0 写在前面 凡事需多听但少言,聆听他人之意见,但保留自己之判断。—— 莎士比亚
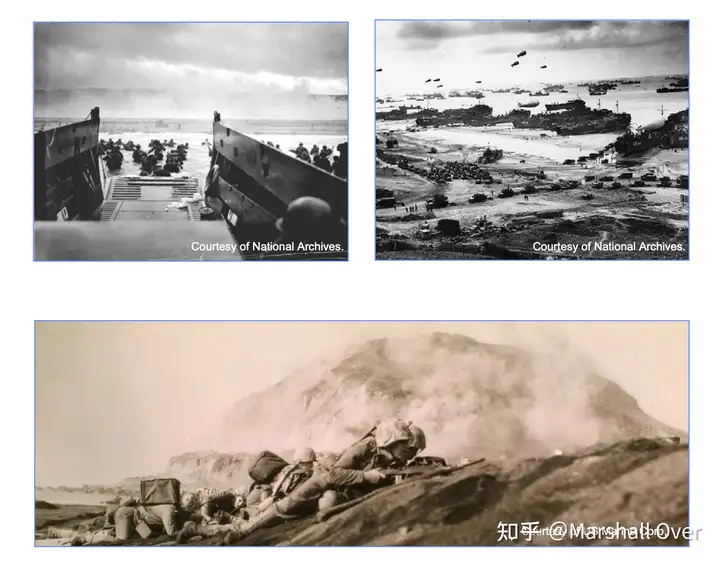
1 背景 战争的不确定性:1944:Omaha Beach 和1945:Iwo Jima 。
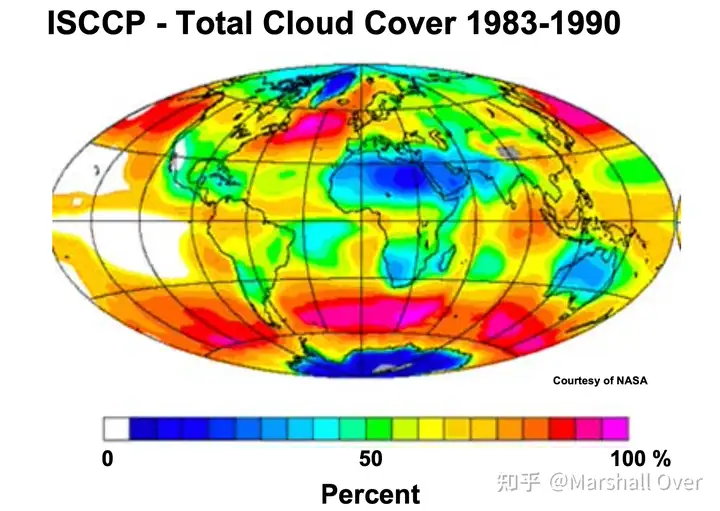
<img src="https://pic4.zhimg.com/v2-1e67362884ab73dd7fc83e5cf90bd2f7_b.jpg" data-caption="" data-size="normal" data-rawwidth="1602" data-rawheight="1250" class="origin_image zh-lightbox-thumb" width="1602" data-original="https://pic4.zhimg.com/v2-1e67362884ab73dd7fc83e5cf90bd2f7_r.jpg"/> 雷达出现之前的飞机探测 :光学系统。范围限制:大气衰减;视野狭窄:由非常小的波长引起;云层覆盖限制了作战有用性:全球范围内40-80%的时间。
<img src="https://pic3.zhimg.com/v2-4b26549982ce6025f10253c25e337eae_b.jpg" data-caption="" data-size="normal" data-rawwidth="1992" data-rawheight="544" class="origin_image zh-lightbox-thumb" width="1992" data-original="https://pic3.zhimg.com/v2-4b26549982ce6025f10253c25e337eae_r.jpg"/> 云层覆盖率: 不透明的红外和光学辐射。
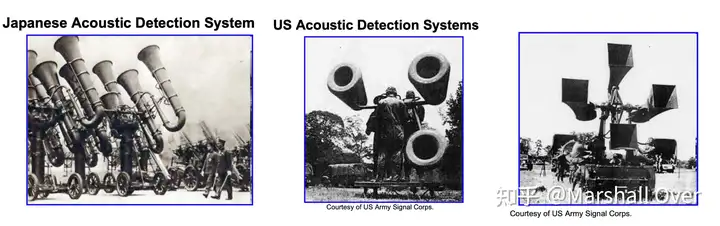
<img src="https://pic2.zhimg.com/v2-990ef4f3d9ef8db76f10d58f1ddebefd_b.jpg" data-caption="" data-size="normal" data-rawwidth="1666" data-rawheight="1182" class="origin_image zh-lightbox-thumb" width="1666" data-original="https://pic2.zhimg.com/v2-990ef4f3d9ef8db76f10d58f1ddebefd_r.jpg"/> 雷达出现之前的飞机探测 :声学系统。20世纪上半叶开发和使用。属性:范围有限;大约10多英里–视野有限;环境背景噪声有限(天气等)。夜间与探照灯一起使用。
