0 写在前面 所有的过分在乎他人的看法,都是因为我们不够了解自己,不够爱惜自己。—叔本华
1 杂波介绍 雷达回波包括: 感兴趣目标的后向散射、接收器噪声、大气噪声、其他雷达干扰、干扰机干扰。来自不需要的物体的后向散射:地、海、雨、箔条、鸟、地面交通。
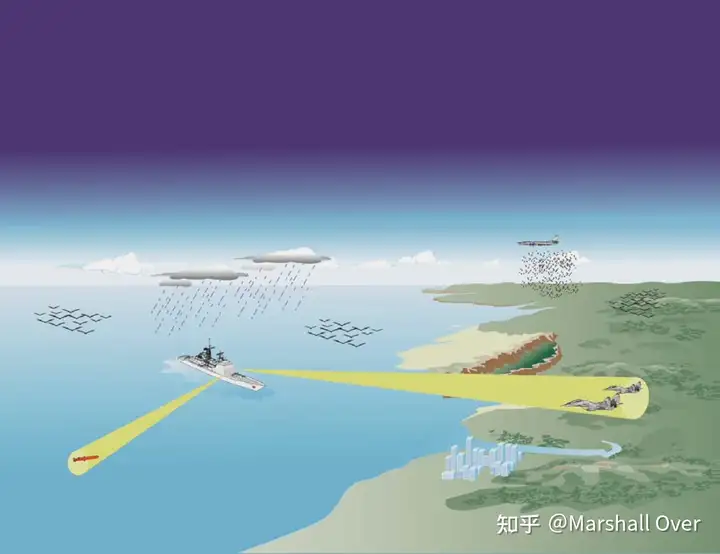
典型海军防空场景 :
<img src="https://pic1.zhimg.com/v2-a02414a99cd60a59449af34c64caba4c_b.jpg" data-caption="" data-size="normal" data-rawwidth="1360" data-rawheight="1046" class="origin_image zh-lightbox-thumb" width="1360" data-original="https://pic1.zhimg.com/v2-a02414a99cd60a59449af34c64caba4c_r.jpg"/> 2 地杂波 地杂波属性: 地杂波反向散射平均值:相对于飞机而言尺寸非常大。在统计上有所不同:频率、空间分辨率、几何形状、地形类型。地杂波回波的多普勒特性:固有多普勒扩散小。机械扫描天线增加了杂波的扩散。雷达平台的相对运动会影响地面杂波:机载、舰载。
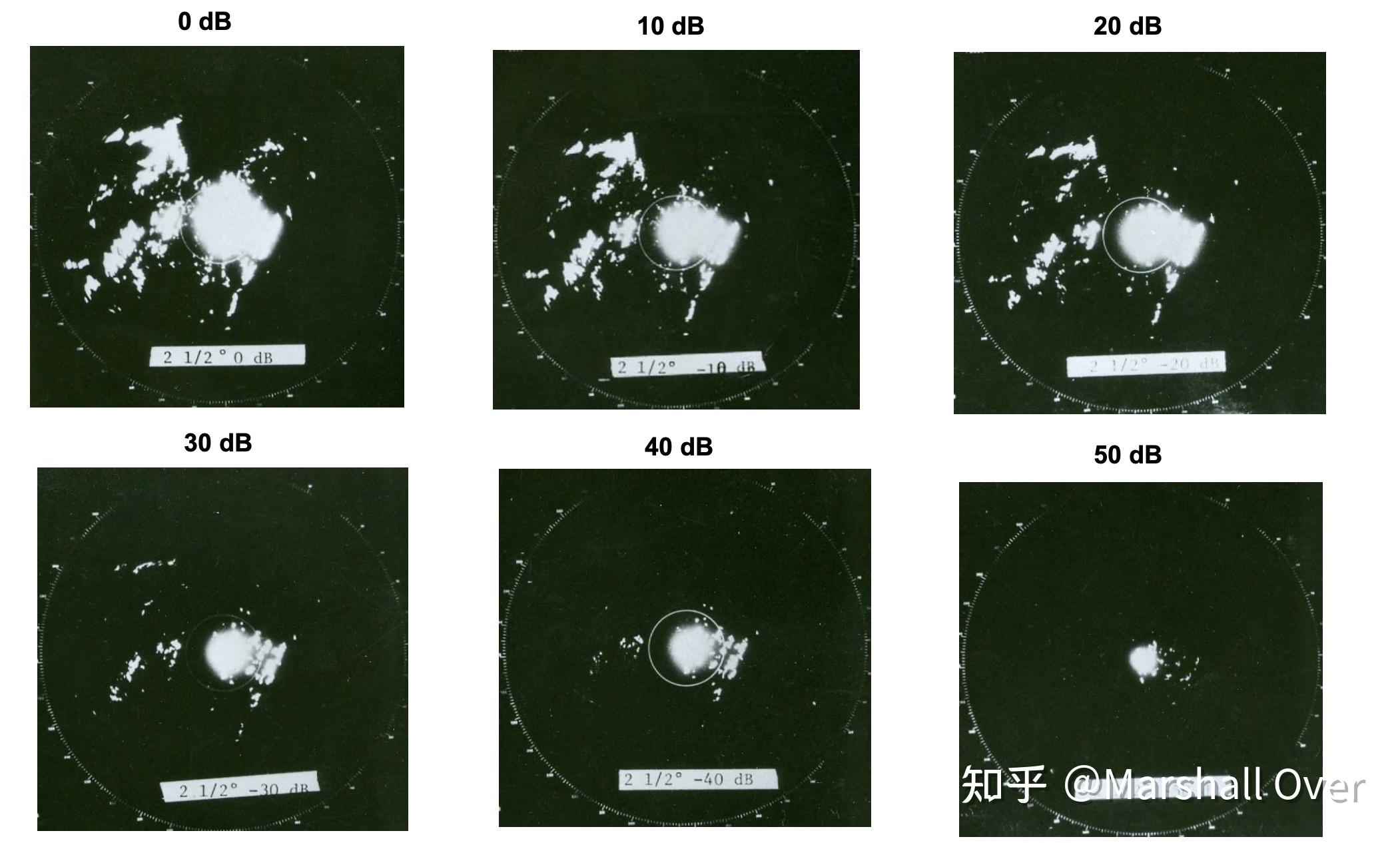
地面雷达PPI照片 :Mountainous Region of Lakehead, Ontario, Canada PPI Set for 30 nmi.
