0 写在前面 人字有两笔,一撇写前半生,一捺写后半生,前半生写执着,后半生写释怀;人生,不念过往,不畏将来。
运动目标显示 (Moving Target Indicator ,MTI)和脉冲多普勒 (Pulsed Doppler ,PD)处理使用多普勒来抑制杂波并增强对运动目标的检测;较小的目标需要更多的杂波抑制。
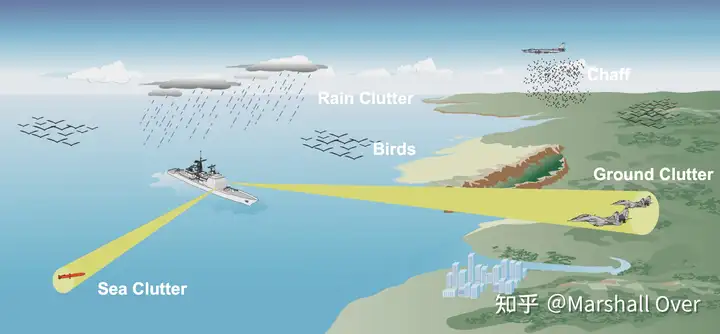
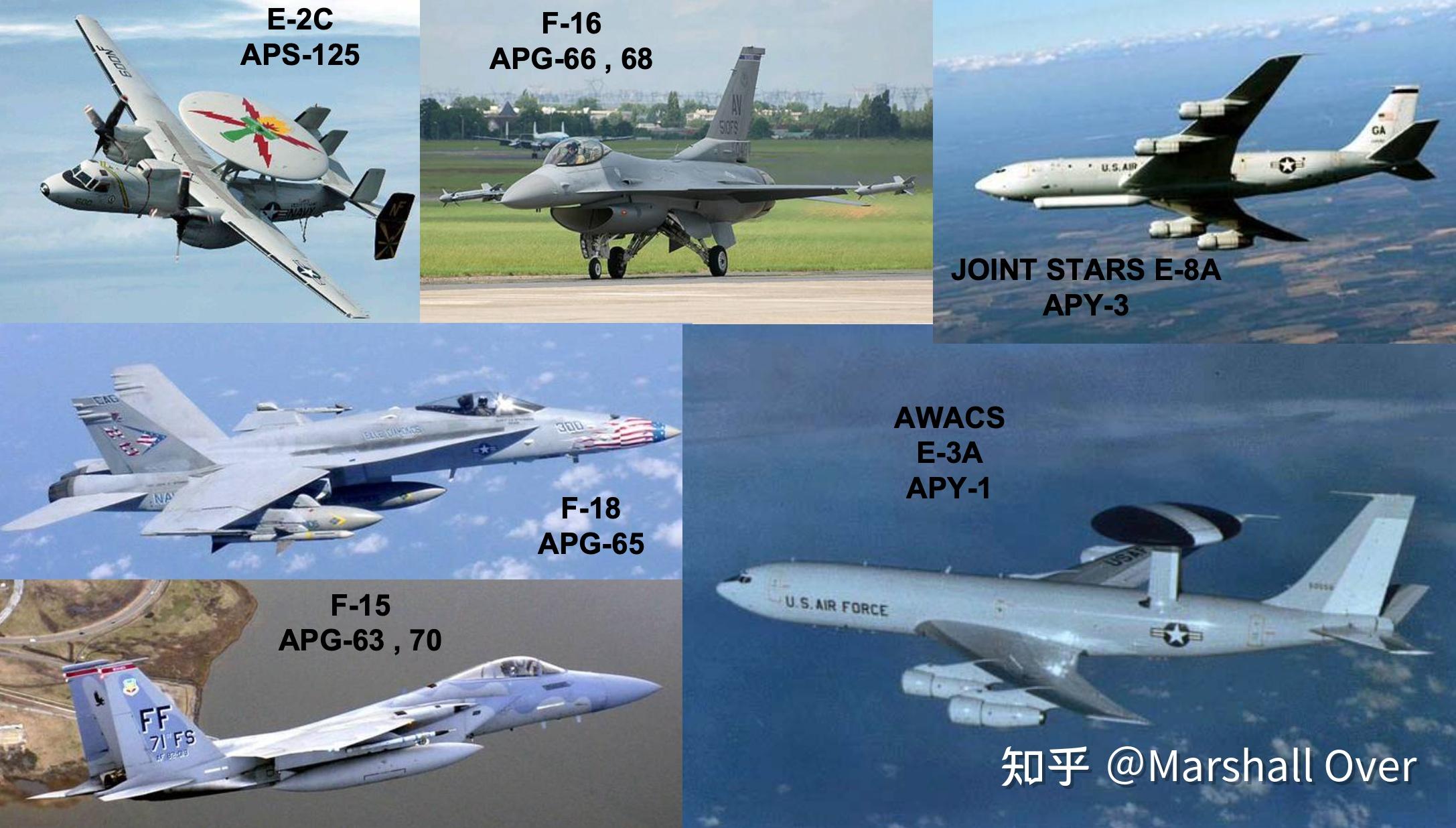
海军防空场景:
<img src="https://pic1.zhimg.com/v2-50bc162b4e6737e03086ded3ffa576ec_b.jpg" data-caption="" data-size="normal" data-rawwidth="2140" data-rawheight="992" class="origin_image zh-lightbox-thumb" width="2140" data-original="https://pic1.zhimg.com/v2-50bc162b4e6737e03086ded3ffa576ec_r.jpg"/> 1 内容介绍 MTI显示: 将目标从杂波中分离;利用短波形(二脉冲或三脉冲);无目标速度估计。
PD技术: 除了消除杂波外,还可以将目标分离到不同的速度范围;提供目标速度的有效估计;使用长波形(许多脉冲,数十到数千个脉冲)。
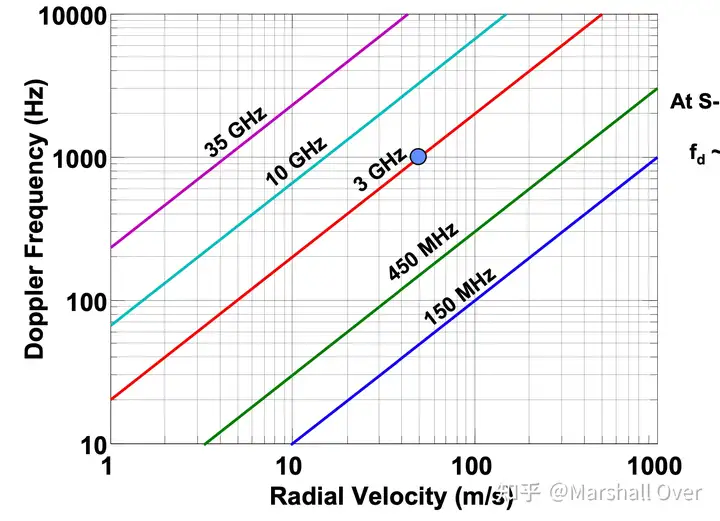
多普勒频率 :f d = 2 V / λ f_d=2V/\lambda f c = 2800 M H z f_c = 2800MHz V = 40 m / s V = 40m/s f d = 1 k H z f_d=1kHz
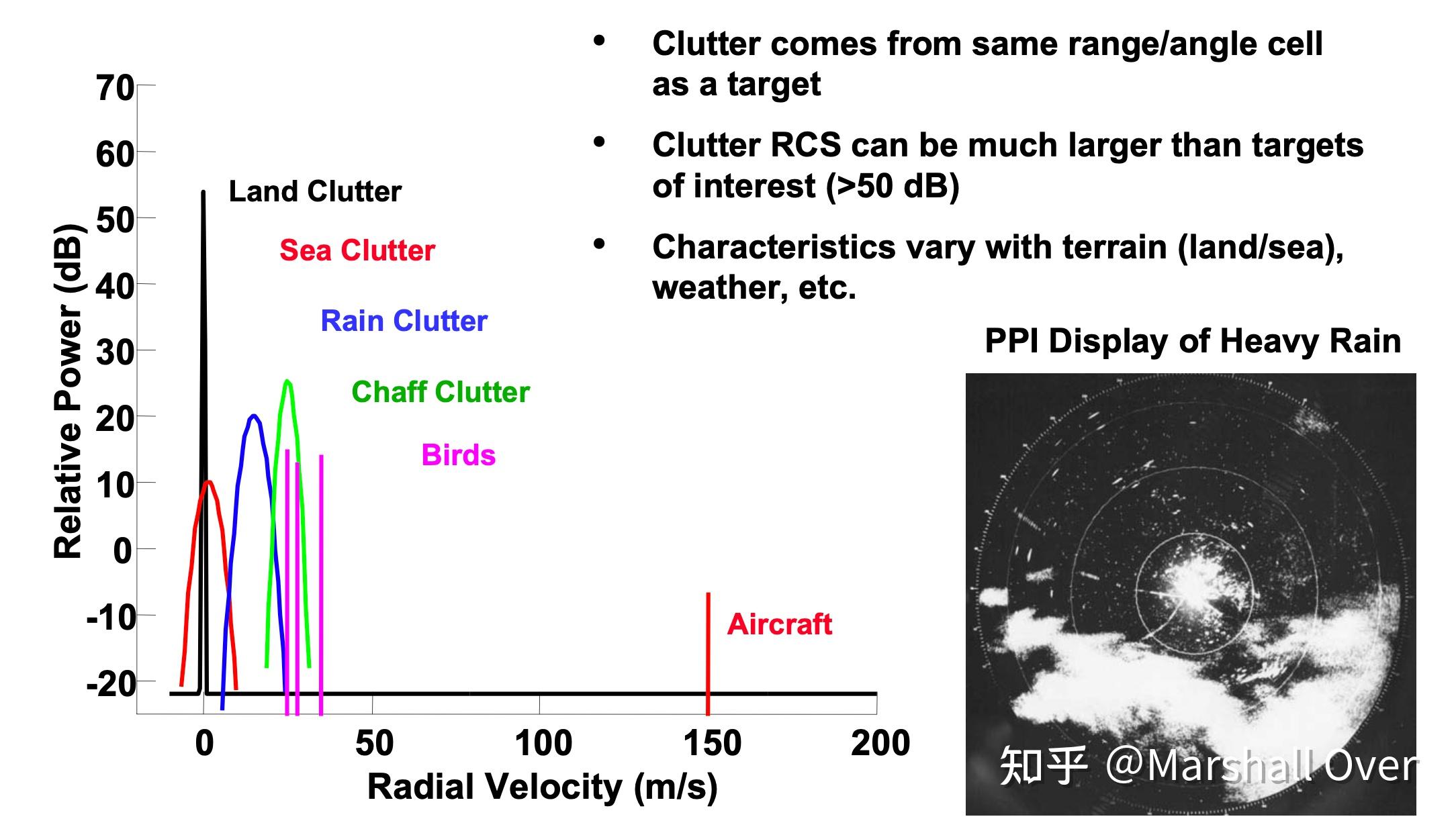
<img src="https://pic1.zhimg.com/v2-20f8d5911bb3db9b570aefe61fd411dc_b.jpg" data-caption="" data-size="normal" data-rawwidth="1724" data-rawheight="1248" class="origin_image zh-lightbox-thumb" width="1724" data-original="https://pic1.zhimg.com/v2-20f8d5911bb3db9b570aefe61fd411dc_r.jpg"/> 杂波谱例子: 杂波来自与目标相同的距离/角度单元;杂波RCS可能比感兴趣的目标大得多(>50 dB);特性随地形(陆地/海洋)、天气等而变化。
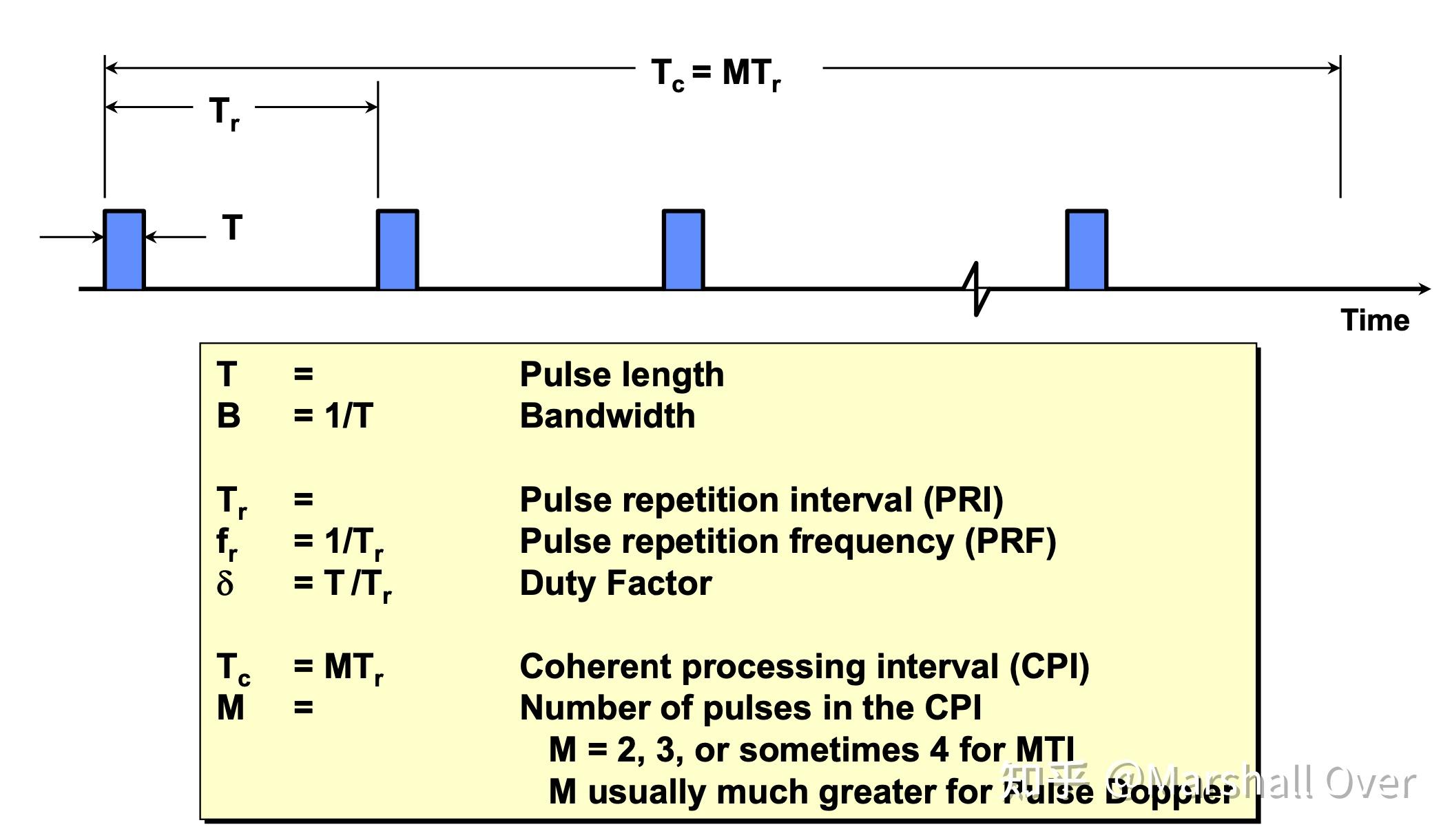