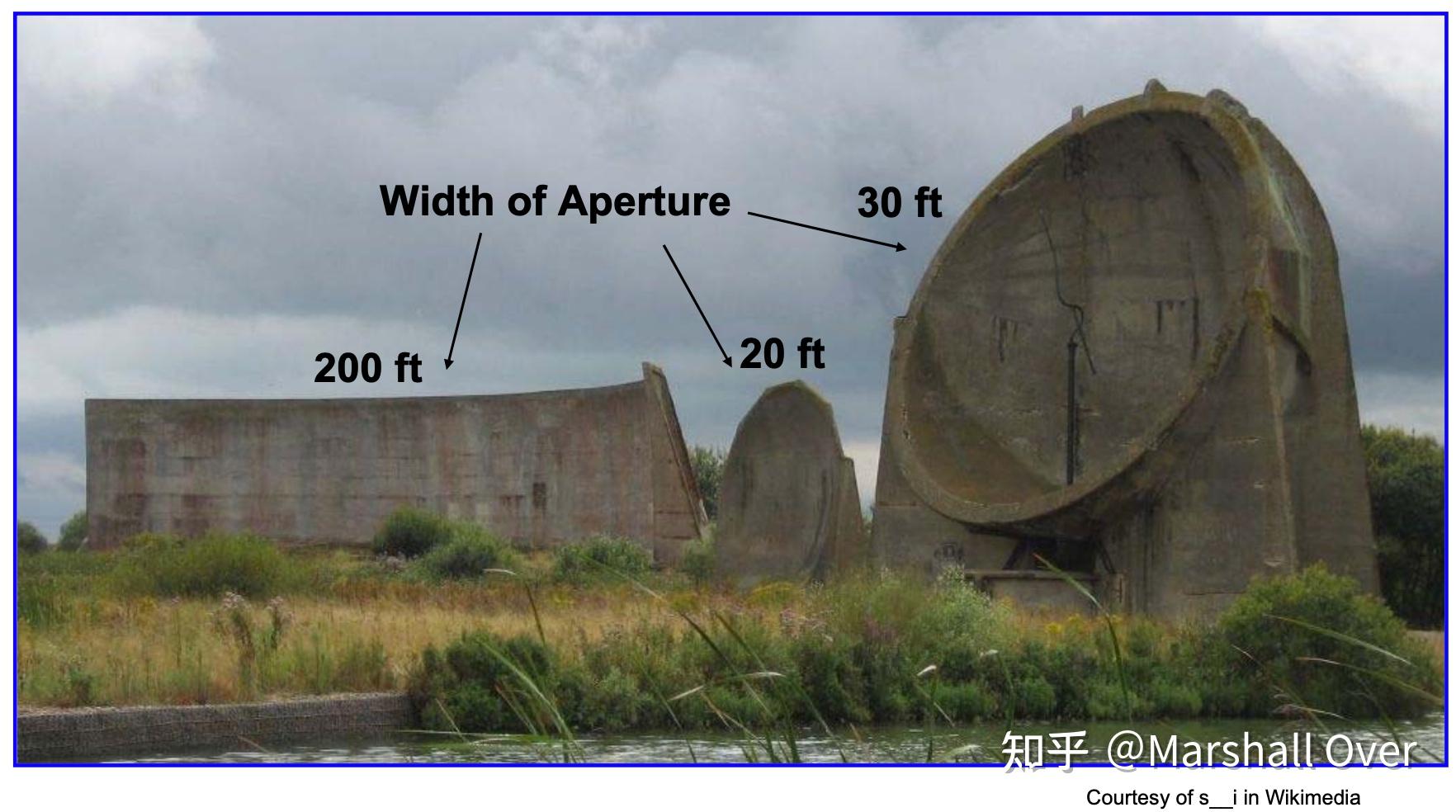
<img src="https://pic3.zhimg.com/v2-f7933258128405e7268add064b136aba_b.jpg" data-caption="" data-size="normal" data-rawwidth="1894" data-rawheight="594" class="origin_image zh-lightbox-thumb" width="1894" data-original="https://pic3.zhimg.com/v2-f7933258128405e7268add064b136aba_r.jpg"/> Sound Mirrors Dunge, Kent, UK :用于飞机探测(第二次世界大战前);探测范围短(小于15英里):在战术上有助于探测一战中缓慢的齐柏林飞艇;不适用于探测二战中速度更快的德国轰炸机。
<img src="https://pic3.zhimg.com/v2-9677220225799ba4465e4ebdab5a83ae_b.jpg" data-caption="" data-size="normal" data-rawwidth="1764" data-rawheight="984" class="origin_image zh-lightbox-thumb" width="1764" data-original="https://pic3.zhimg.com/v2-9677220225799ba4465e4ebdab5a83ae_r.jpg"/> 雷达工作过程: 雷达发射电磁波,当它击中远处的目标时,部分能量会被散射,雷达天线收集了一小部分散射能量,即雷达回波。当发射电磁能脉冲时以及当接收到目标回波时差,是衡量目标距离的指标。相信我,事情会变得复杂得多!
<img src="https://pic1.zhimg.com/v2-390b27dee9cd0e25cfe6add50d43cf44_b.jpg" data-caption="" data-size="normal" data-rawwidth="1704" data-rawheight="480" class="origin_image zh-lightbox-thumb" width="1704" data-original="https://pic1.zhimg.com/v2-390b27dee9cd0e25cfe6add50d43cf44_r.jpg"/> 雷达的早期: SirRobert Alexander Watson-Watt ,1892年4月13日-1973年12月5日),英国 苏格兰 物理学家,雷达 的发明者。他是蒸汽机发明者詹姆斯·瓦特 的后代。包括美国在内的许多其他国家都开展了重要的早期工作(20世纪20年代和30年代)。在对原理进行实验验证后,Watson Watt于1935年获得专利。Chain Home雷达系统开发的领导者。Chain Home 是地面控制拦截和机载拦截雷达。