<img src="https://pic1.zhimg.com/v2-ed80b0cb9029bc862d4d39612d1ac3e0_b.jpg" data-caption="" data-size="normal" data-rawwidth="1932" data-rawheight="988" class="origin_image zh-lightbox-thumb" width="1932" data-original="https://pic1.zhimg.com/v2-ed80b0cb9029bc862d4d39612d1ac3e0_r.jpg"/> 不同衰减水平:
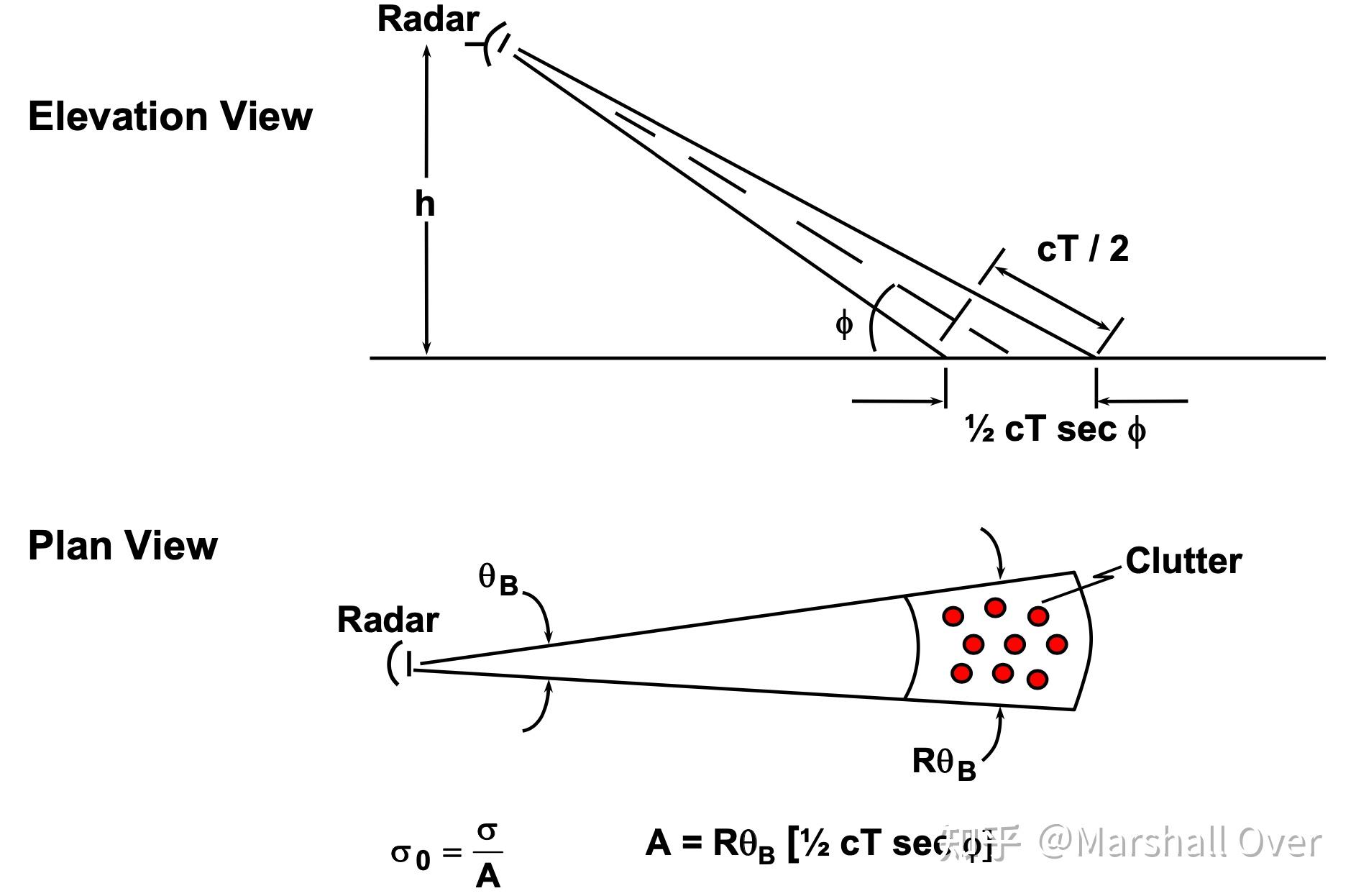
<img src="https://pic3.zhimg.com/v2-622c97b192d5715b0ee0351d6ee9cd3e_b.jpg" data-caption="" data-size="normal" data-rawwidth="2102" data-rawheight="1266" class="origin_image zh-lightbox-thumb" width="2102" data-original="https://pic3.zhimg.com/v2-622c97b192d5715b0ee0351d6ee9cd3e_r.jpg"/> 雷达杂波几何模型 :
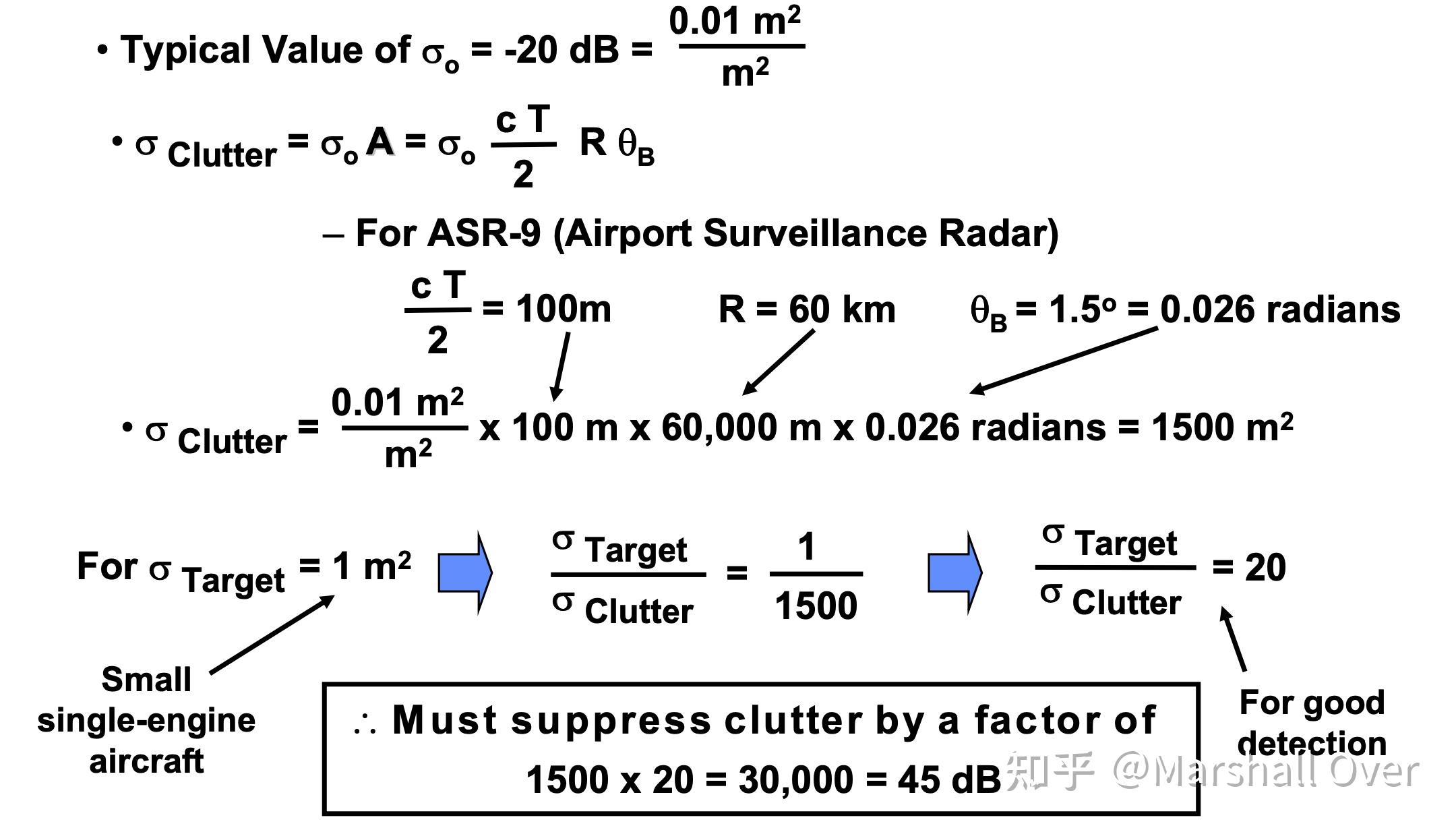
