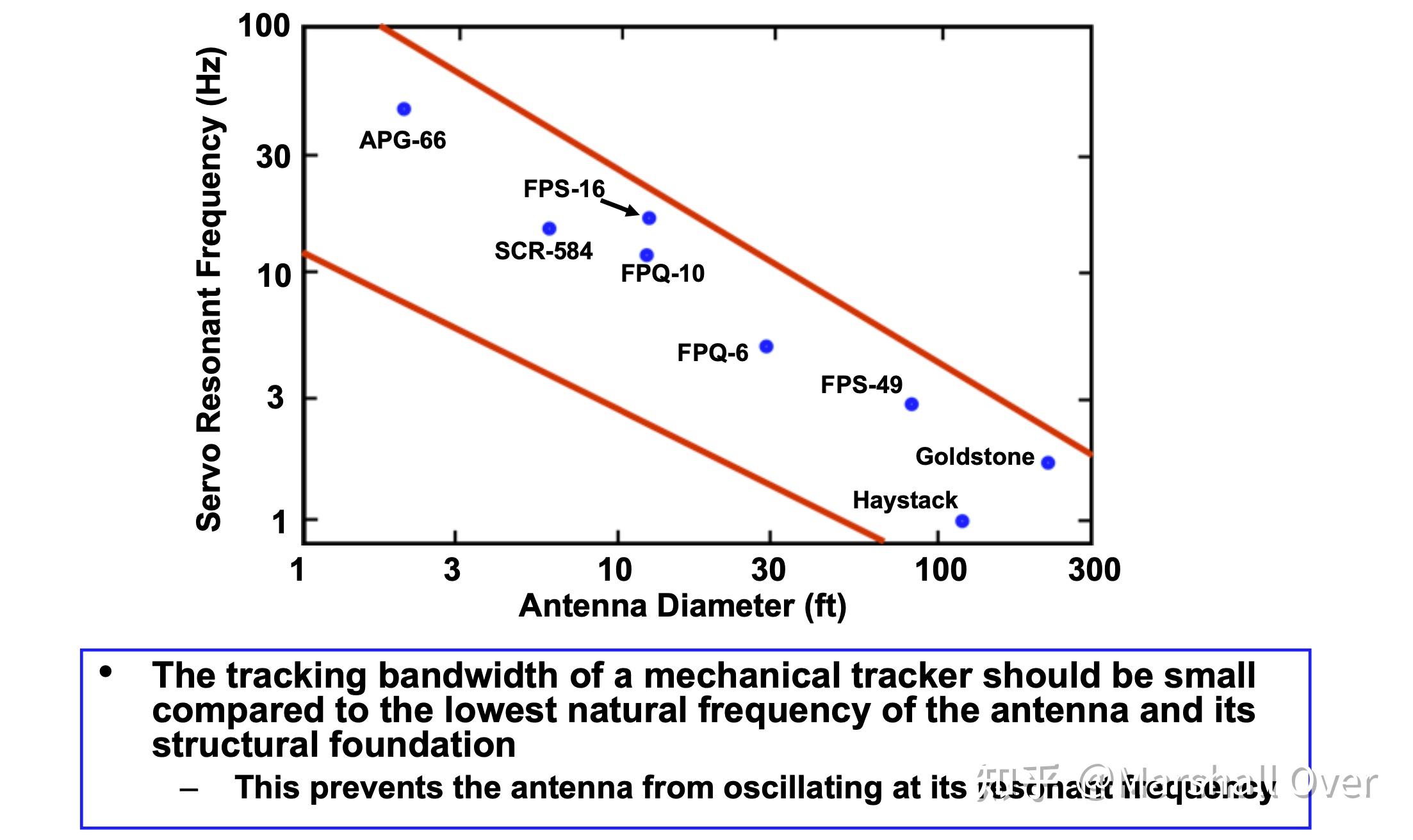
Bounds on Servo Resonant Frequency:
3 总结讨论
4 参考文献
[1] 百度翻译
[2] MIT 公开课: Radar Systems Engineering

 浙公网安备 33010602011771号
浙公网安备 33010602011771号