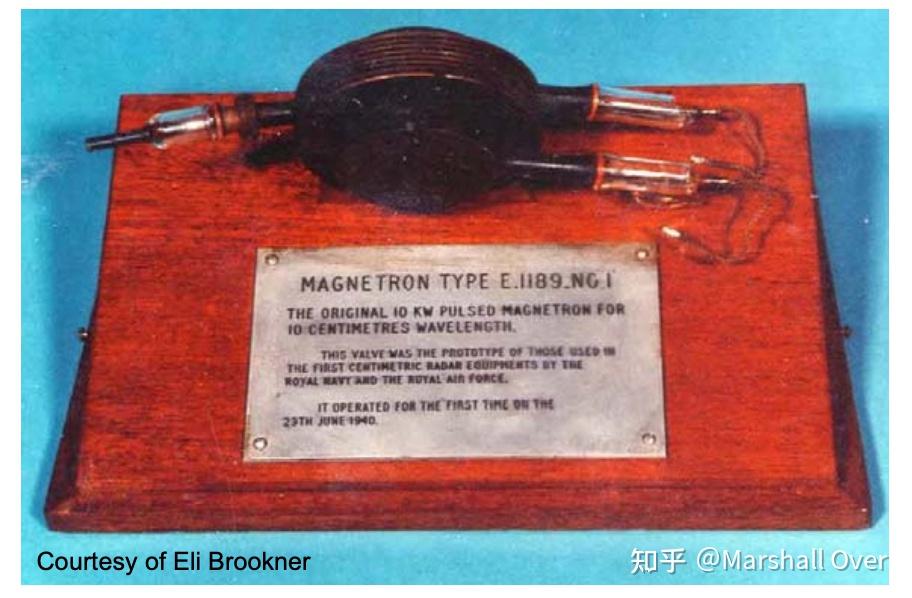
<img src="https://pic4.zhimg.com/v2-cb8380efe6ec0819b76534d16f84c21f_b.jpg" data-size="normal" data-rawwidth="500" data-rawheight="666" class="origin_image zh-lightbox-thumb" width="500" data-original="https://pic4.zhimg.com/v2-cb8380efe6ec0819b76534d16f84c21f_r.jpg"/> Portrait photograph of Robert Watson-Watt “Tizard使命”(英国驻美国技术与科学使命) :1940年秋天,七名英国雷达专家和一个“黑匣子”被派往美国。包含空腔磁控管和“英国知道几乎所有关于雷达的东西”。拥有腔磁控管技术对盟军战争雷达的发展至关重要。英国原装10cm 10kW脉冲磁控管如下图所示。
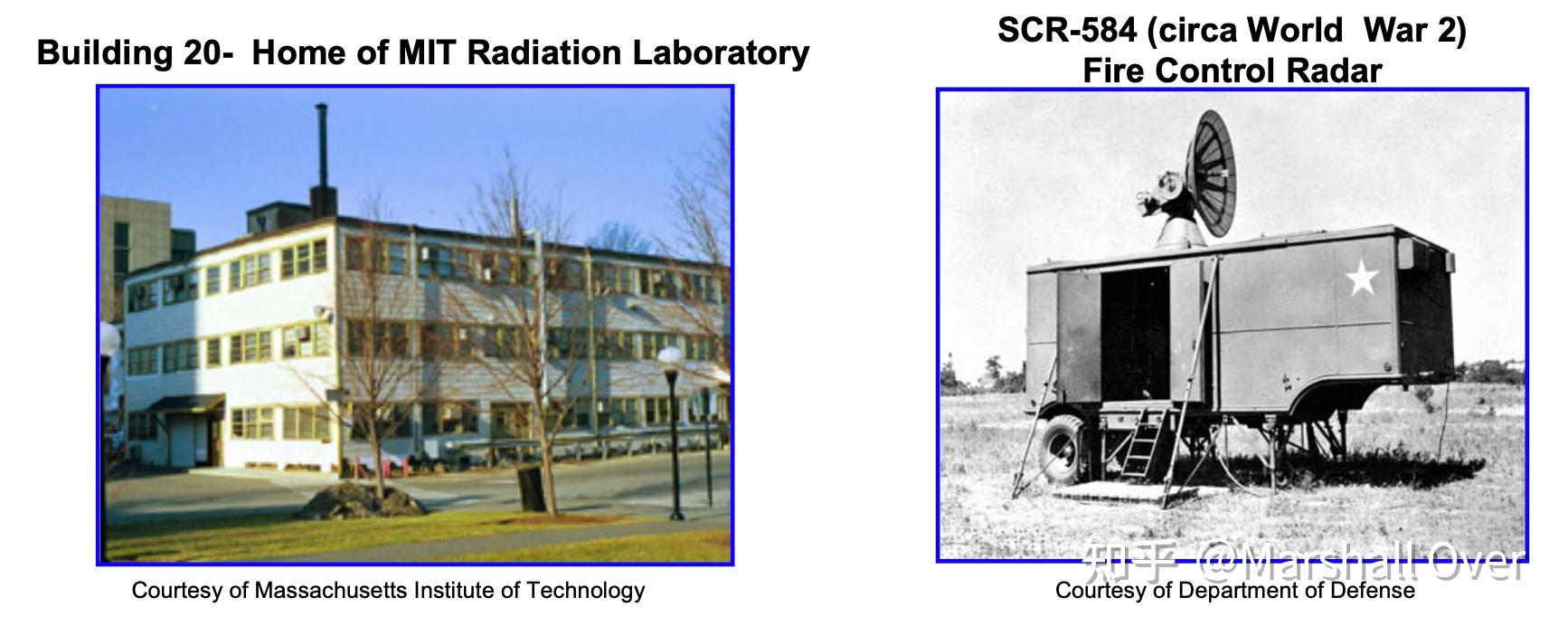
<img src="https://pic1.zhimg.com/v2-5ad0b47dcadf198c0c7b2902e451b5bc_b.jpg" data-caption="" data-size="normal" data-rawwidth="912" data-rawheight="598" class="origin_image zh-lightbox-thumb" width="912" data-original="https://pic1.zhimg.com/v2-5ad0b47dcadf198c0c7b2902e451b5bc_r.jpg"/> 麻省理工学院辐射实验室(1940年至1945年间运营) :开发并部署了用于战争的先进雷达系统;利用英国10厘米腔磁控管发明;增加到近4000人(9人获得诺贝尔奖);设计了几乎一半在第二次世界大战中部署的雷达;创建了100多个不同的雷达系统(价值15亿美元的雷达)。