<img src="https://pic4.zhimg.com/v2-ac063783ae45cc7bd13efddb175f4ae3_b.jpg" data-caption="" data-size="normal" data-rawwidth="1886" data-rawheight="1246" class="origin_image zh-lightbox-thumb" width="1886" data-original="https://pic4.zhimg.com/v2-ac063783ae45cc7bd13efddb175f4ae3_r.jpg"/> 杂波计算 :杂波抑制应在45dB。
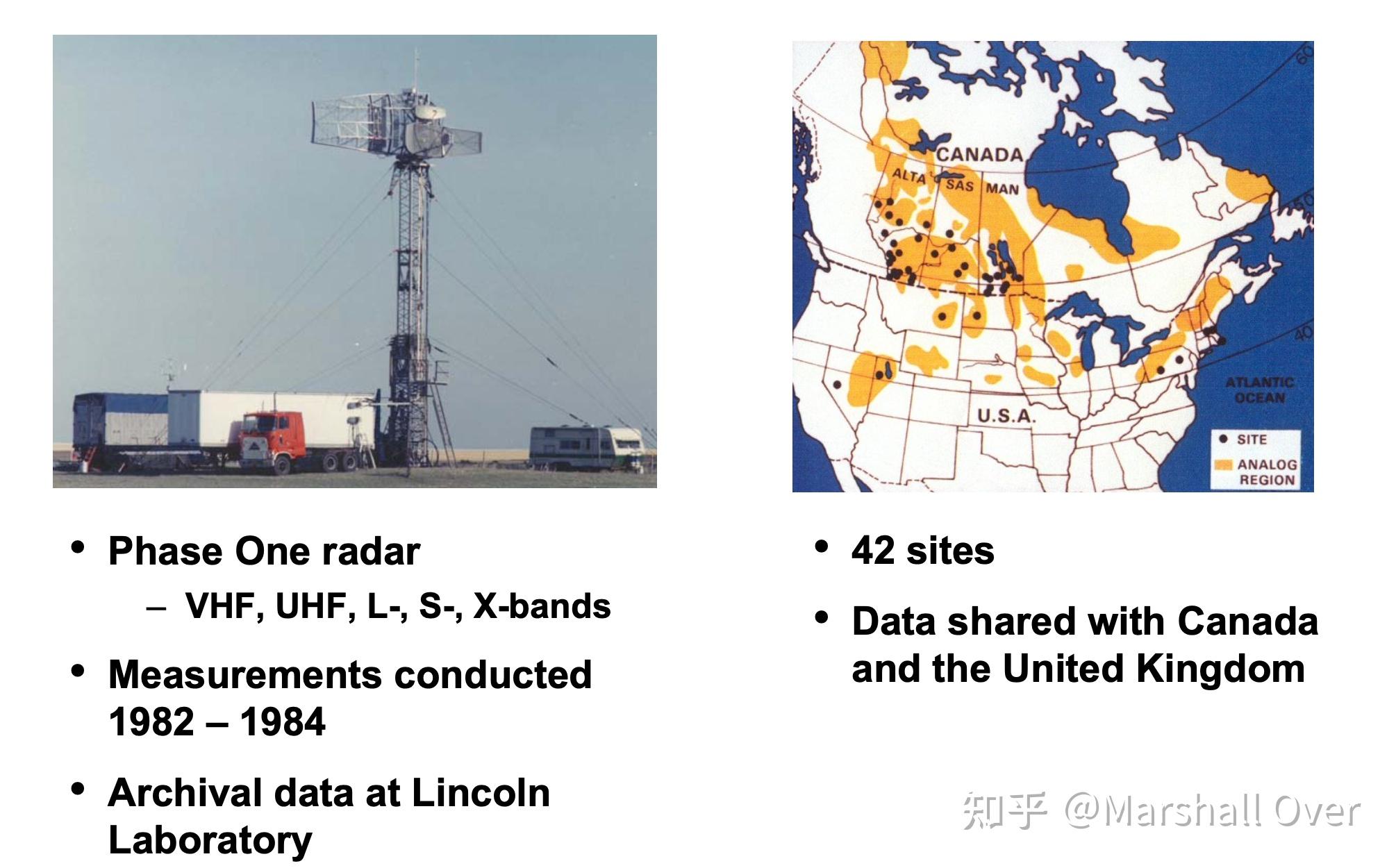
<img src="https://pic2.zhimg.com/v2-c28b90d25b9253875c1653bf2adff251_b.jpg" data-caption="" data-size="normal" data-rawwidth="2160" data-rawheight="1228" class="origin_image zh-lightbox-thumb" width="2160" data-original="https://pic2.zhimg.com/v2-c28b90d25b9253875c1653bf2adff251_r.jpg"/> Joint U.S./Canada Measurement Program :