<img src="https://pic3.zhimg.com/v2-eeaf2b7146de04f1b4c2a21016b6d60e_b.jpg" data-caption="" data-size="normal" data-rawwidth="2168" data-rawheight="1232" class="origin_image zh-lightbox-thumb" width="2168" data-original="https://pic3.zhimg.com/v2-eeaf2b7146de04f1b4c2a21016b6d60e_r.jpg"/> MTI和PD波形 :
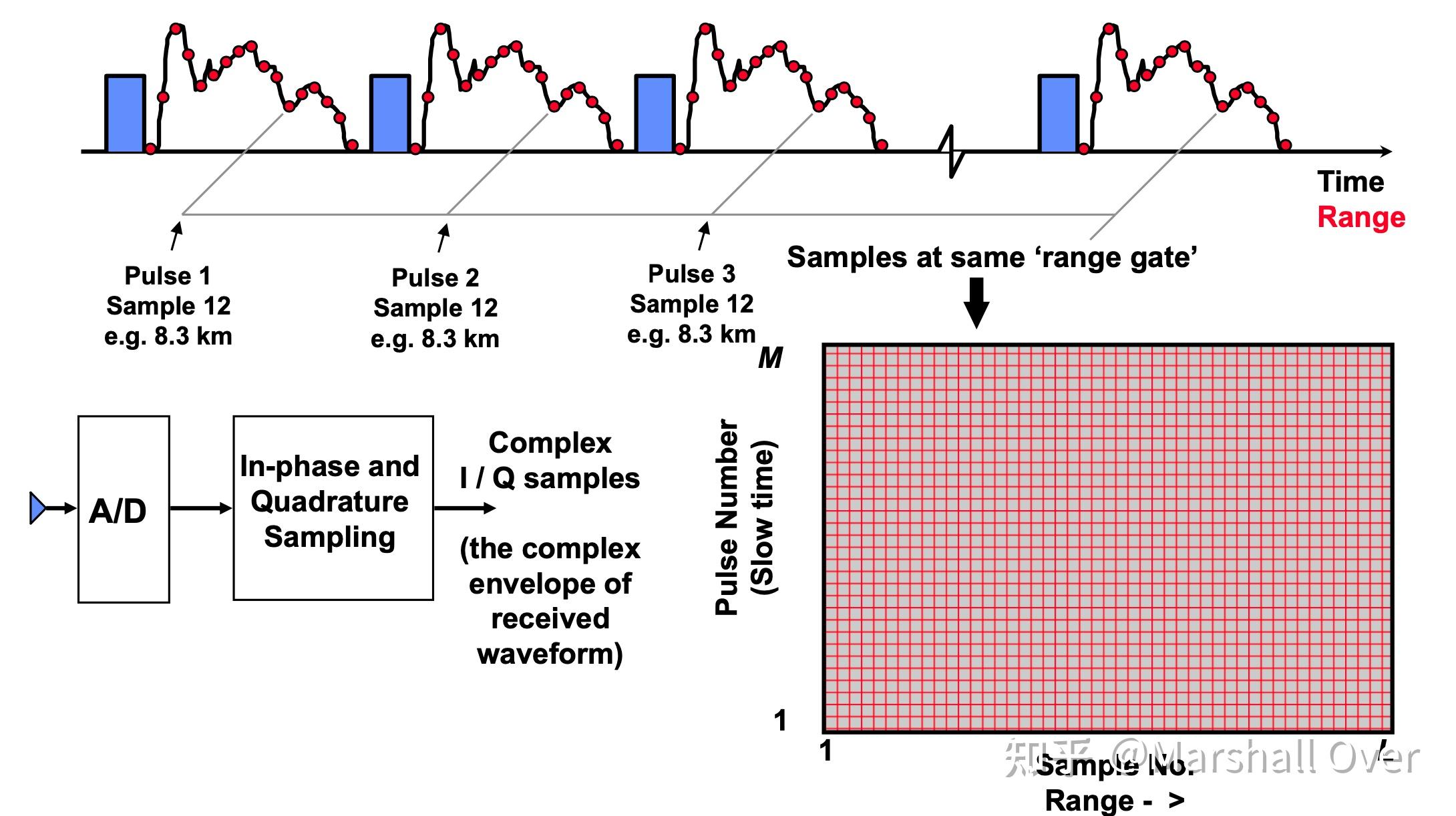
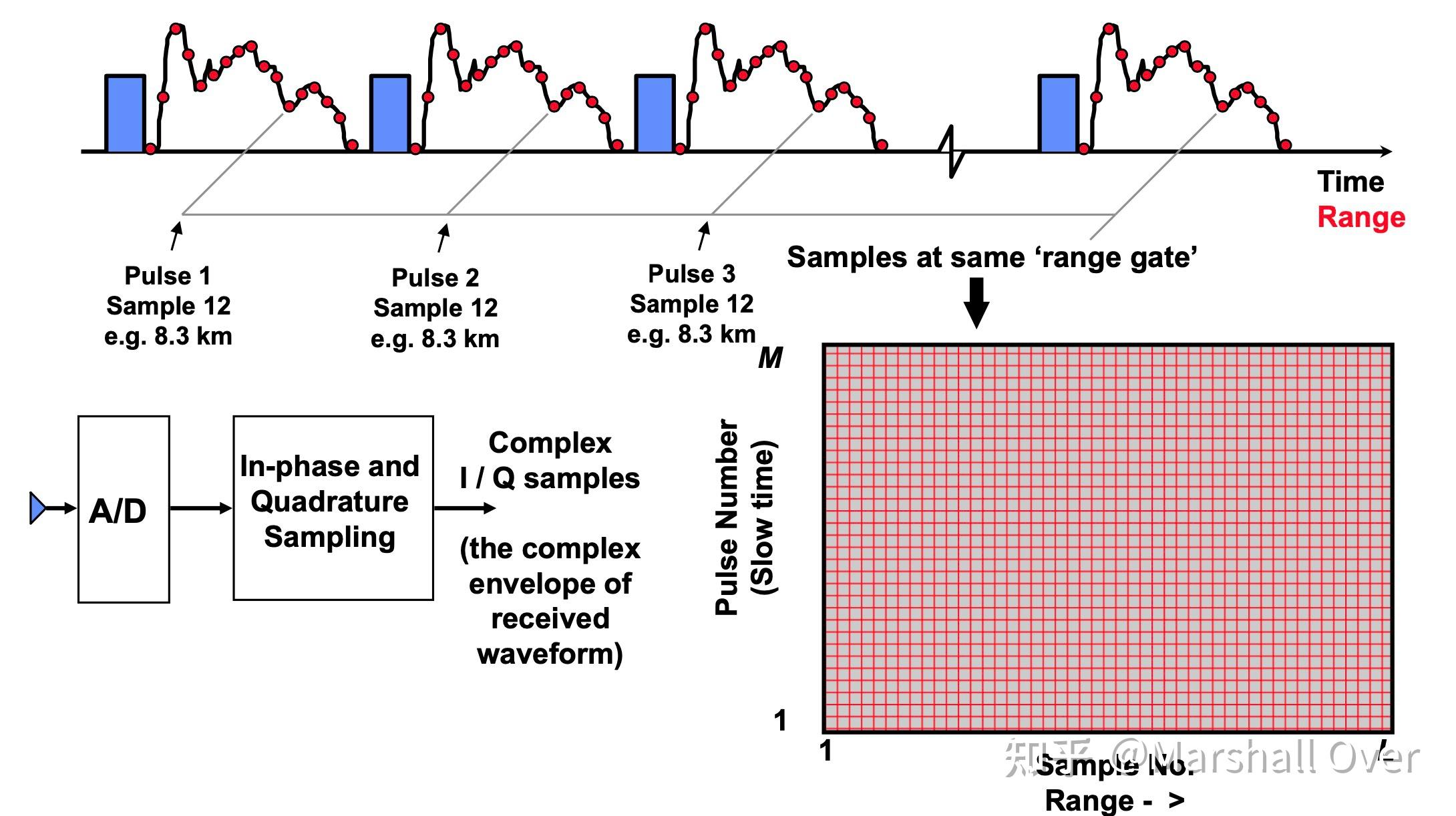
<img src="https://pic1.zhimg.com/v2-b8e13fd8e5c38e0f307a7b570bdc8534_b.jpg" data-caption="" data-size="normal" data-rawwidth="2108" data-rawheight="1220" class="origin_image zh-lightbox-thumb" width="2108" data-original="https://pic1.zhimg.com/v2-b8e13fd8e5c38e0f307a7b570bdc8534_r.jpg"/> 数据收集:
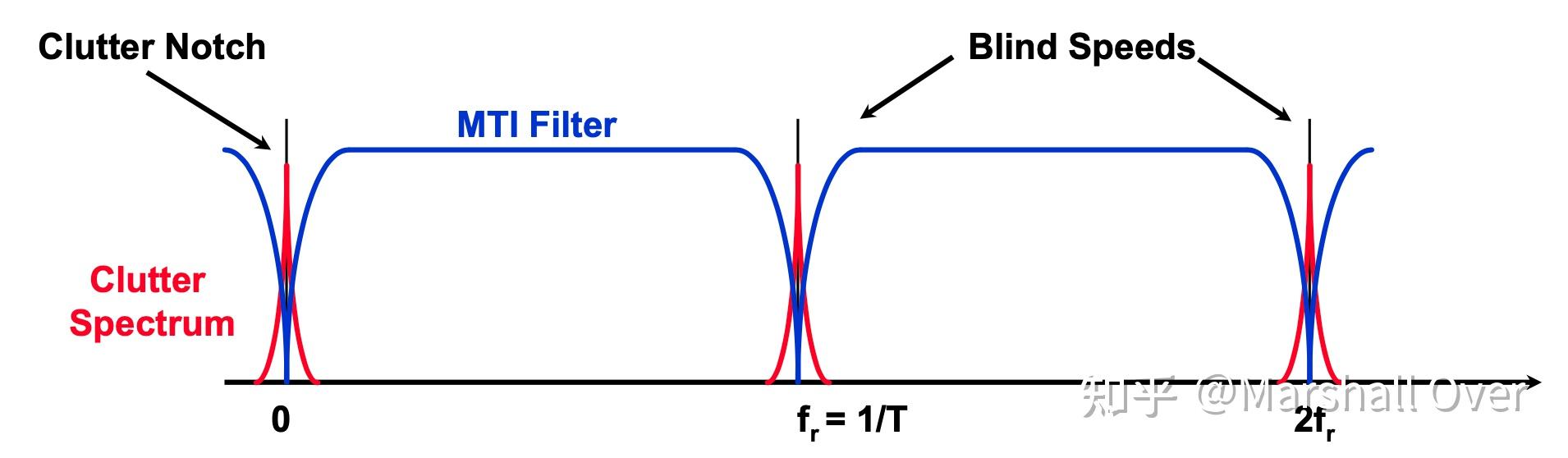
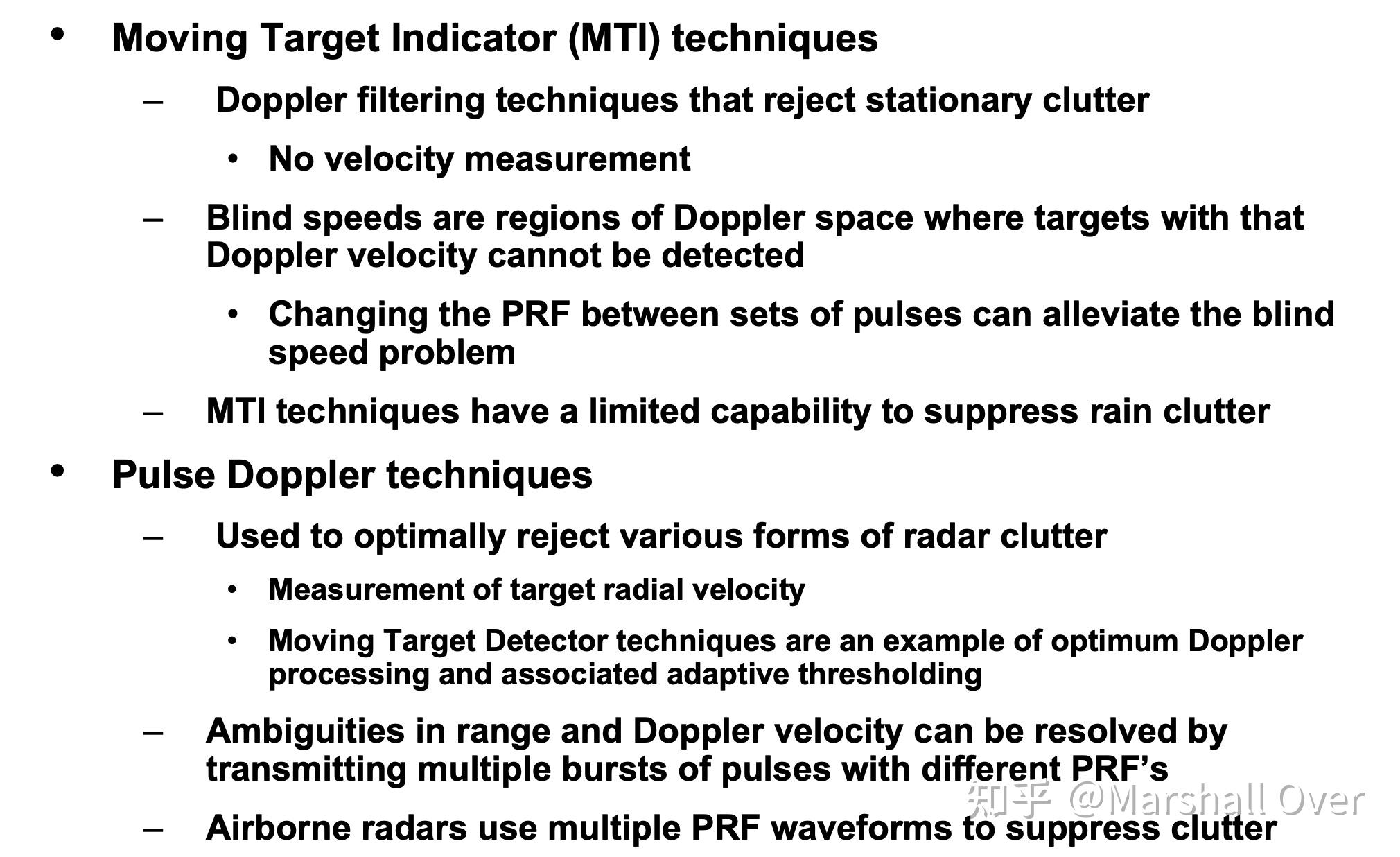
<img src="https://pic2.zhimg.com/v2-bb238ffb65ece75e1d3d26ab2729babd_b.jpg" data-caption="" data-size="normal" data-rawwidth="2180" data-rawheight="1222" class="origin_image zh-lightbox-thumb" width="2180" data-original="https://pic2.zhimg.com/v2-bb238ffb65ece75e1d3d26ab2729babd_r.jpg"/> 2 MTI技术 MIT处理: 陷口多普勒频谱(Notch out Doppler spectrum )被杂波占据,在其他地方提供宽的多普勒通道;盲目速度出现在脉冲重复频率的倍数。
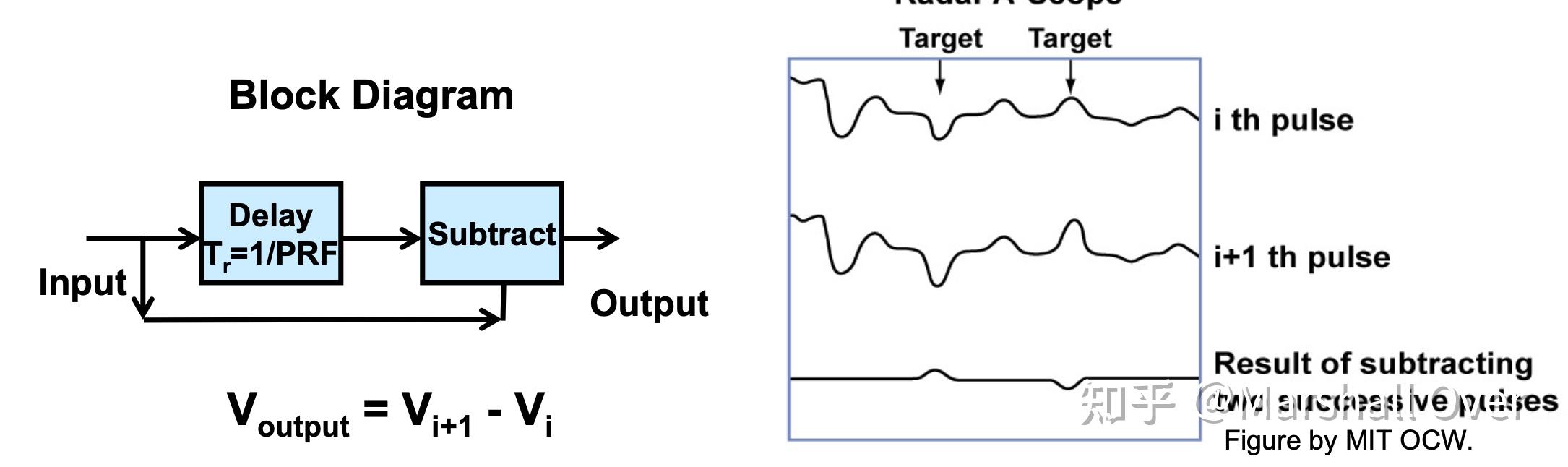
<img src="https://pic1.zhimg.com/v2-5c63970d35bf81d8f4fb488b004333a4_b.jpg" data-caption="" data-size="normal" data-rawwidth="1910" data-rawheight="558" class="origin_image zh-lightbox-thumb" width="1910" data-original="https://pic1.zhimg.com/v2-5c63970d35bf81d8f4fb488b004333a4_r.jpg"/> 两脉冲对消:
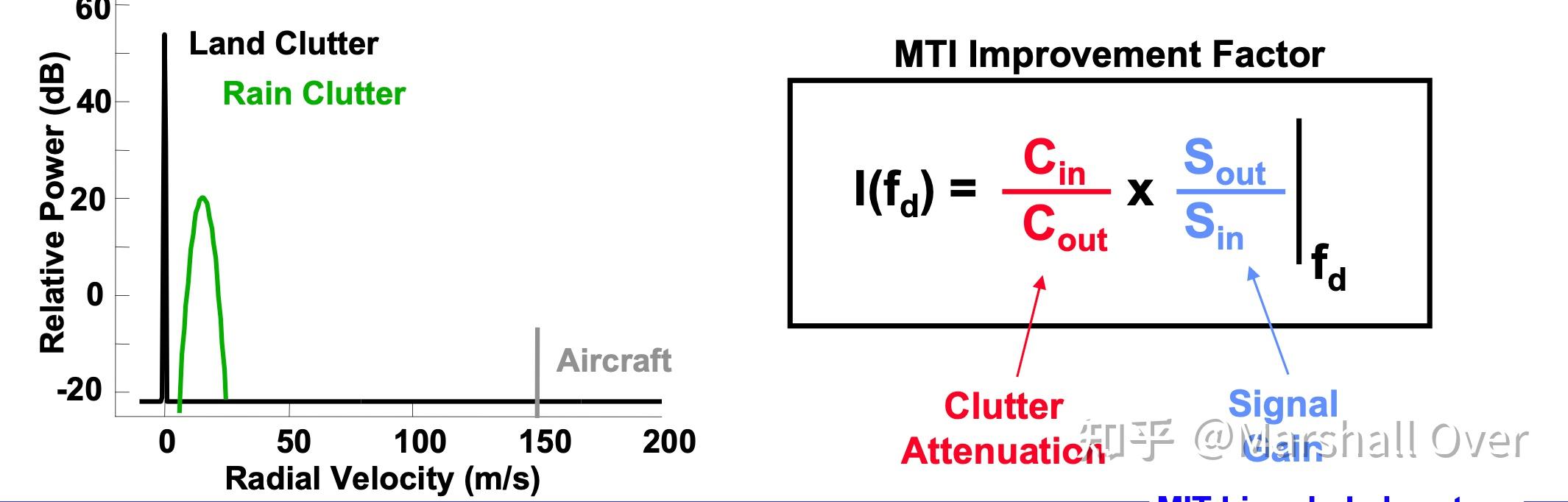
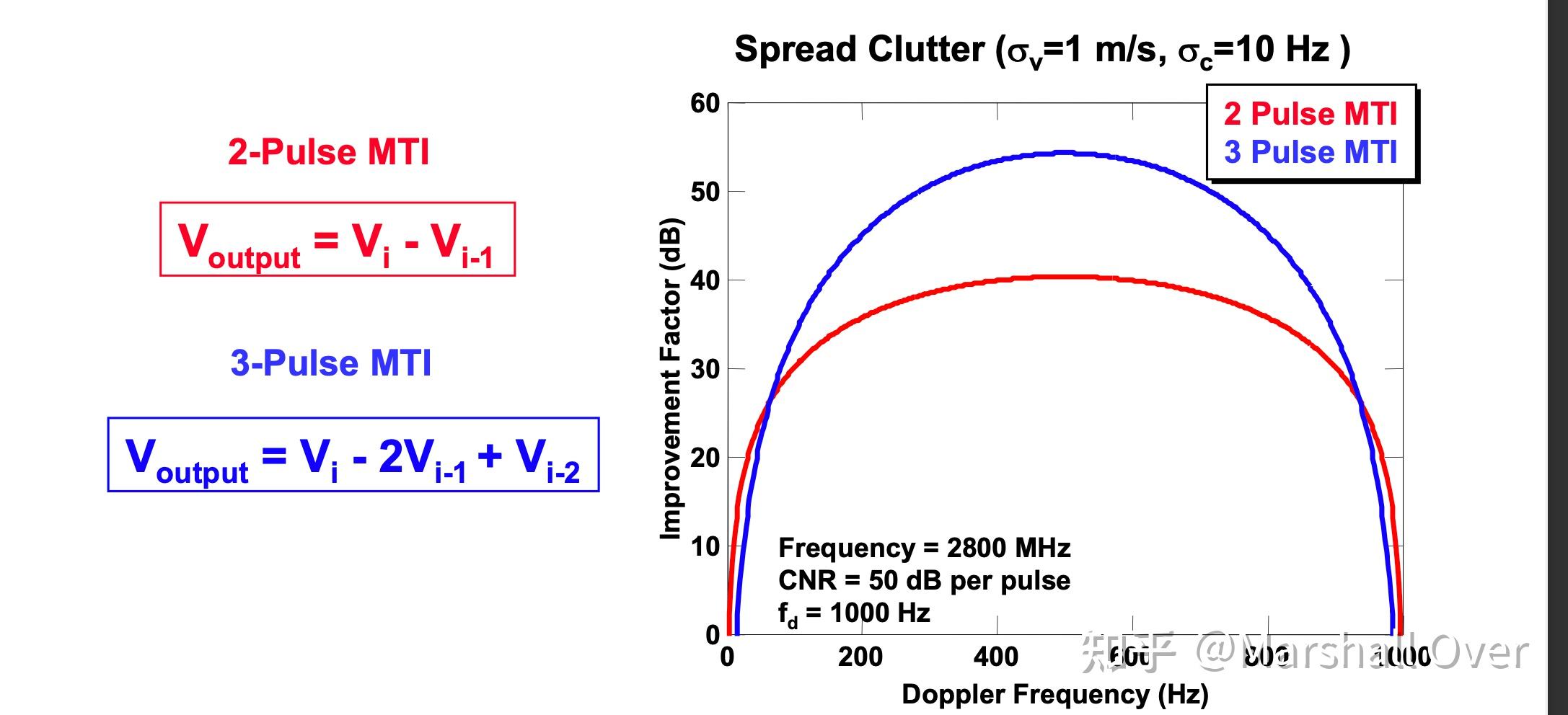
固定杂波回波: 如果从前一个脉冲中减去当前脉冲,则固定杂波回波将被抵消,不会被检测到;运动目标: 由于多普勒频移,运动目标的振幅从一个脉冲到下一个脉冲会发生变化。如果从另一个脉冲中减去一个脉冲,结果将是未消除的残差。<img src="https://pic2.zhimg.com/v2-99abc468fb2c114fbcbbad69102e66c1_b.jpg" data-caption="" data-size="normal" data-rawwidth="2170" data-rawheight="646" class="origin_image zh-lightbox-thumb" width="2170" data-original="https://pic2.zhimg.com/v2-99abc468fb2c114fbcbbad69102e66c1_r.jpg"/> MTI改善因子 :在MTI处理后多普勒处的输出信杂比与输入信杂比之比。 I(f_d)=\frac{(signal/clutter)_{out}}{(signal/clutter)_{in}}|_{f_d}\tag{1}
<img src="https://pic3.zhimg.com/v2-915c9400b0e85fe6af2ece7835ccacae_b.jpg" data-caption="" data-size="normal" data-rawwidth="2130" data-rawheight="682" class="origin_image zh-lightbox-thumb" width="2130" data-original="https://pic3.zhimg.com/v2-915c9400b0e85fe6af2ece7835ccacae_r.jpg"/> MTI Improvement Factor Examples :三脉冲消除器提供更宽的杂波陷波和更大的杂波衰减。
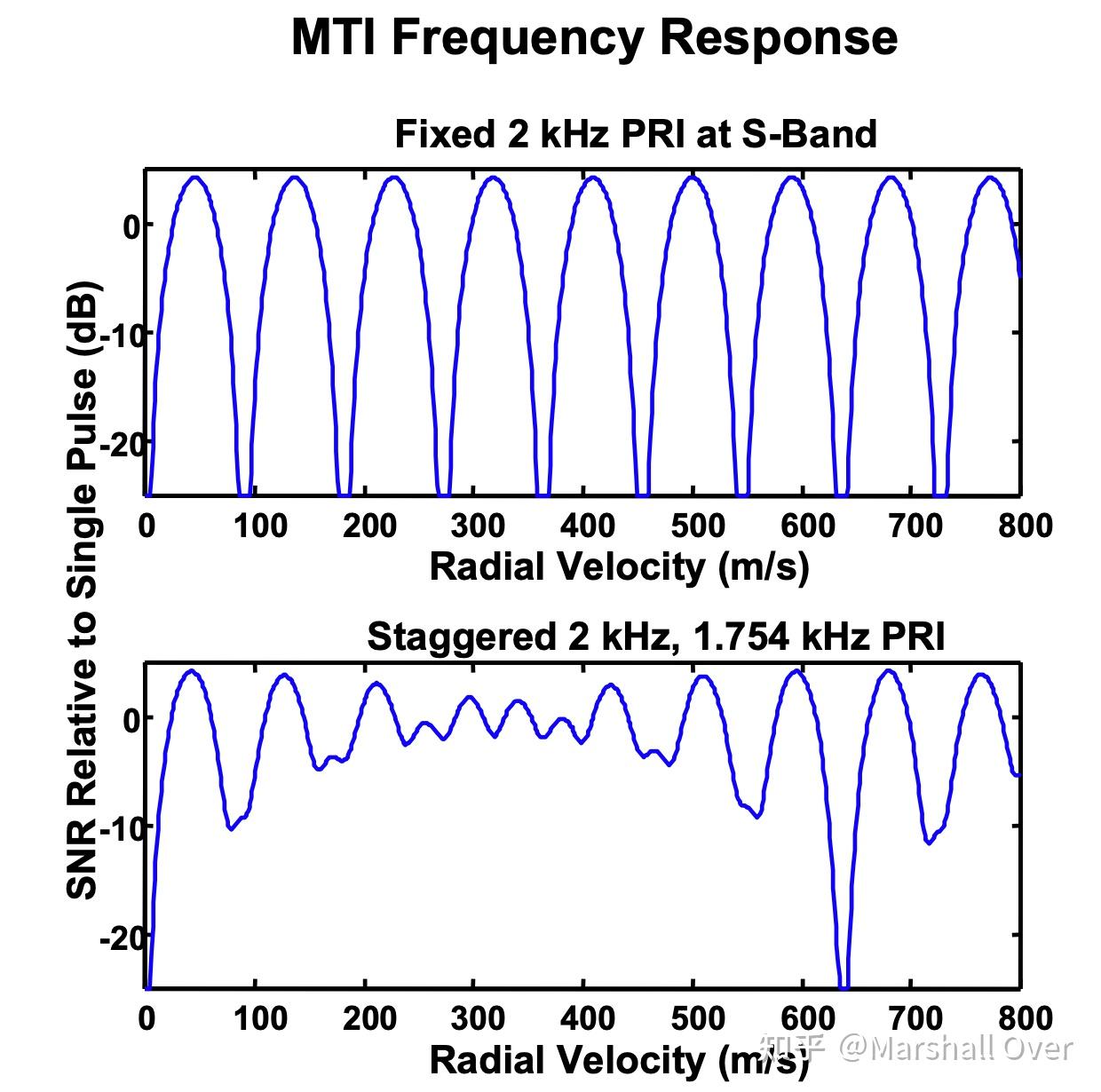
<img src="https://pic4.zhimg.com/v2-4e210025472f7b7ef1ddda8bf36b16a7_b.jpg" data-caption="" data-size="normal" data-rawwidth="2174" data-rawheight="992" class="origin_image zh-lightbox-thumb" width="2174" data-original="https://pic4.zhimg.com/v2-4e210025472f7b7ef1ddda8bf36b16a7_r.jpg"/> 交错重频以提高盲速: 交错或改变脉冲之间的时间将提高盲速;尽管交错的重频消除了在恒定重频下可能获得的盲速,但会有一个新的更高的盲速。