<img src="https://pic2.zhimg.com/v2-5a4d599f05525cfd4f6144ab77641e95_b.jpg" data-caption="" data-size="normal" data-rawwidth="1734" data-rawheight="692" class="origin_image zh-lightbox-thumb" width="1734" data-original="https://pic2.zhimg.com/v2-5a4d599f05525cfd4f6144ab77641e95_r.jpg"/> Chain Home Radar System Deployment Began 1936 :这部分可参考雷达系统导论内容。
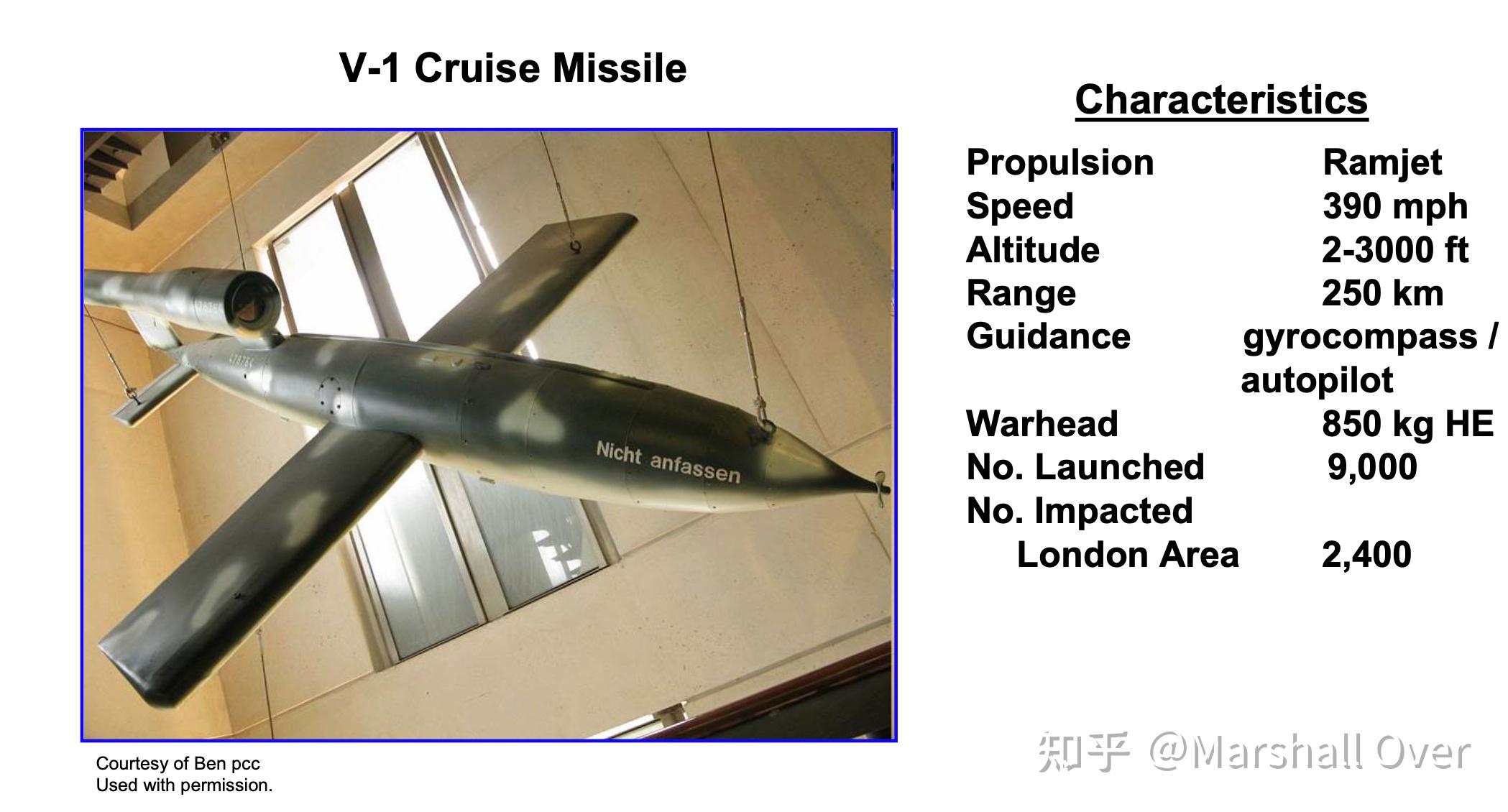
V-1 “Buzz Bomb” – The Threat :
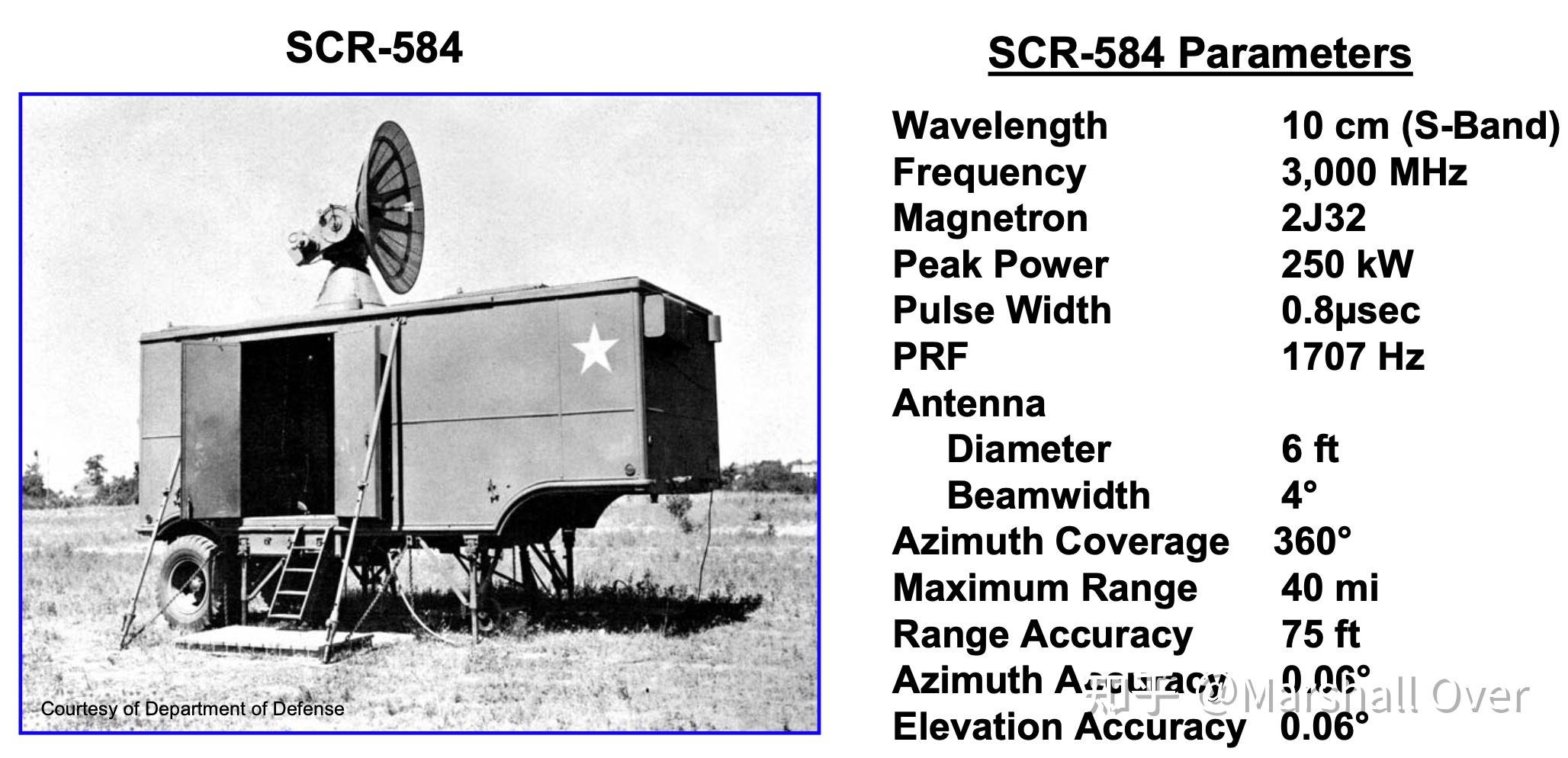
<img src="https://pic1.zhimg.com/v2-644501b193b181690fd63c86c18696cc_b.jpg" data-caption="" data-size="normal" data-rawwidth="2098" data-rawheight="1130" class="origin_image zh-lightbox-thumb" width="2098" data-original="https://pic1.zhimg.com/v2-644501b193b181690fd63c86c18696cc_r.jpg"/> The SCR 584 Fire-Control Radar :
<img src="https://pic2.zhimg.com/v2-9e87df11e70798db3117942ebeeb52dd_b.jpg" data-caption="" data-size="normal" data-rawwidth="2056" data-rawheight="994" class="origin_image zh-lightbox-thumb" width="2056" data-original="https://pic2.zhimg.com/v2-9e87df11e70798db3117942ebeeb52dd_r.jpg"/> <img src="https://pic1.zhimg.com/v2-1672d1a291bfc1e19d721a77bd366408_b.jpg" data-caption="" data-size="normal" data-rawwidth="2114" data-rawheight="1032" class="origin_image zh-lightbox-thumb" width="2114" data-original="https://pic1.zhimg.com/v2-1672d1a291bfc1e19d721a77bd366408_r.jpg"/> 雷达近程引信: 雷达近程引信革命性AAA与炮兵作战。