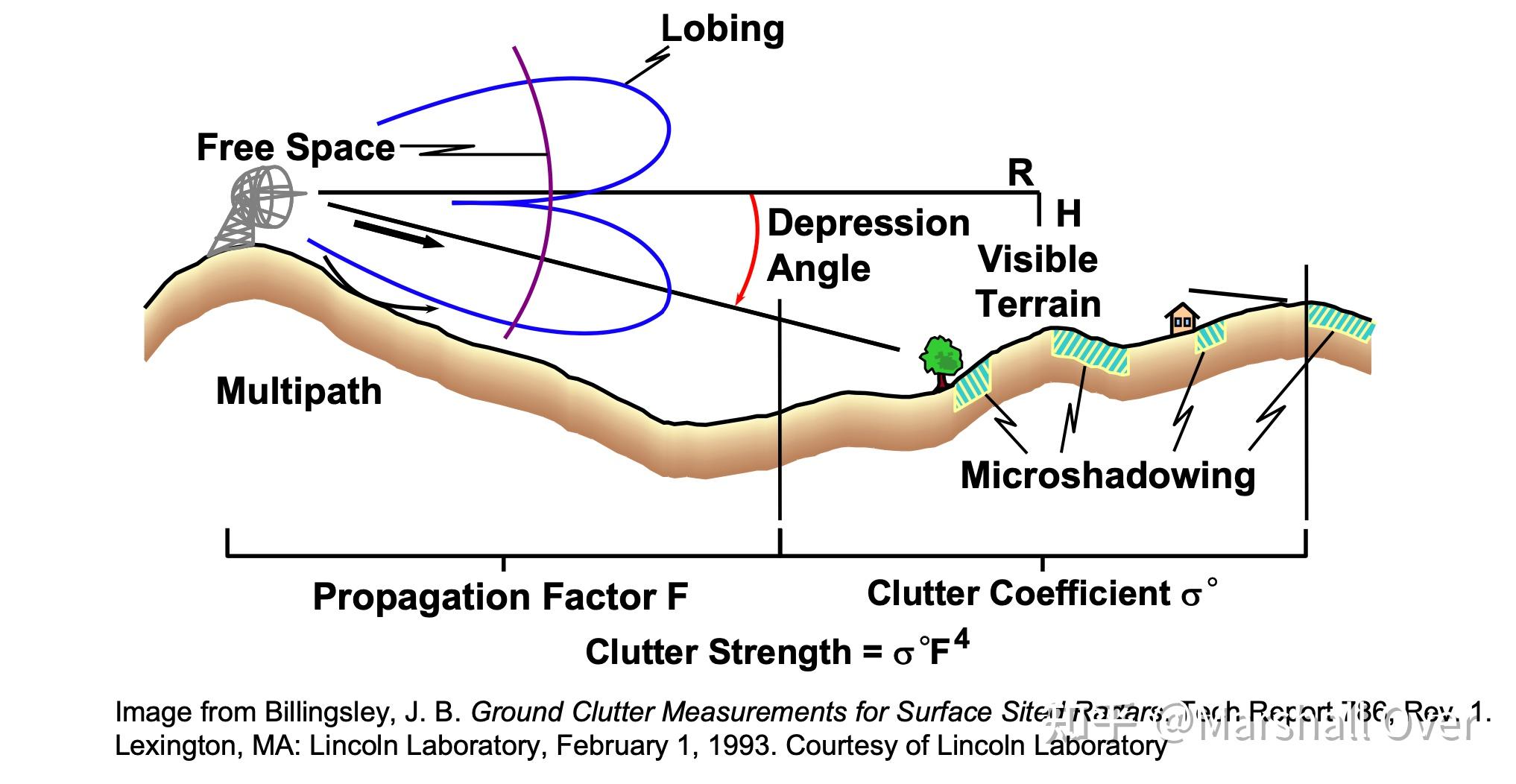
<img src="https://pic4.zhimg.com/v2-ed34e52ee53c7dcc27820a120807a783_b.jpg" data-caption="" data-size="normal" data-rawwidth="2010" data-rawheight="1250" class="origin_image zh-lightbox-thumb" width="2010" data-original="https://pic4.zhimg.com/v2-ed34e52ee53c7dcc27820a120807a783_r.jpg"/> 杂波物理特性: 雷达参数:频率和空间分辨率。几何 :俯仰角(距离和高度)。地形类型 :地形地貌。
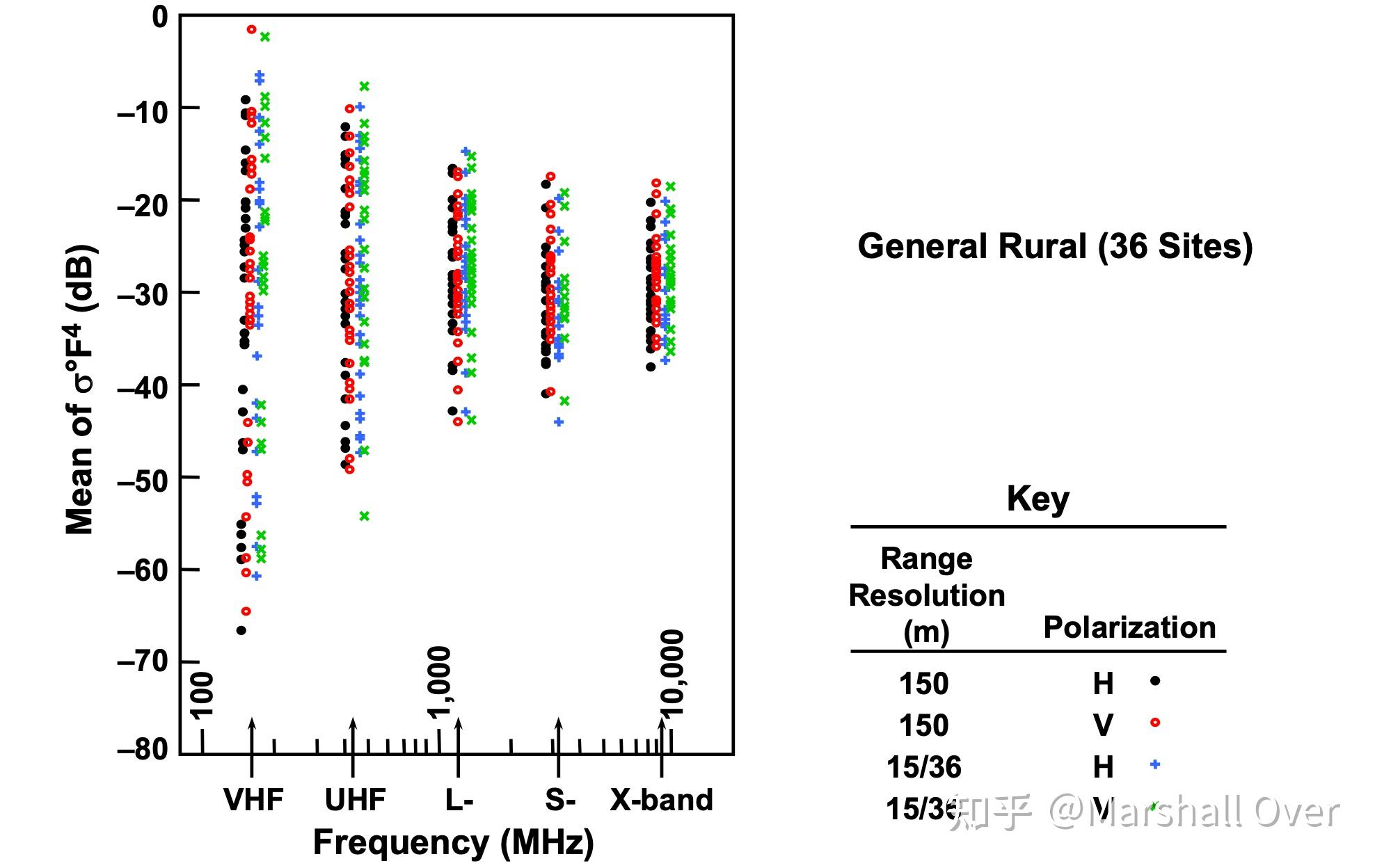
<img src="https://pic4.zhimg.com/v2-6ad340fe9eb7d007de75e7af7bfaecfb_b.jpg" data-caption="" data-size="normal" data-rawwidth="2034" data-rawheight="1052" class="origin_image zh-lightbox-thumb" width="2034" data-original="https://pic4.zhimg.com/v2-6ad340fe9eb7d007de75e7af7bfaecfb_r.jpg"/> 平均杂波强度与频率关系 :