<img src="https://pic2.zhimg.com/v2-3a8c9373a5350799b42f92647d0fc195_b.jpg" data-caption="" data-size="normal" data-rawwidth="1240" data-rawheight="1230" class="origin_image zh-lightbox-thumb" width="1240" data-original="https://pic2.zhimg.com/v2-3a8c9373a5350799b42f92647d0fc195_r.jpg"/> 3 PD技术 数据收集:
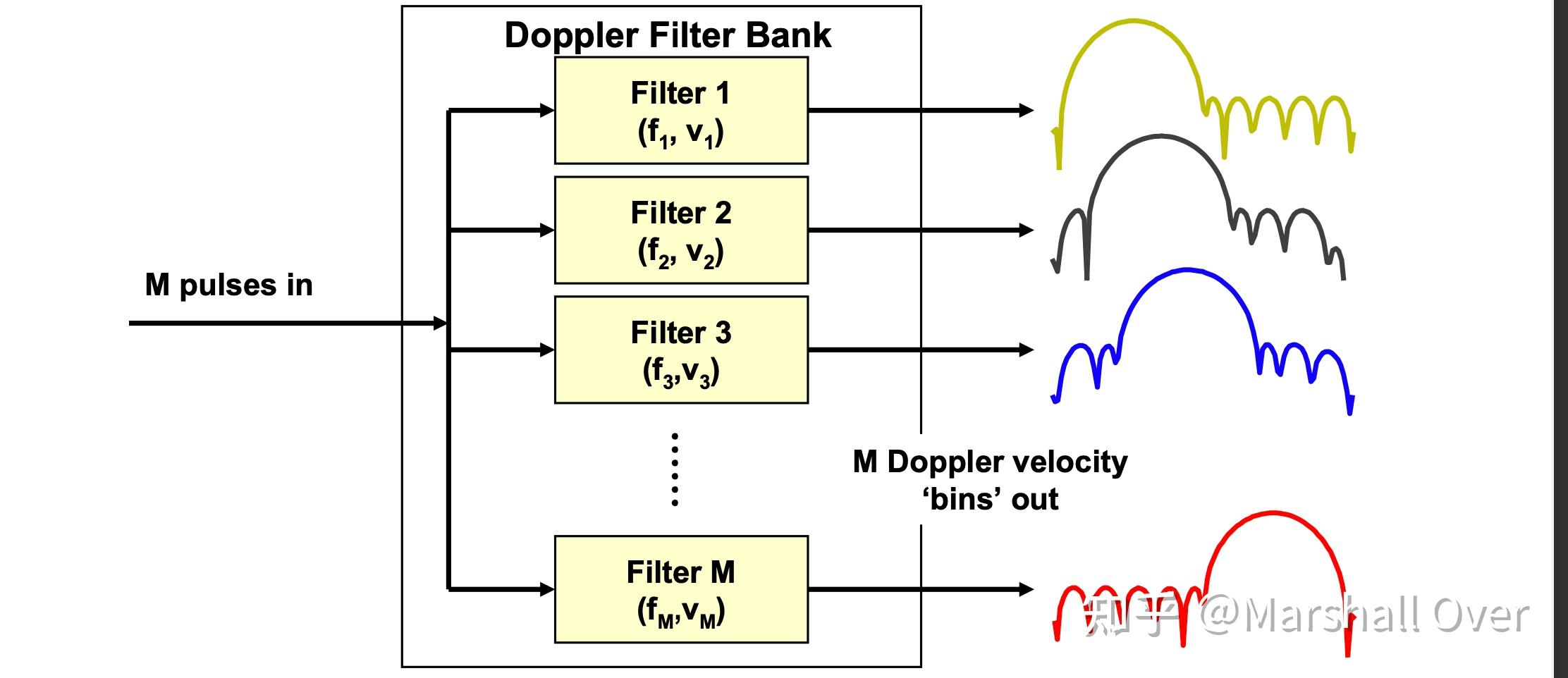
<img src="https://pic4.zhimg.com/v2-b838b92be1423294fad47ca971bed753_b.jpg" data-caption="" data-size="normal" data-rawwidth="2180" data-rawheight="1222" class="origin_image zh-lightbox-thumb" width="2180" data-original="https://pic4.zhimg.com/v2-b838b92be1423294fad47ca971bed753_r.jpg"/> 多普勒处理: 在相干积累周期(CPI)内所有脉冲进行相干积累;杂波抑制;将目标分解为不同的速度段,并允许精细目标径向速度估计。
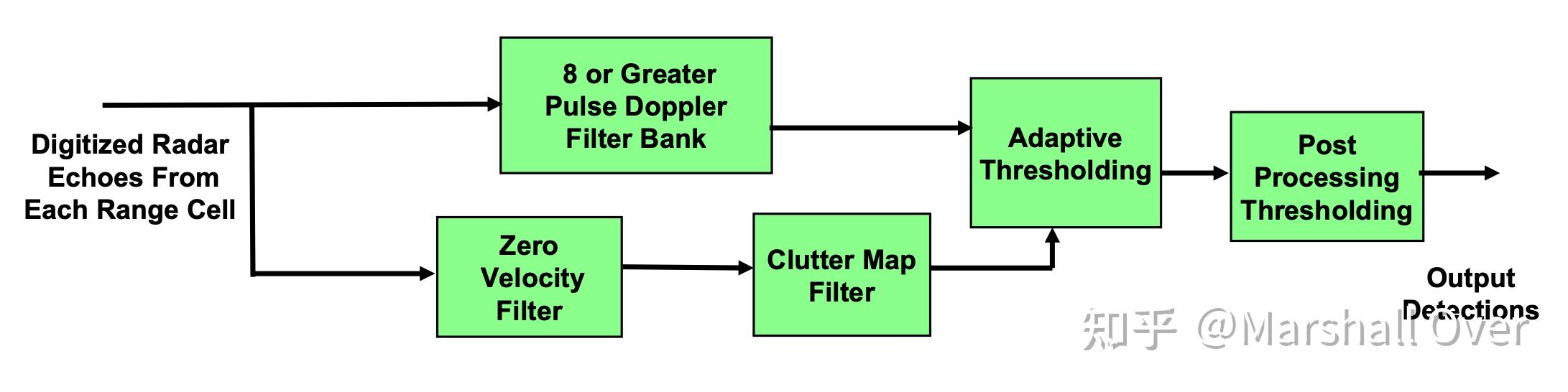
<img src="https://pic1.zhimg.com/v2-5e24870762893f2bdf04e99d2743b4a0_b.jpg" data-caption="" data-size="normal" data-rawwidth="2224" data-rawheight="962" class="origin_image zh-lightbox-thumb" width="2224" data-original="https://pic1.zhimg.com/v2-5e24870762893f2bdf04e99d2743b4a0_r.jpg"/> 运动目标检测(Moving Target Detector ,MTD) :对具有细粒度杂波图的8个或更多脉冲的组进行脉冲多普勒滤波;使用多普勒滤波器组和2个PRF在地面杂波和/或降雨中检测飞机;鸟类和地面交通在后处理中被抑制,使用多普勒速度和第二个细粒度杂波图。
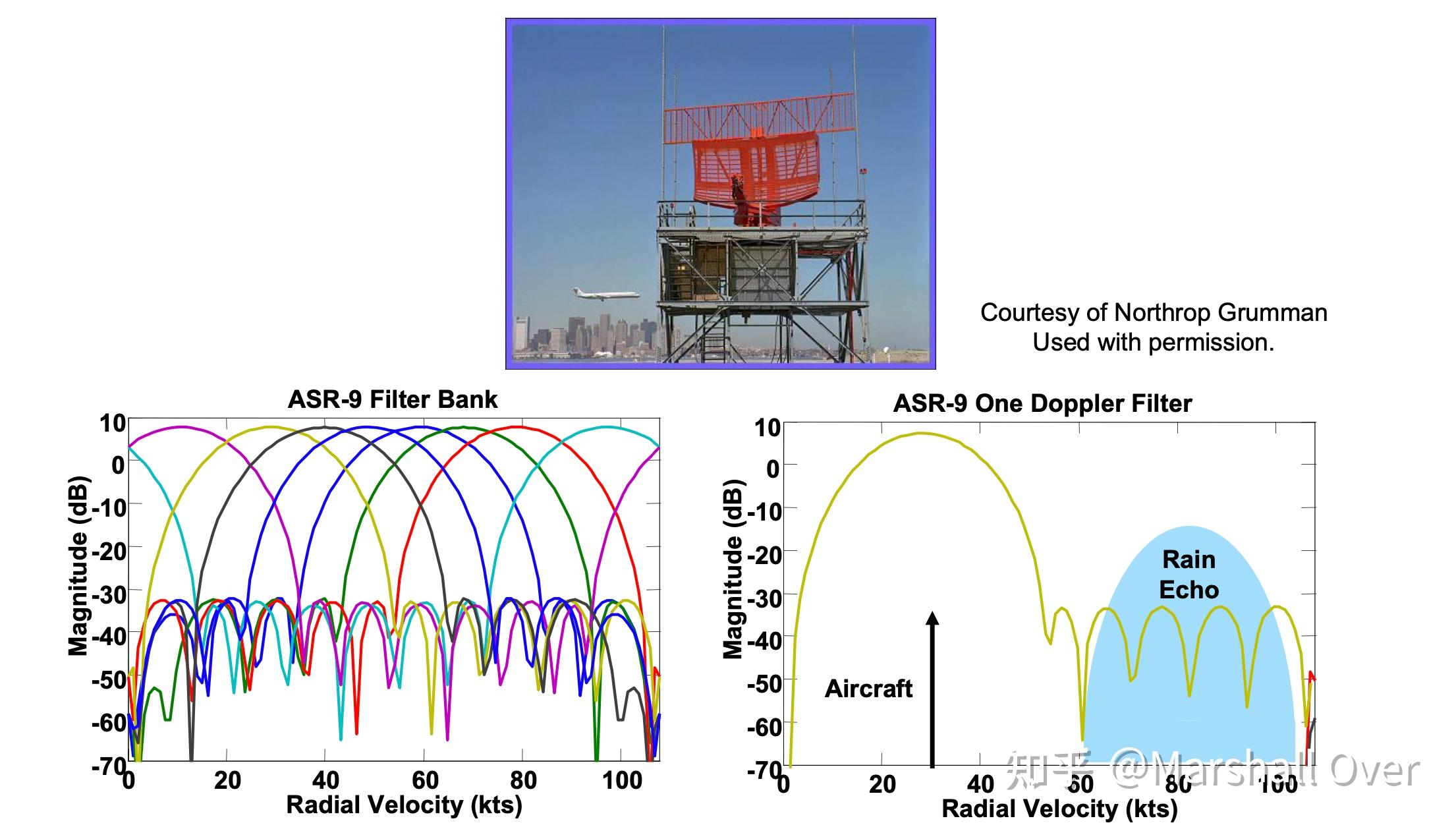