<img src="https://pic2.zhimg.com/v2-82660ab77ecaa9d563d4687183ae7e95_b.jpg" data-caption="" data-size="normal" data-rawwidth="2226" data-rawheight="1188" class="origin_image zh-lightbox-thumb" width="2226" data-original="https://pic2.zhimg.com/v2-82660ab77ecaa9d563d4687183ae7e95_r.jpg"/> 第二次世界大战防空系统 :
<img src="https://pic2.zhimg.com/v2-ec20560ac03bbb0b56b843d8cf36c60d_b.jpg" data-caption="" data-size="normal" data-rawwidth="2160" data-rawheight="1332" class="origin_image zh-lightbox-thumb" width="2160" data-original="https://pic2.zhimg.com/v2-ec20560ac03bbb0b56b843d8cf36c60d_r.jpg"/> 2 雷达基础 2.1 雷达属性 雷达的主要正面属性:目标的远程探测和跟踪:1000英里;全天候全天时运行;广域搜索功能;相干操作可以:同时可靠地检测目标并抑制不需要的“杂乱”物体;目标成像(固定和移动);通过天线的电子扫描实现非常快的波束移动(微秒);能够自适应地调整天线波束以减轻自然干扰和人为干扰;在微波频率下相对无损的直线传播。
雷达的主要负面属性:远程检测需要:大型和重型天线;高功率变送器;大量用电量;$$$$$。雷达波束传播不畅:穿过地球、水或茂密的树叶;障碍物周围。易受干扰和反辐射导弹的影响。目标可以检测到它正在被照亮。目标可以在角度空间中定位雷达。来自某些目标的回波变得非常小:低可观测技术。
监视和火控雷达 :
<img src="https://pic2.zhimg.com/v2-6afd9a1059c455aafa5b3f0ef3bc111d_b.jpg" data-caption="" data-size="normal" data-rawwidth="2206" data-rawheight="1374" class="origin_image zh-lightbox-thumb" width="2206" data-original="https://pic2.zhimg.com/v2-6afd9a1059c455aafa5b3f0ef3bc111d_r.jpg"/> 机载雷达 :