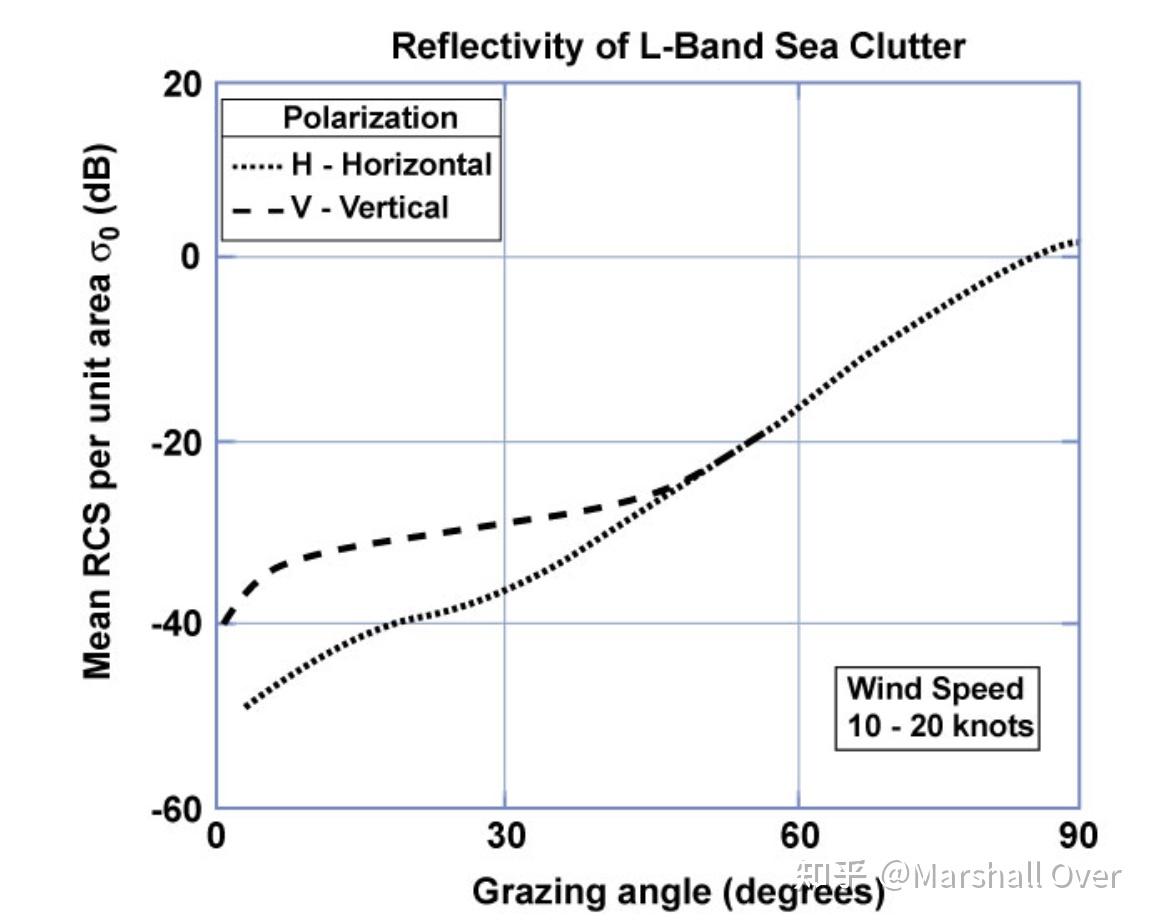
<img src="https://pic1.zhimg.com/v2-1e113fd6a1e50103378c0e8ecd192724_b.jpg" data-caption="" data-size="normal" data-rawwidth="1976" data-rawheight="1248" class="origin_image zh-lightbox-thumb" width="1976" data-original="https://pic1.zhimg.com/v2-1e113fd6a1e50103378c0e8ecd192724_r.jpg"/> 3 海杂波 海杂波的RCS取决于很多因素 :风和天气(海情)、频率、极化、距离分辨单元、横向距离分辨单元、掠射角和其他很多未知变量。平均海杂波后向散射比地杂波小100多倍。
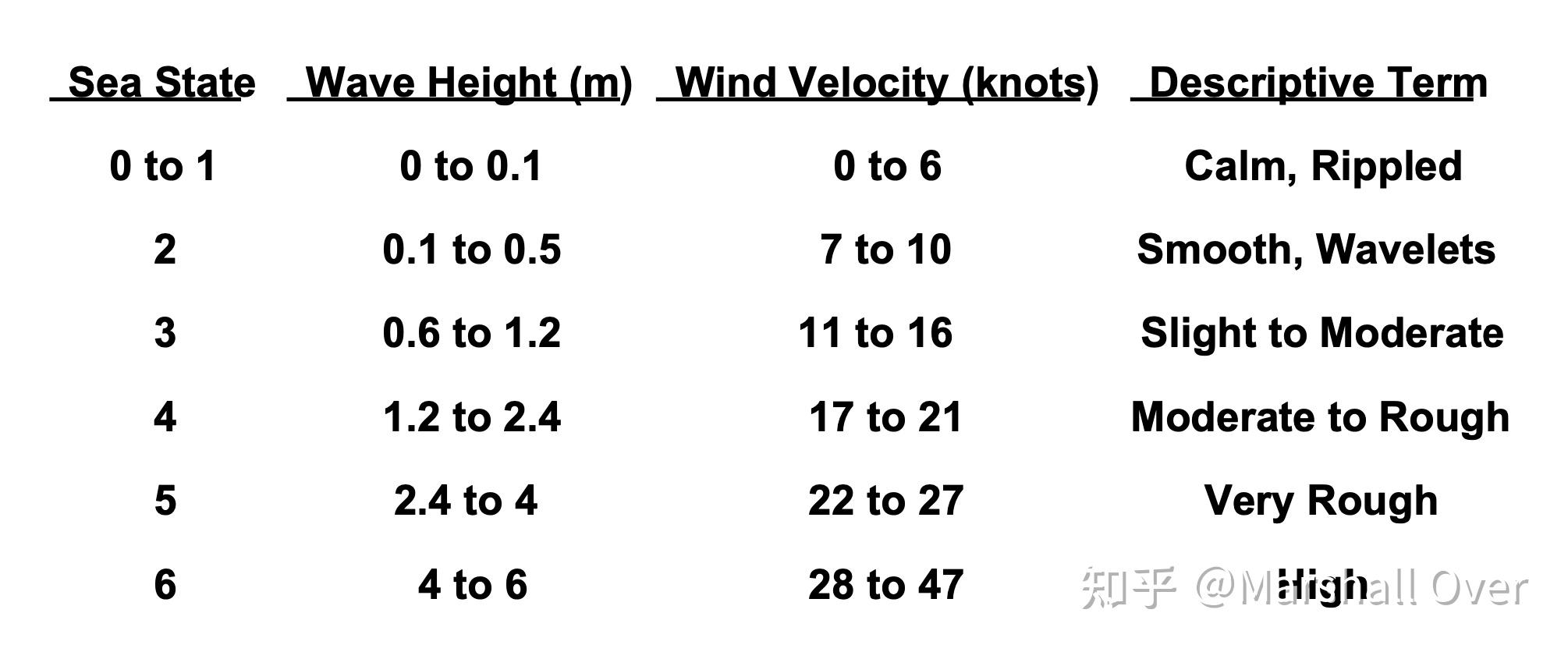
<img src="https://pic2.zhimg.com/v2-fdc16f8b11fb03e14632ae6f6233fe61_b.jpg" data-caption="" data-size="normal" data-rawwidth="1150" data-rawheight="922" class="origin_image