<img src="https://pic2.zhimg.com/v2-e4c8d58d3a019c0b6e2c4eff93176171_b.jpg" data-caption="" data-size="normal" data-rawwidth="2182" data-rawheight="546" class="origin_image zh-lightbox-thumb" width="2182" data-original="https://pic2.zhimg.com/v2-e4c8d58d3a019c0b6e2c4eff93176171_r.jpg"/> ASR-9 8-Pulse Filter Bank :
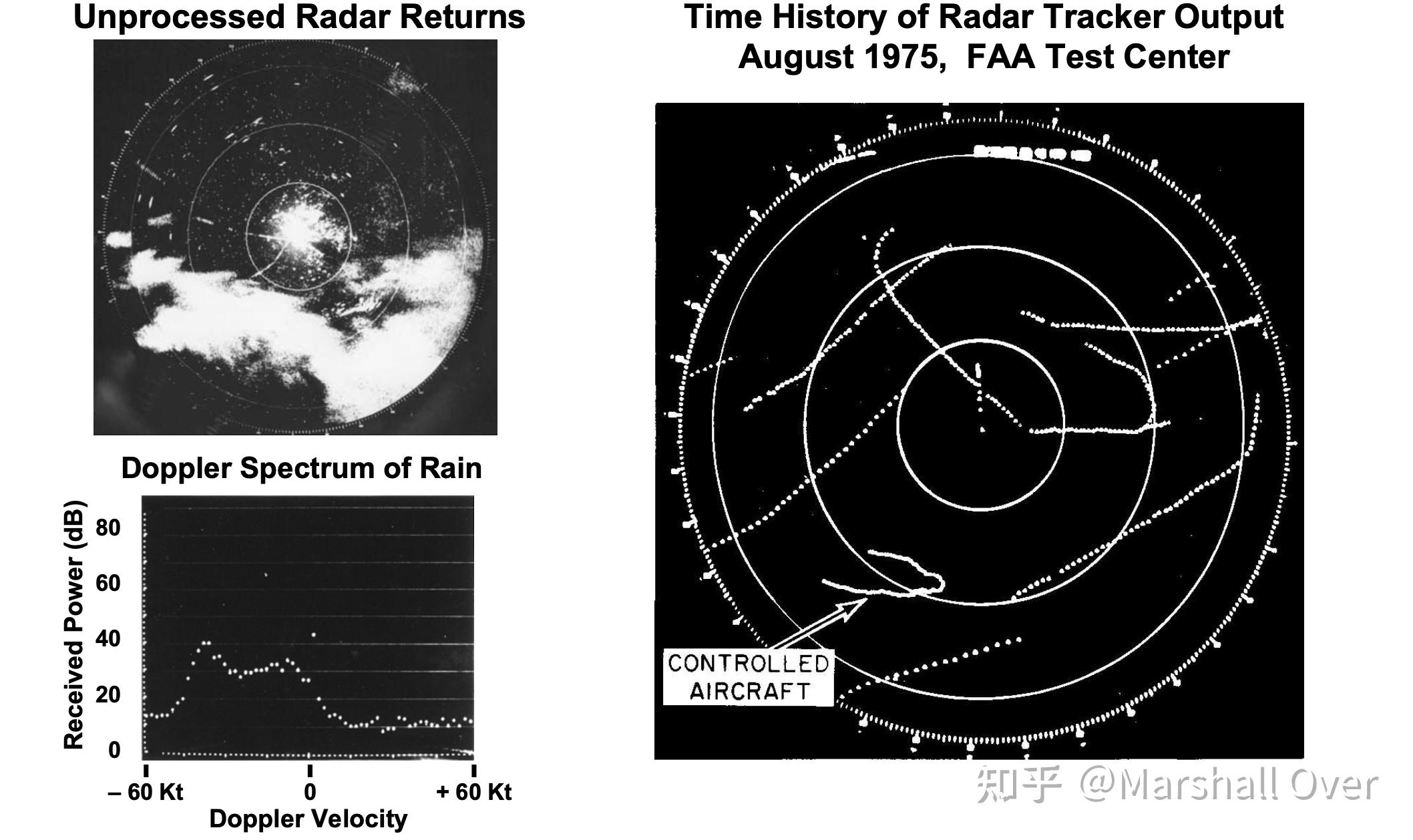
<img src="https://pic1.zhimg.com/v2-928f176c6a2876d9888eaac717ac2e00_b.jpg" data-caption="" data-size="normal" data-rawwidth="2210" data-rawheight="1258" class="origin_image zh-lightbox-thumb" width="2210" data-original="https://pic1.zhimg.com/v2-928f176c6a2876d9888eaac717ac2e00_r.jpg"/> MTD Performance in Rain :
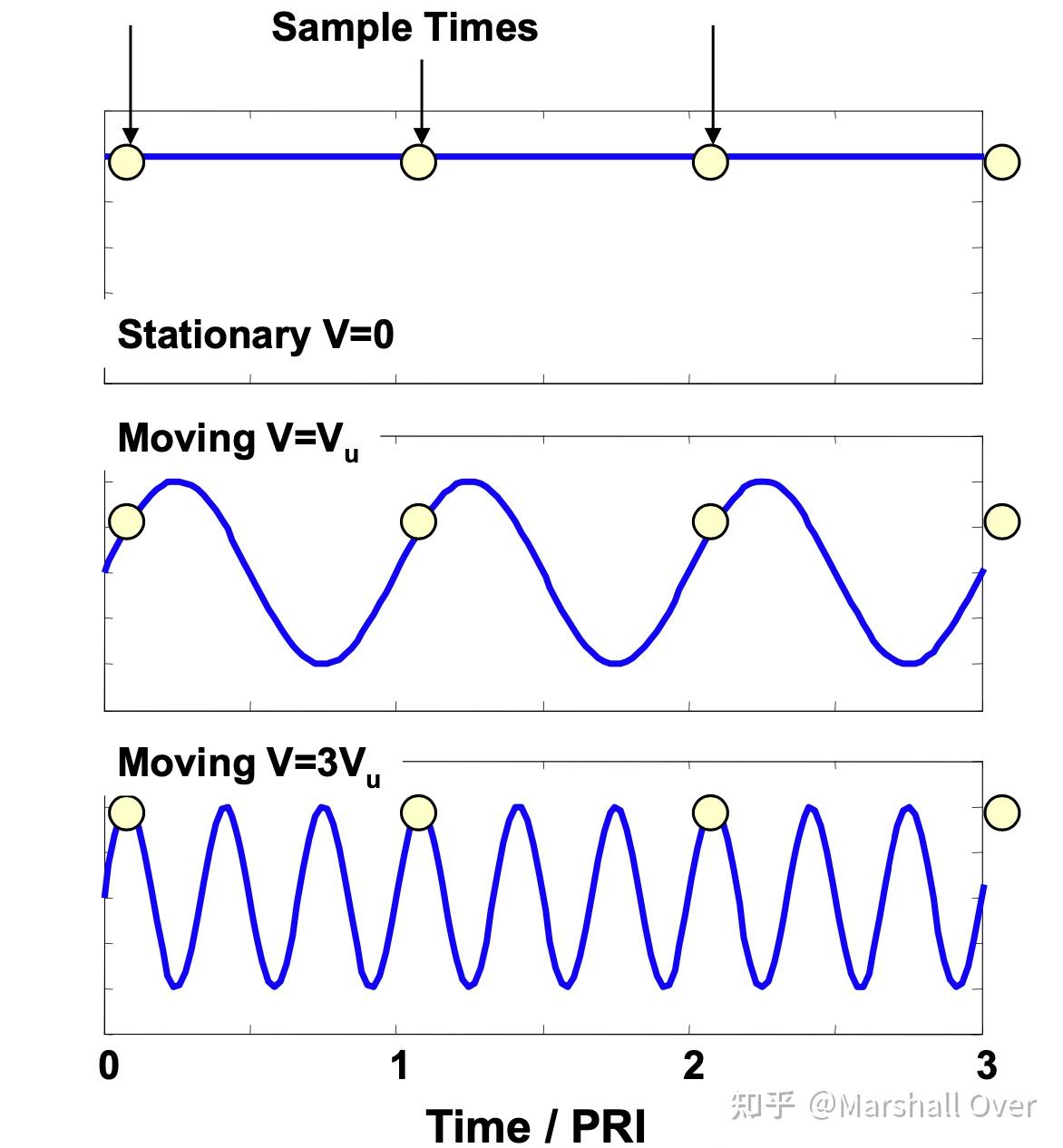
<img src="https://pic4.zhimg.com/v2-630031cc26bac124ba1e3b951aae3abf_b.jpg" data-caption="" data-size="normal" data-rawwidth="2116" data-rawheight="1258" class="origin_image zh-lightbox-thumb" width="2116" data-original="https://pic4.zhimg.com/v2-630031cc26bac124ba1e3b951aae3abf_r.jpg"/> 多普勒模糊: 脉冲多普勒波形采样目标,采样率=PRF;采样导致PRF倍数的混叠;多普勒频率为PRF整数倍的两个目标无法区分;无模糊速度:V = \lambda f_r /2
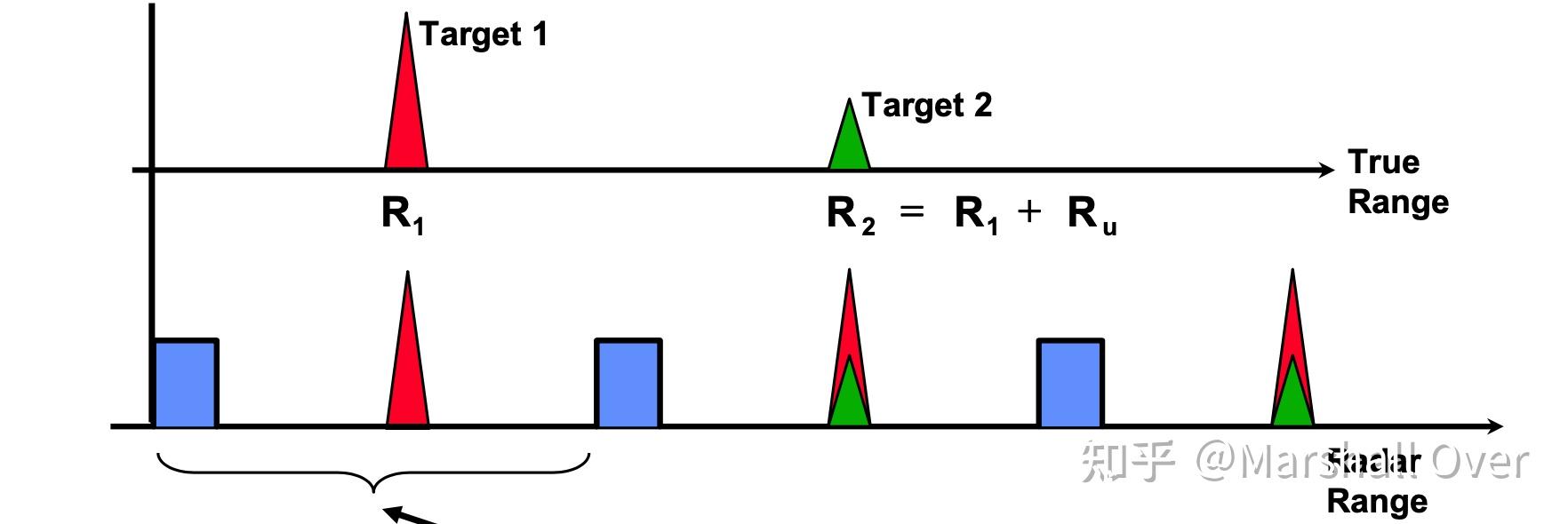
<img src="https://pic4.zhimg.com/v2-c83c5d793da1d36deb6ad9107e028503_b.jpg" data-caption="" data-size="normal" data-rawwidth="1172" data-rawheight="1266" class="origin_image zh-lightbox-thumb" width="1172" data-original="https://pic4.zhimg.com/v2-c83c5d793da1d36deb6ad9107e028503_r.jpg"/> 距离模糊 :当一个脉冲的回波在下一个脉冲之前没有全部接收到时,会出现距离模糊;强大的近距离目标(杂波)可以掩盖微弱的目标。无模糊距离:R = cT_r/2