<img src="https://pic1.zhimg.com/v2-099601b5c94d16eeaaeac1d5dea542ec_b.jpg" data-caption="" data-size="normal" data-rawwidth="2196" data-rawheight="1360" class="origin_image zh-lightbox-thumb" width="2196" data-original="https://pic1.zhimg.com/v2-099601b5c94d16eeaaeac1d5dea542ec_r.jpg"/> 测量雷达:
<img src="https://pic4.zhimg.com/v2-5722cfbdaad70bc76c7efd31b9e0aad3_b.jpg" data-caption="" data-size="normal" data-rawwidth="2160" data-rawheight="1340" class="origin_image zh-lightbox-thumb" width="2160" data-original="https://pic4.zhimg.com/v2-5722cfbdaad70bc76c7efd31b9e0aad3_r.jpg"/> 民用雷达 :
<img src="https://pic2.zhimg.com/v2-b39b990fdf6423ecc7d5ea41c629ef05_b.jpg" data-caption="" data-size="normal" data-rawwidth="2224" data-rawheight="1376" class="origin_image zh-lightbox-thumb" width="2224" data-original="https://pic2.zhimg.com/v2-b39b990fdf6423ecc7d5ea41c629ef05_r.jpg"/> 其他民用雷达 :
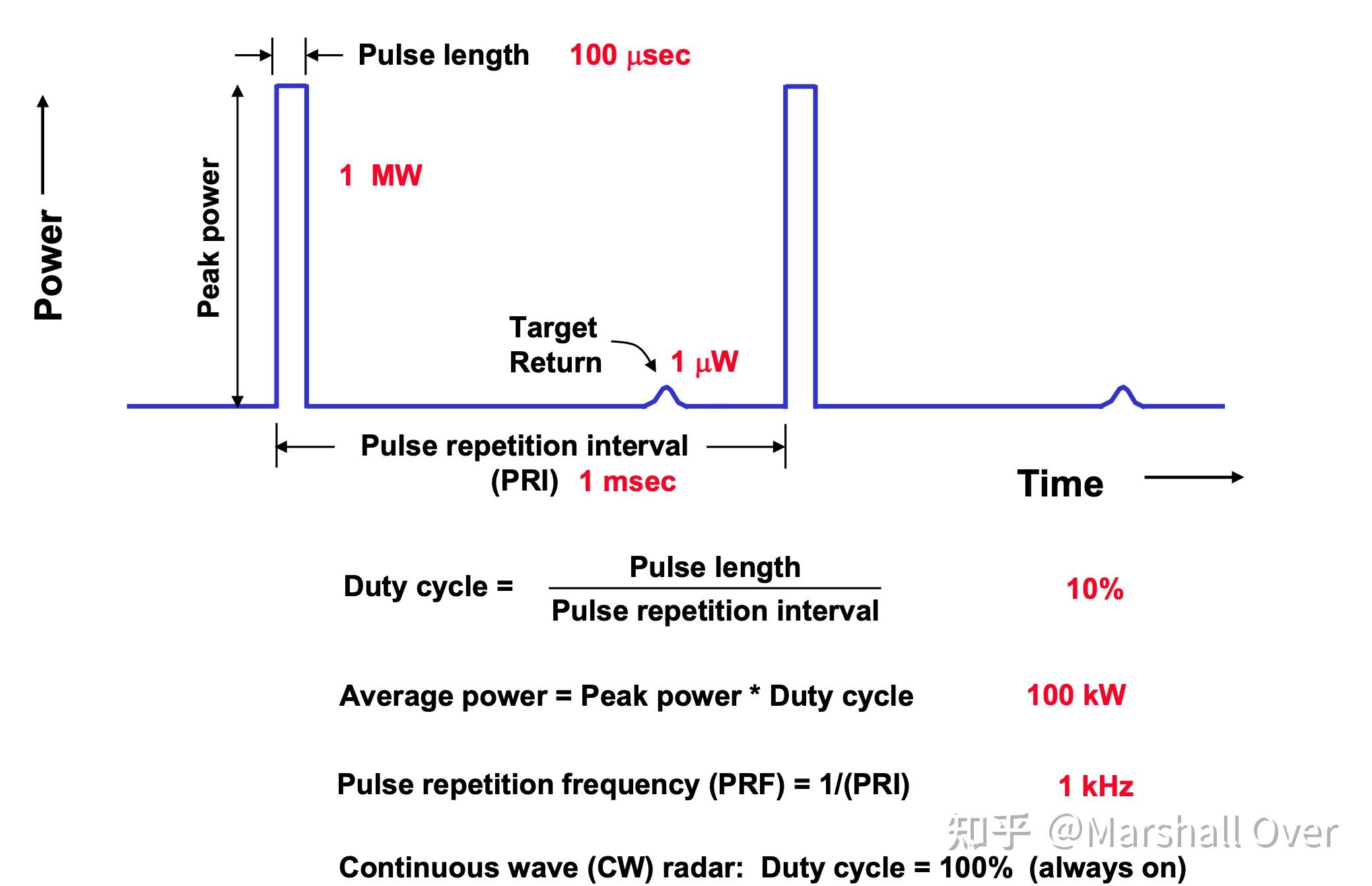
<img src="https://pic1.zhimg.com/v2-95e0647f5f2f1714a96911edec95879c_b.jpg" data-caption="" data-size="normal" data-rawwidth="2206" data-rawheight="1366" class="origin_image zh-lightbox-thumb" width="2206" data-original="https://pic1.zhimg.com/v2-95e0647f5f2f1714a96911edec95879c_r.jpg"/> 2.2 雷达测量 脉冲雷达术语和概念 :