zh-lightbox-thumb" width="1150" data-original="https://pic2.zhimg.com/v2-fdc16f8b11fb03e14632ae6f6233fe61_r.jpg"/> 世界气象组织海洋状况 :
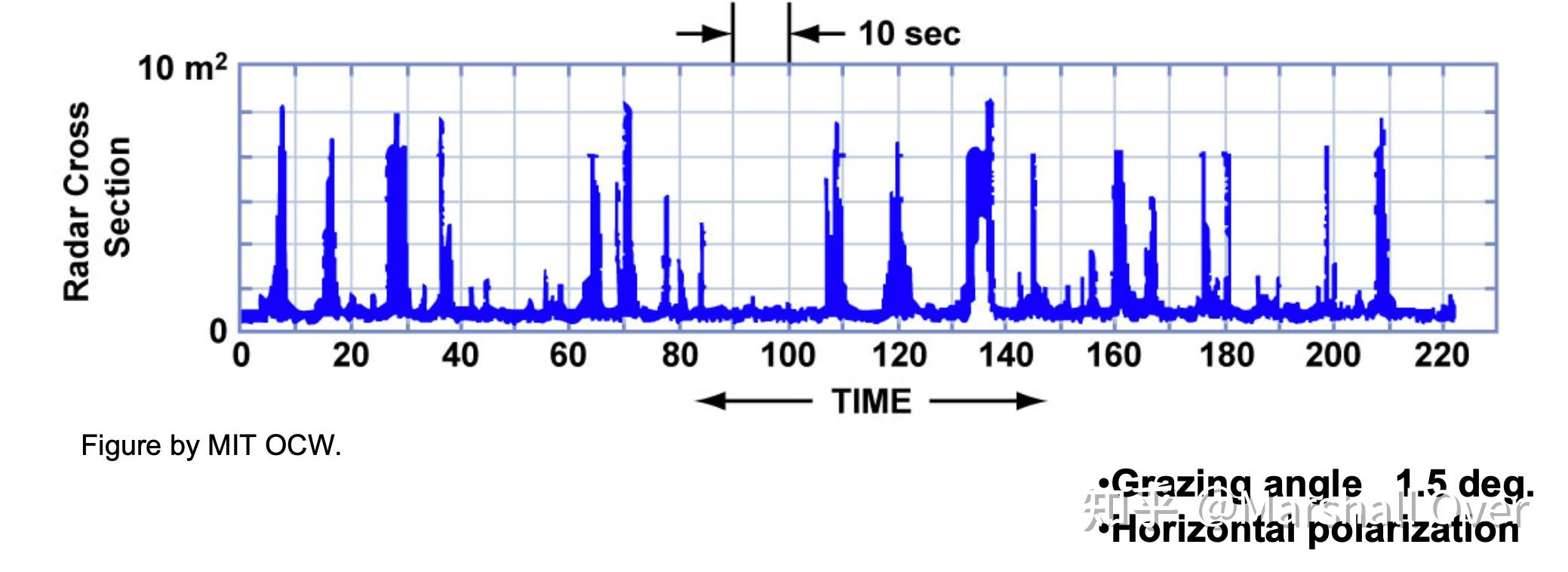
<img src="https://pic2.zhimg.com/v2-4a5bbb2fcb33c0e457c836e4629a19dd_b.jpg" data-caption="" data-size="normal" data-rawwidth="2010" data-rawheight="836" class="origin_image zh-lightbox-thumb" width="2010" data-original="https://pic2.zhimg.com/v2-4a5bbb2fcb33c0e457c836e4629a19dd_r.jpg"/> 海尖峰: 在低掠角时,被称为“海尖峰”的尖锐海杂波峰值开始出现。这些海尖峰会导致过度的错误检测。
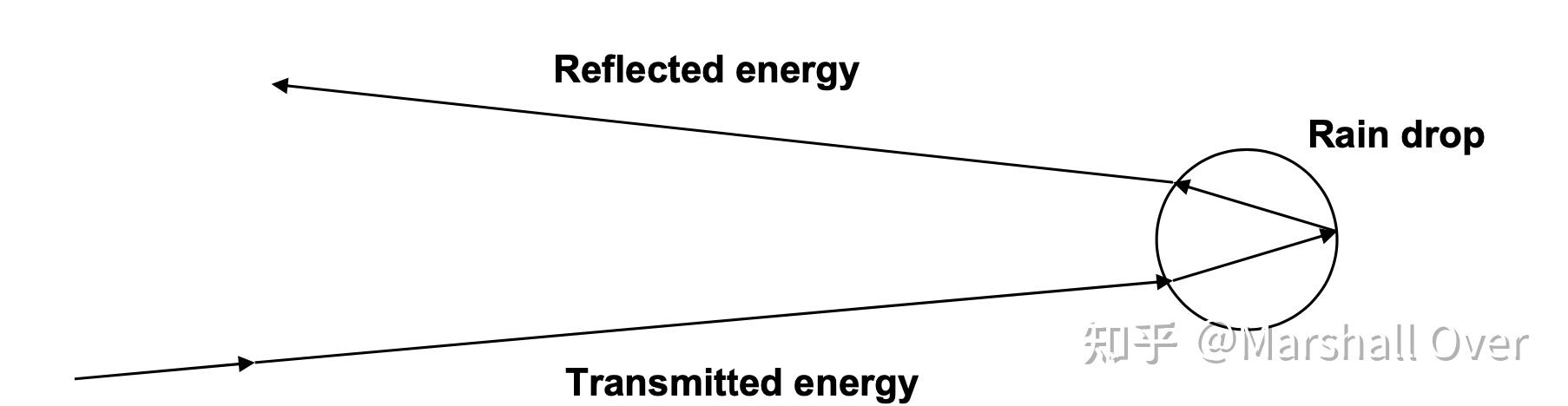
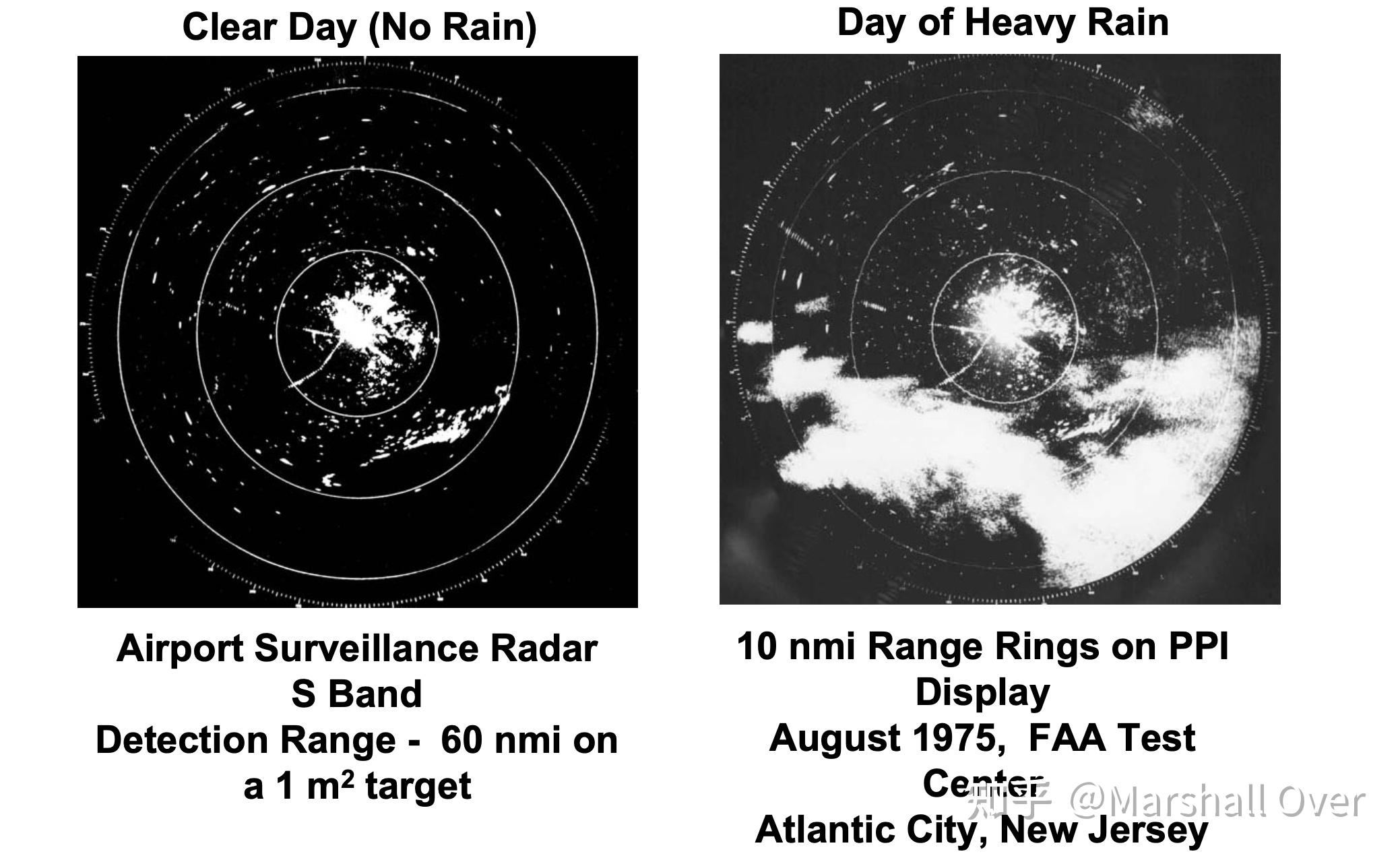
<img src="https://pic1.zhimg.com/v2-f1c3bd9c8a8bff1dca5b8b6f3158f308_b.jpg" data-caption="" data-size="normal" data-rawwidth="2078" data-rawheight="758" class="origin_image