<img src="https://pic2.zhimg.com/v2-26fd5055f820ad8c9168170b1c3556fd_b.jpg" data-caption="" data-size="normal" data-rawwidth="1764" data-rawheight="590" class="origin_image zh-lightbox-thumb" width="1764" data-original="https://pic2.zhimg.com/v2-26fd5055f820ad8c9168170b1c3556fd_r.jpg"/> 无模糊距离和多普勒速度:
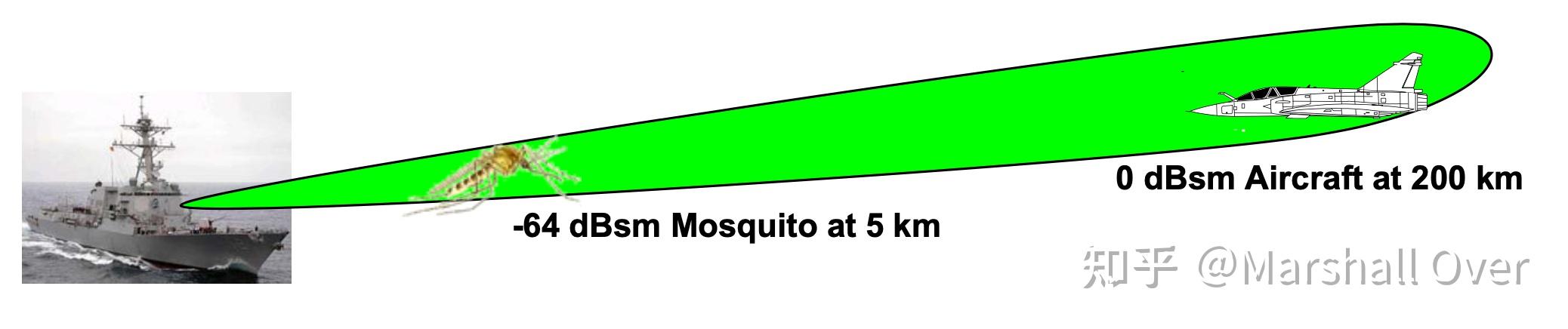
<img src="https://pic3.zhimg.com/v2-094c032ef28b42e338195780a47abb02_b.jpg" data-caption="" data-size="normal" data-rawwidth="2166" data-rawheight="1244" class="origin_image zh-lightbox-thumb" width="2166" data-original="https://pic3.zhimg.com/v2-094c032ef28b42e338195780a47abb02_r.jpg"/> 时间灵敏度控制(Sensitivity Time Control ,STC) :有意降低近距离雷达的灵敏度 ;两个“目标”回波具有相同的信噪比;R^{-4}
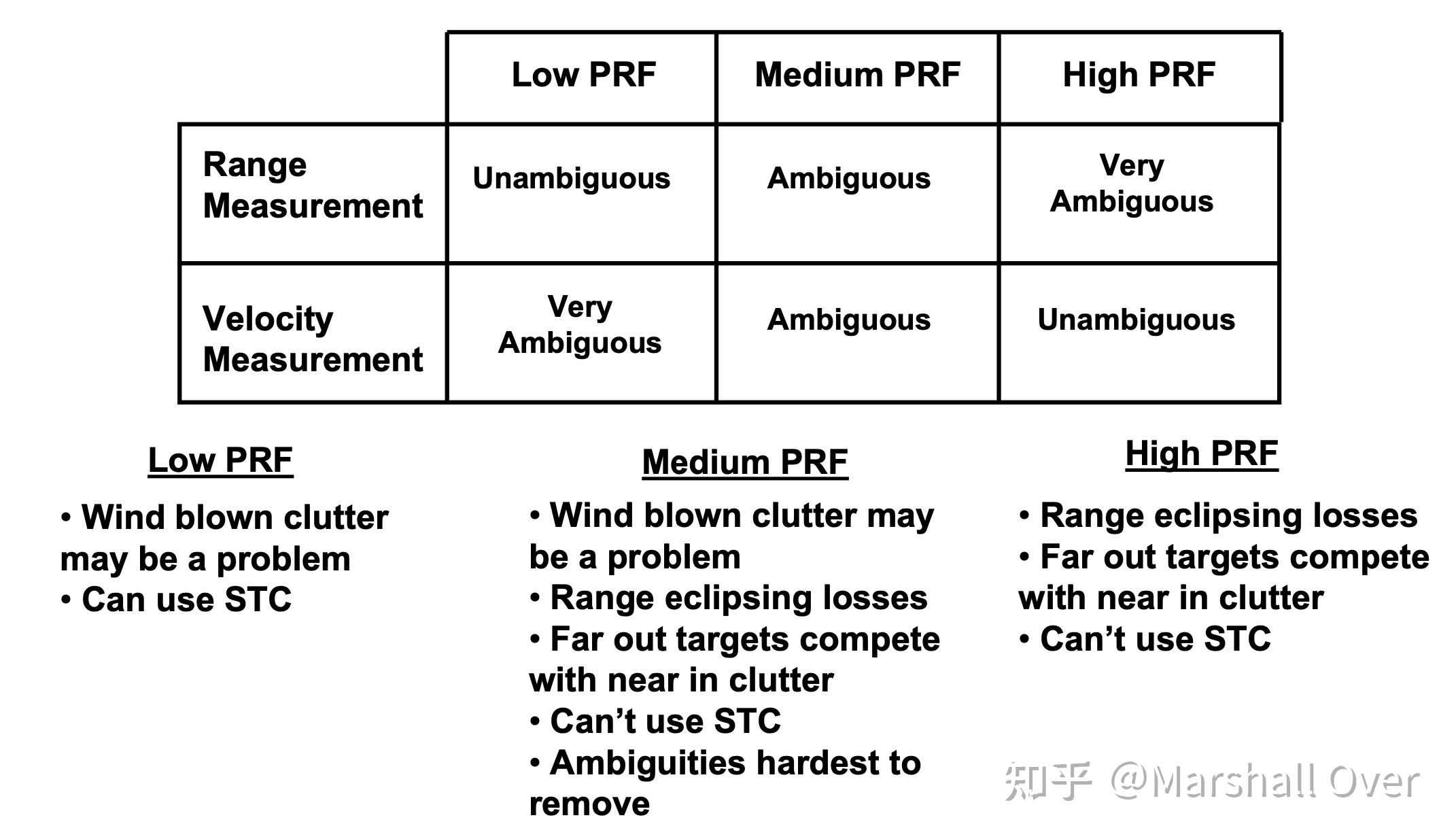
<img src="https://pic2.zhimg.com/v2-76c81e63d2385a66d8d6f77de3e239f5_b.jpg" data-caption="" data-size="normal" data-rawwidth="2076" data-rawheight="436" class="origin_image zh-lightbox-thumb" width="2076" data-original="https://pic2.zhimg.com/v2-76c81e63d2385a66d8d6f77de3e239f5_r.jpg"/> MTI和脉冲多普勒雷达的分类:
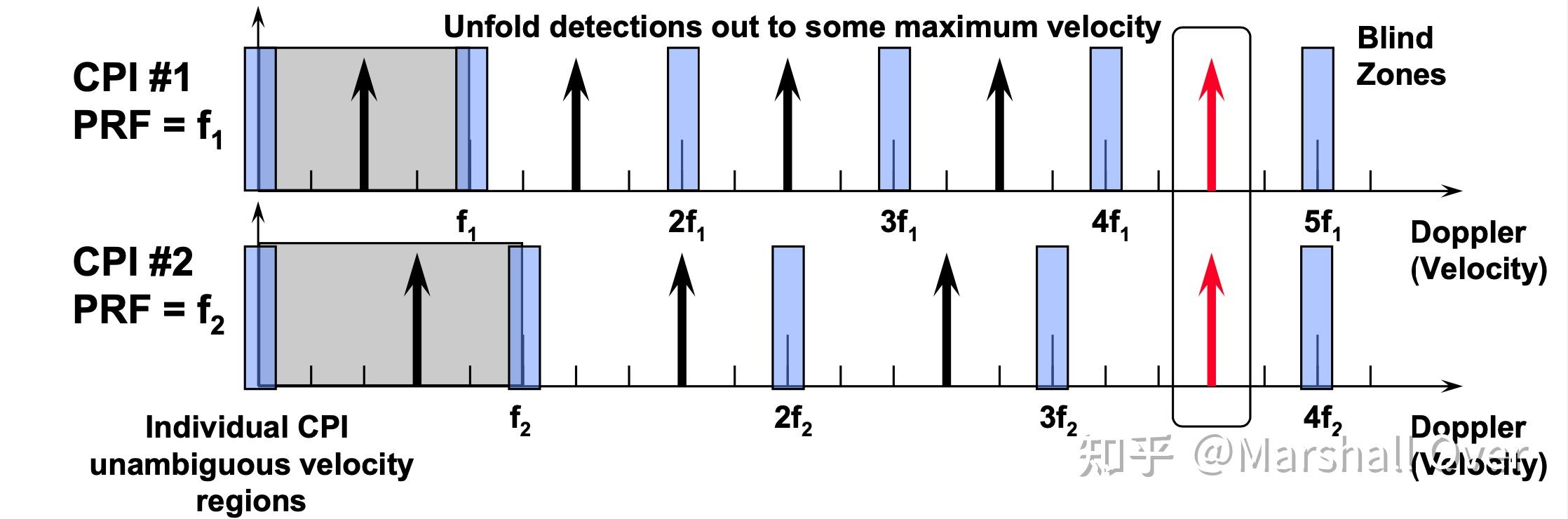
<img src="https://pic2.zhimg.com/v2-8199b39f45d4ee50de77e9b99330abcd_b.jpg" data-caption="" data-size="normal" data-rawwidth="2142" data-rawheight="1234" class="origin_image zh-lightbox-thumb" width="2142" data-original="https://pic2.zhimg.com/v2-8199b39f45d4ee50de77e9b99330abcd_r.jpg"/> 