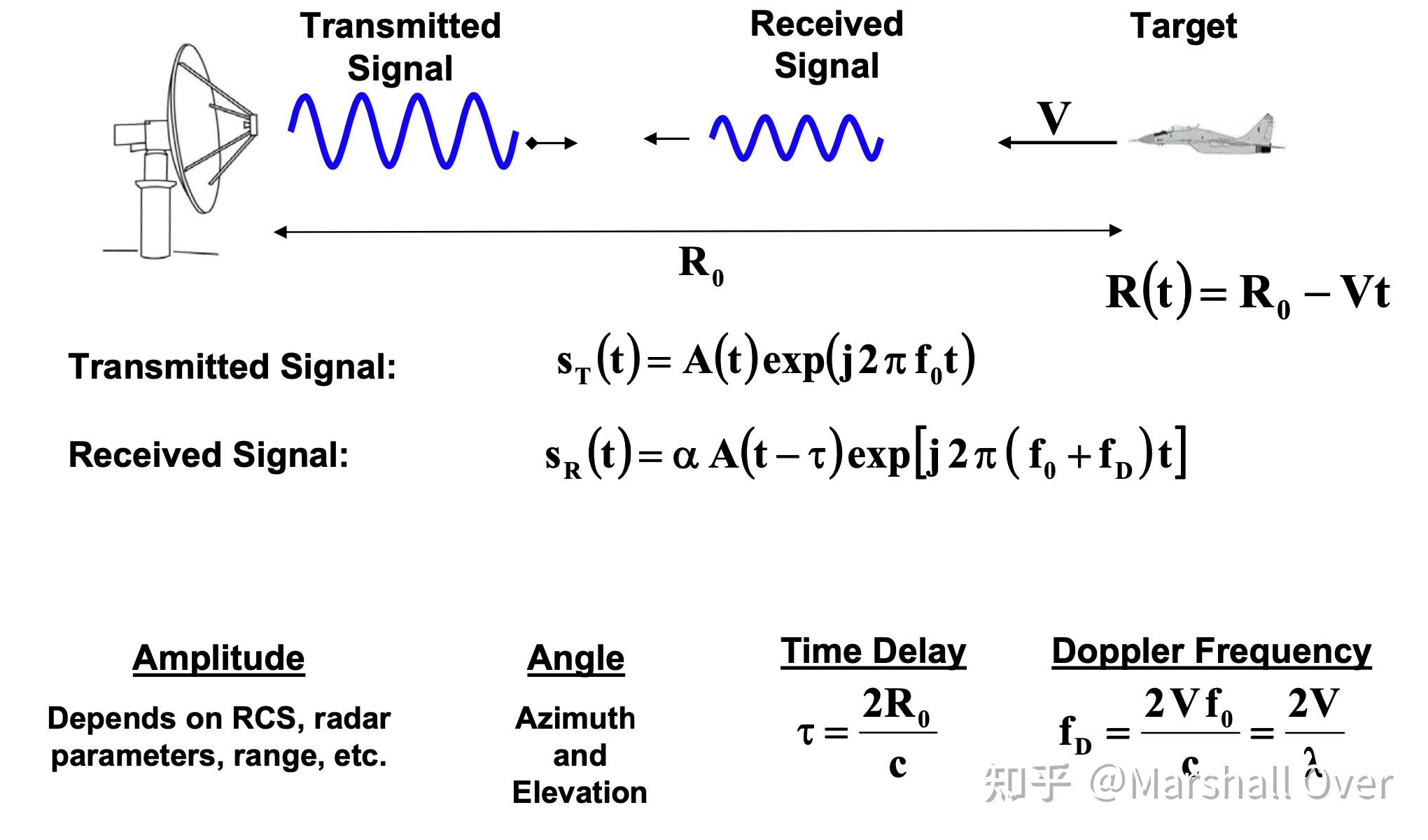
<img src="https://pic2.zhimg.com/v2-4f5b1d7688008ee0f14f892454e133ed_b.jpg" data-caption="" data-size="normal" data-rawwidth="2078" data-rawheight="1342" class="origin_image zh-lightbox-thumb" width="2078" data-original="https://pic2.zhimg.com/v2-4f5b1d7688008ee0f14f892454e133ed_r.jpg"/> 雷达观测变量 :幅度、角度、时延、多普勒。
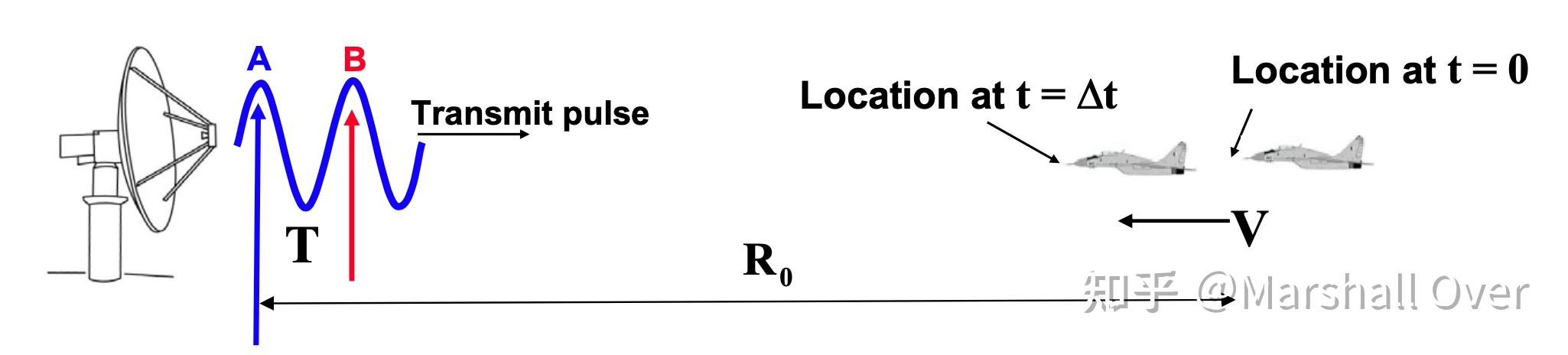
<img src="https://pic1.zhimg.com/v2-26bf2fa6b842906c27d31f46f694207c_b.jpg" data-caption="" data-size="normal" data-rawwidth="2040" data-rawheight="1200" class="origin_image zh-lightbox-thumb" width="2040" data-original="https://pic1.zhimg.com/v2-26bf2fa6b842906c27d31f46f694207c_r.jpg"/> 多普勒频移:
<img src="https://pic1.zhimg.com/v2-bea645bdc7d0e957ff2738631085adc8_b.jpg" data-caption="" data-size="normal" data-rawwidth="2050" data-rawheight="464" class="origin_image zh-lightbox-thumb" width="2050" data-original="https://pic1.zhimg.com/v2-bea645bdc7d0e957ff2738631085adc8_r.jpg"/> \begin{cases} t_A = \frac{2R_0}{c+V}\\ t_B = T + \frac{2(R_0-VT)}{c+V} \end{cases} \Rightarrow T_R = T[\frac{c-V}{c+V}] \Rightarrow f_R =f_0[\frac{c+V}{c-V}]=f_0[\frac{1+\frac{V}{c}}{1-\frac{V}{c}}] \tag{1} V<< c \frac{1}{1-\frac{V}{c}}=1+\frac{V}{c}-(\frac{V}{c})^2+\cdots \tag{2} f_R \approx f_0 + \frac{2V}{c/f_0} \Rightarrow f_d = \pm\frac{2V}{c/f_0}\tag{3} Christian Andreas Doppler :多普勒1803年11月29日出生于奥地利 萨尔茨堡 的一个石匠家族。曾在维也纳工学院 学习。1841年成为布拉格理工学院 的数学教授。1850年,多普勒担任维也纳大学 物理学院的首任院长。1853年在意大利 的威尼斯 去世,终年49岁。
<img src="https://pic4.zhimg.com/v2-45c00050f2920581bd6af37c03b3c9a3_b.jpg" data-size="normal" data-rawwidth="499" data-rawheight="640" class="origin_image zh-lightbox-thumb" width="499" data-original="https://pic4.zhimg.com/v2-45c00050f2920581bd6af37c03b3c9a3_r.jpg"/> Christian Andreas Doppler 多普勒于1842年提出了多普勒效应 ,即:当观测者与波源发生相对运动时,所接收的波 的频率 会发生变化。这个效应后来通过聆听行进中的火车 上演奏的音乐得到证实。多普勒试图用此来解释双星 的颜色变化。现在这一效应广泛应用于光学 、天文学 、气象学 、医学 诊断和日常生活等诸多方面。
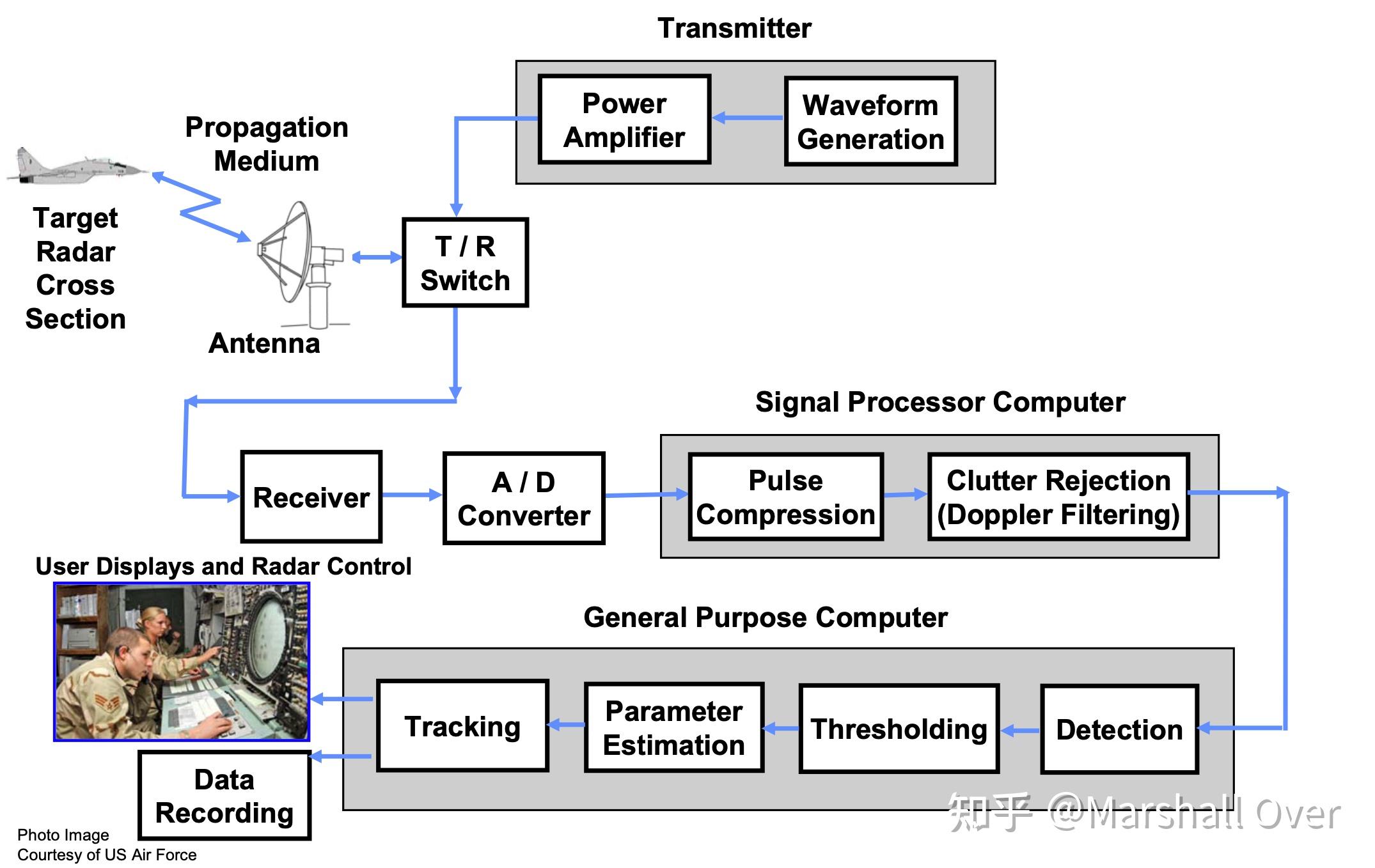
雷达系统框图:
<img src="https://pic3.zhimg.com/v2-341223f8d96ec67384a2c7032a7c2e02_b.jpg" data-caption="" data-size="normal" data-rawwidth="2150" data-rawheight="1358" class="origin_image zh-lightbox-thumb" width="2150" data-original="https://pic3.zhimg.com/v2-341223f8d96ec67384a2c7032a7c2e02_r.jpg"/> 3 总结讨论 下节继续介绍雷达波长和频率划分、雷达分类和对本课程内容的概述。
4 参考文献 [1] 百度翻译
[2] MIT 公开课: Radar Systems Engineering
[3] 维基百科









 浙公网安备 33010602011771号
浙公网安备 33010602011771号