zh-lightbox-thumb" width="2078" data-original="https://pic1.zhimg.com/v2-f1c3bd9c8a8bff1dca5b8b6f3158f308_r.jpg"/> 4 雨 雨水既衰减又反射雷达信号 ;随着波长的增加(频率的降低),降雨引起的问题显著减少;L波段的问题远小于X波段的问题。雨水是漫反射杂波:随风水平移动;具有平均多普勒速度和扩散。
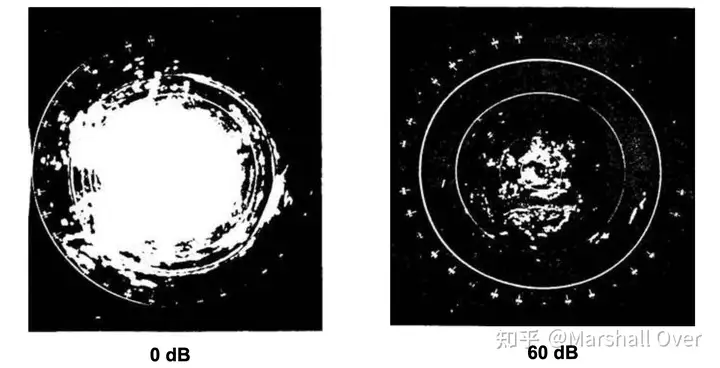
<img src="https://pic1.zhimg.com/v2-29ee1b2ac91cee4228eb9eda31247080_b.jpg" data-caption="" data-size="normal" data-rawwidth="1806" data-rawheight="468" class="origin_image zh-lightbox-thumb" width="1806" data-original="https://pic1.zhimg.com/v2-29ee1b2ac91cee4228eb9eda31247080_r.jpg"/> PPI Display Radar Normal Video :无雨与大雨对比。
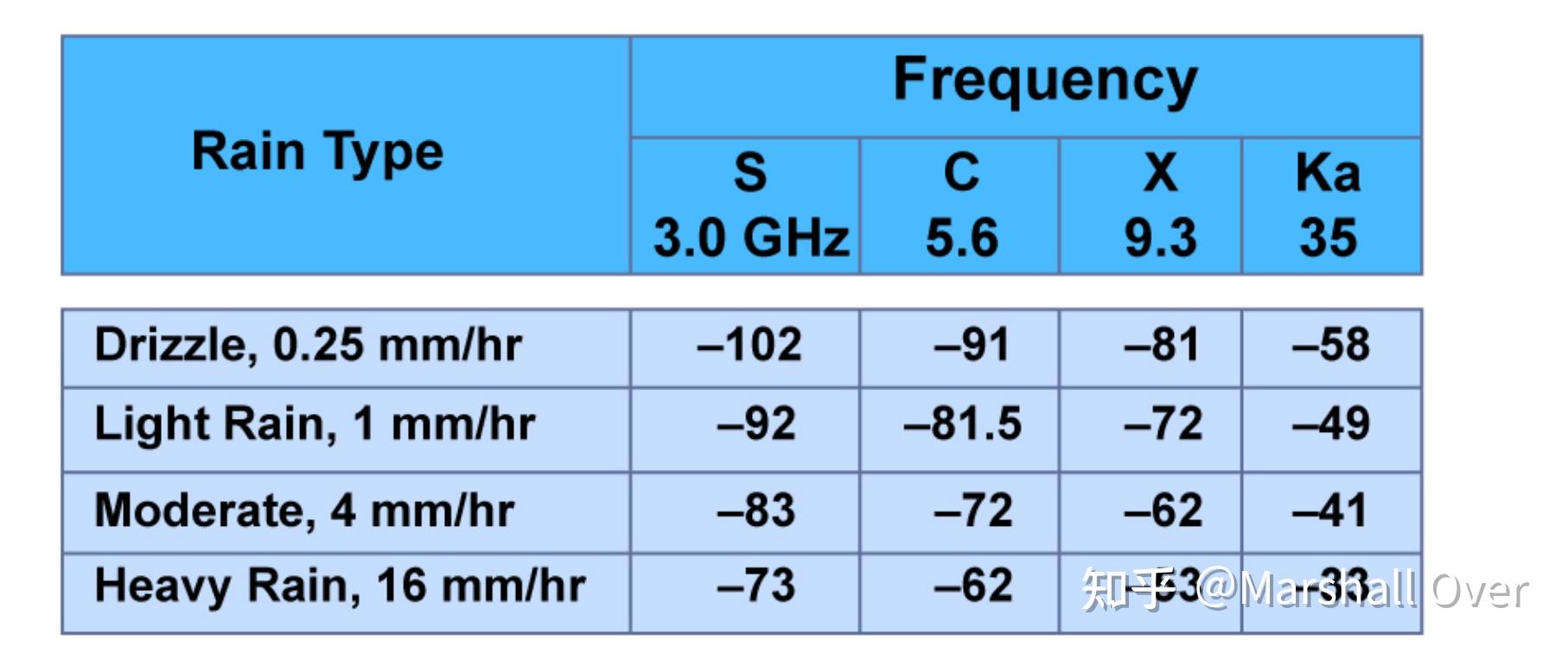