解速度模糊(Velocity Ambiguity Resolution): 将停留时间拆分为不同PRF下的多个CPI,扫描到扫描,甚至脉冲到脉冲的变化也是可能的;移动盲速度以确保检测到所有非零速度目标;真正的目标速度是CPI之间出现最佳相关性的地方;选择PRF,使最小公倍数出现在所需的最大无模糊速度之上。
<img src="https://pic4.zhimg.com/v2-ebba04d69a586c8b95892470e17b3e0b_b.jpg" data-caption="" data-size="normal" data-rawwidth="2236" data-rawheight="740" class="origin_image zh-lightbox-thumb" width="2236" data-original="https://pic4.zhimg.com/v2-ebba04d69a586c8b95892470e17b3e0b_r.jpg"/> Examples of Airborne Radar :
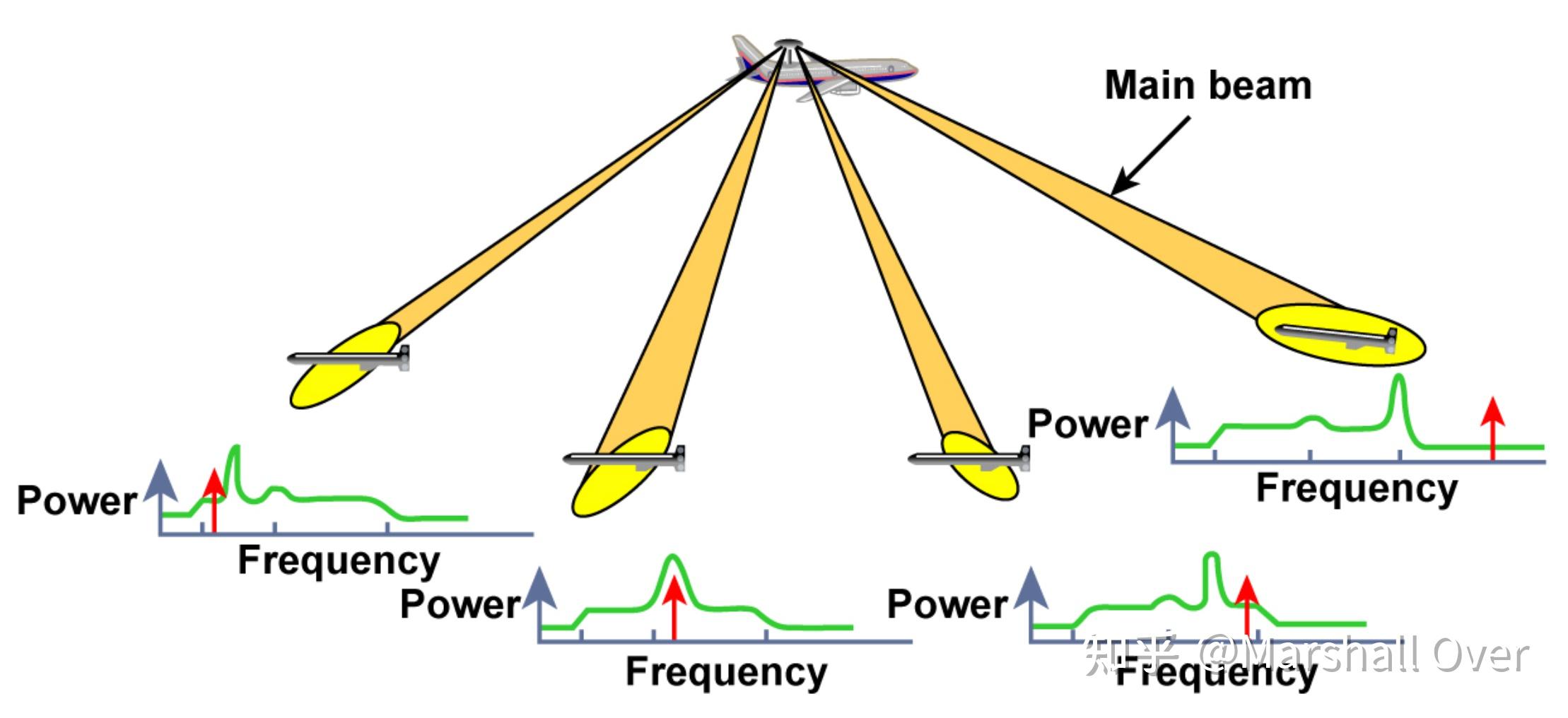
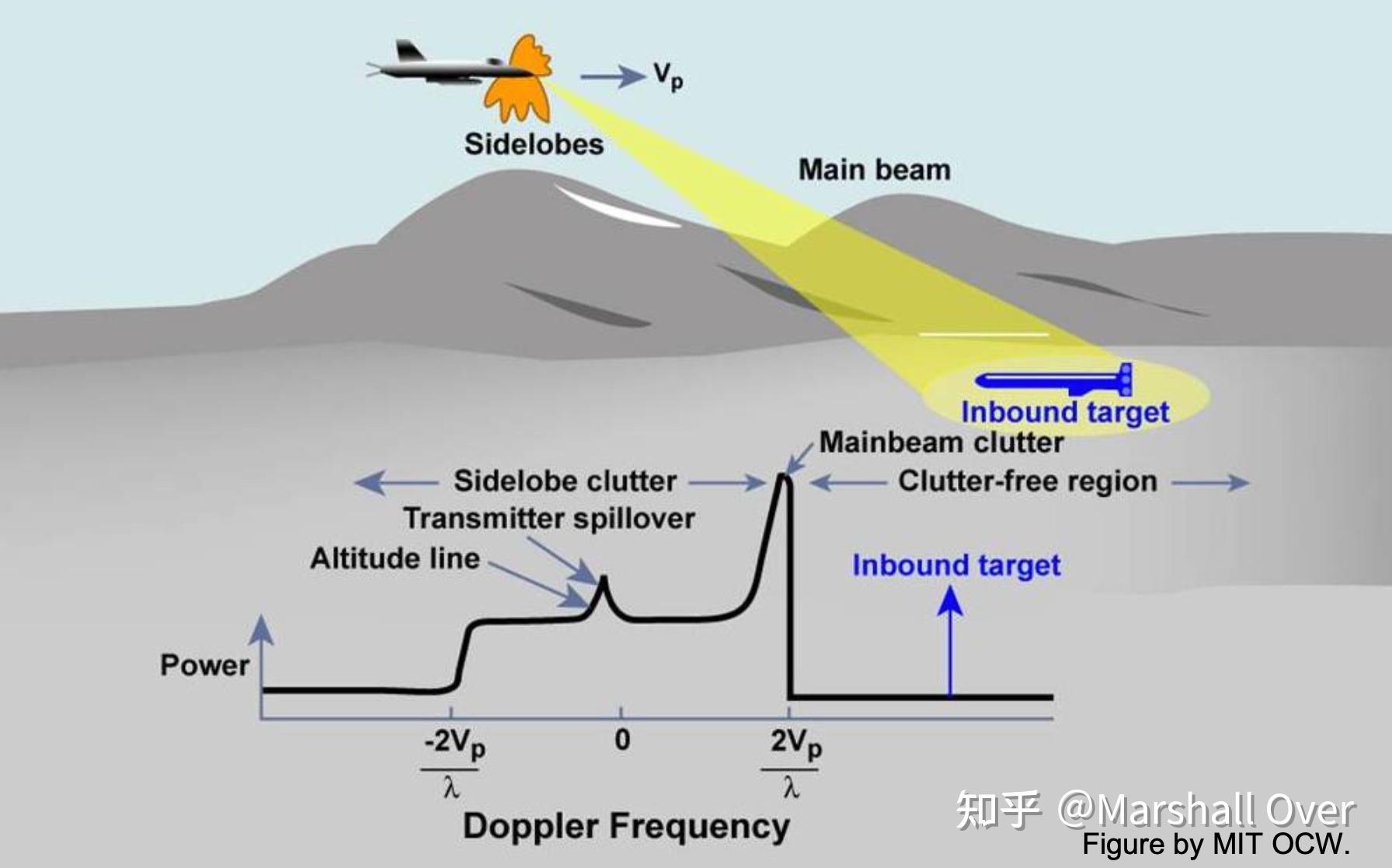
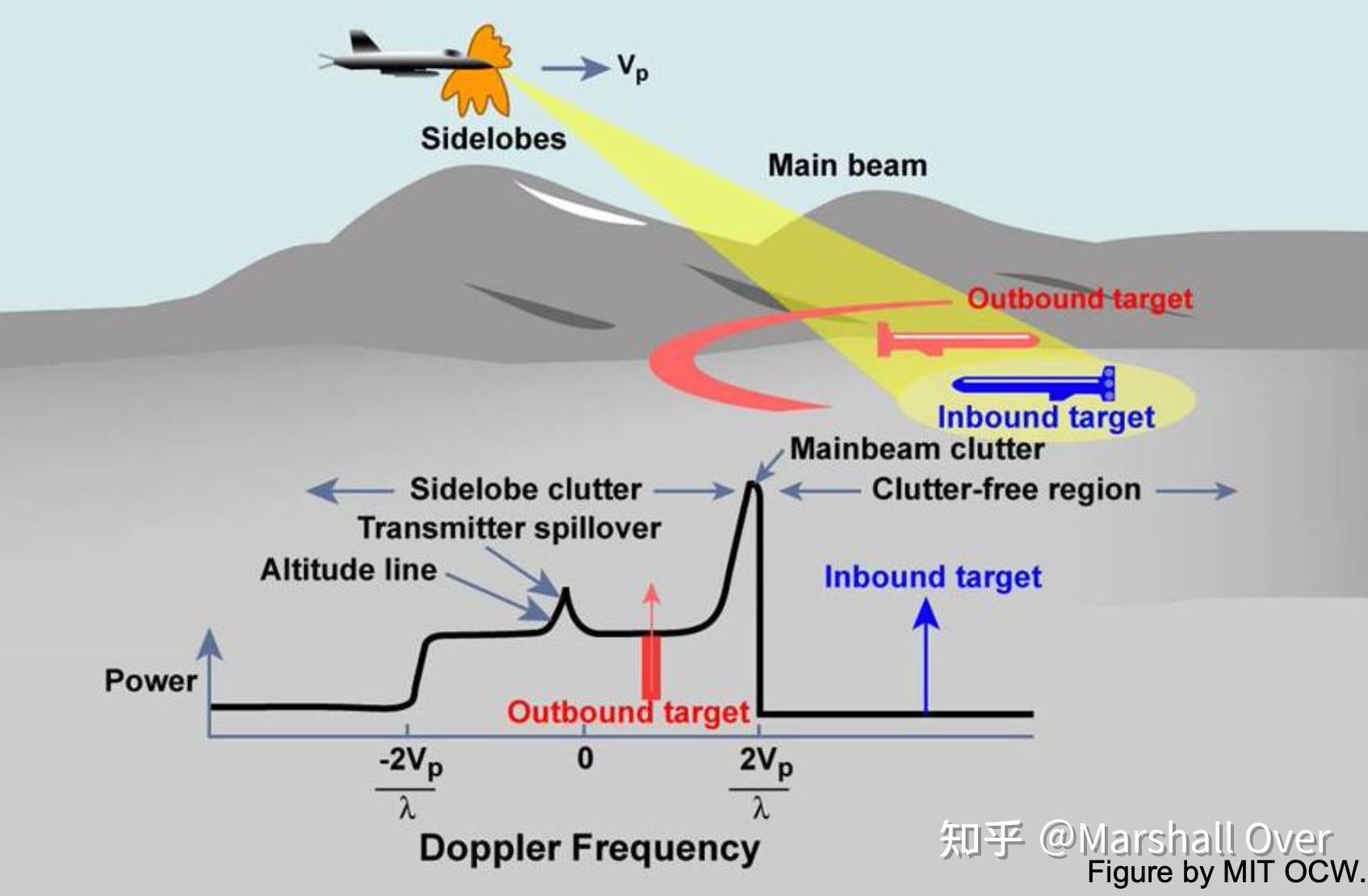
<img src="https://pic2.zhimg.com/v2-3b5b2be2f2b510a83b5a3c3dc5893251_b.jpg" data-caption="" data-size="normal" data-rawwidth="2174" data-rawheight="1236" class="origin_image zh-lightbox-thumb" width="2174" data-original="https://pic2.zhimg.com/v2-3b5b2be2f2b510a83b5a3c3dc5893251_r.jpg"/> 机载雷达杂波特性: 主瓣杂波的多普勒依赖于扫描方向;目标的多普勒依赖于扫描方向与目标方位。下图是一个无距离速度模糊的例子。
<img src="https://pic1.zhimg.com/v2-ba5bef77b951f1b50817cce38cb13578_b.jpg" data-caption="" data-size="normal" data-rawwidth="2218" data-rawheight="1016" class="origin_image zh-lightbox-thumb" width="2218" data-original="https://pic1.zhimg.com/v2-ba5bef77b951f1b50817cce38cb13578_r.jpg"/> 机载雷达杂波谱 :没有脉冲多普勒模糊的示例。
<img src="https://pic4.zhimg.com/v2-6bab024ff2f4c528d7f8c6efeae746c3_b.jpg" data-caption="" data-size="normal" data-rawwidth="1792" data-rawheight="1118" class="origin_image zh-lightbox-thumb" width="1792" data-original="https://pic4.zhimg.com/v2-6bab024ff2f4c528d7f8c6efeae746c3_r.jpg"/> <img src="https://pic2.zhimg.com/v2-f50ad659100f07a4249124b94070dc85_b.jpg" data-caption="" data-size="normal" data-rawwidth="1694" data-rawheight="1110" class="origin_image zh-lightbox-thumb" width="1694" data-original="https://pic2.zhimg.com/v2-f50ad659100f07a4249124b94070dc85_r.jpg"/> 位移相位中心天线(Displaced Phase Center Antenna, DPCA) :如果飞机运动通过天线波束相位中心的运动得到精确补偿,那么就不会因飞机运动而产生杂波扩散,并且可以使用双脉冲消除器来消除杂波。
<img src="https://pic3.zhimg.com/v2-5a067ef8ff7cde5c55ecaa1af6be982a_b.jpg" data-caption="" data-size="normal" data-rawwidth="1512" data-rawheight="714" class="origin_image zh-lightbox-thumb" width="1512" data-original="https://pic3.zhimg.com/v2-5a067ef8ff7cde5c55ecaa1af6be982a_r.jpg"/> 4 总结讨论 <img src="https://pic3.zhimg.com/v2-2b741d05be43f706bd3eba353a293e46_b.jpg" data-caption="" data-size="normal" data-rawwidth="2020" data-rawheight="1236" class="origin_image zh-lightbox-thumb" width="2020" data-original="https://pic3.zhimg.com/v2-2b741d05be43f706bd3eba353a293e46_r.jpg"/> 5 参考文献 [1] 百度翻译
[2] MIT 公开课:Introduction to Radar Systems。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号