<img src="https://pic2.zhimg.com/v2-f4fdb540ac21b7b22a019e488e7218b1_b.jpg" data-caption="" data-size="normal" data-rawwidth="2078" data-rawheight="1270" class="origin_image zh-lightbox-thumb" width="2078" data-original="https://pic2.zhimg.com/v2-f4fdb540ac21b7b22a019e488e7218b1_r.jpg"/> 均匀降雨的反射率 :降雨反射率随着f4(或1/λ4)的增加而增加,雨杂波在S波段是一个问题,在X波段或更高频率是一个重要问题,单位为dBm^2/m^3
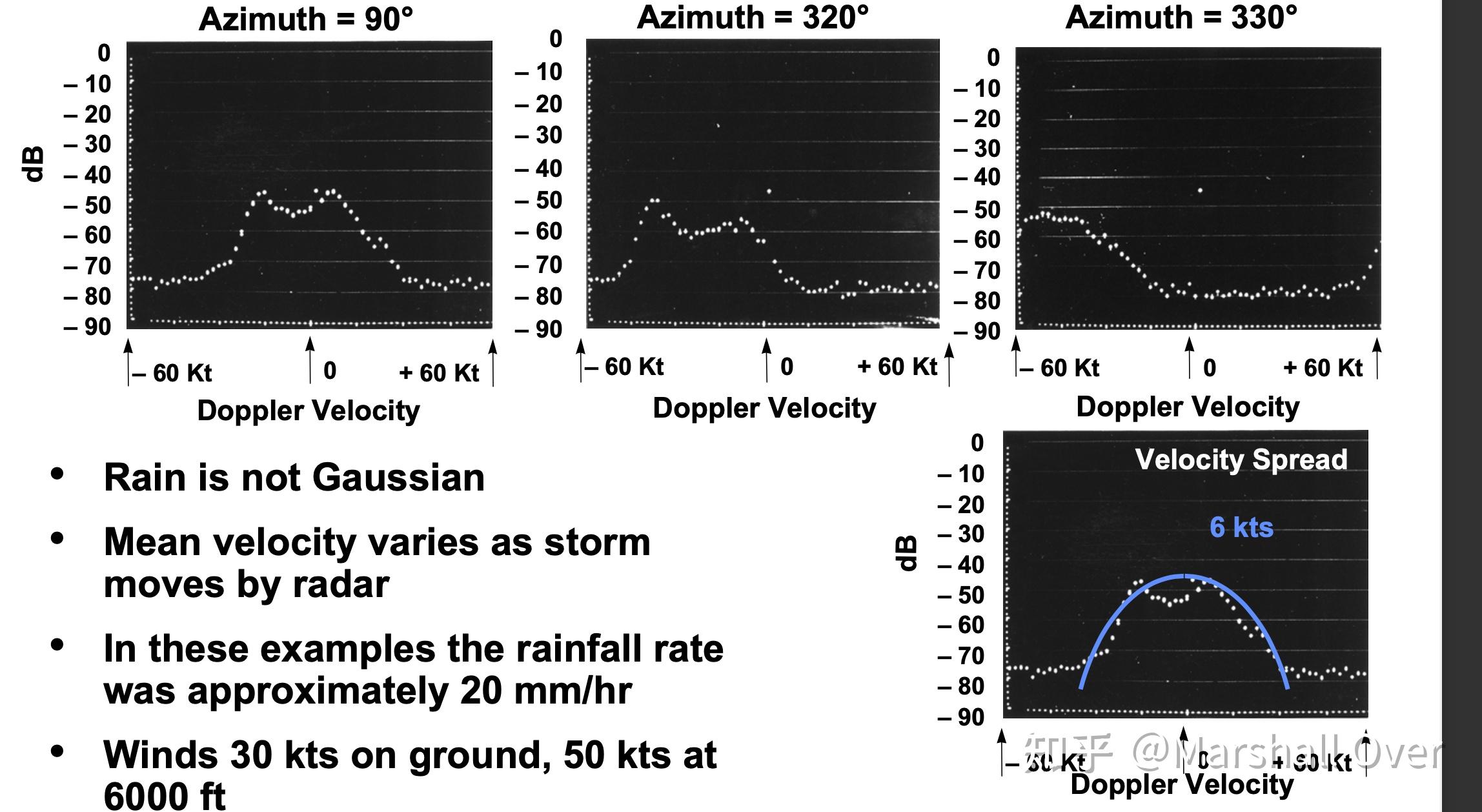
<img src="https://pic3.zhimg.com/v2-7bf693ee7da427be11cd772892467546_b.jpg" data-caption="" data-size="normal" data-rawwidth="1814" data-rawheight="756" class="origin_image zh-lightbox-thumb" width="1814" data-original="https://pic3.zhimg.com/v2-7bf693ee7da427be11cd772892467546_r.jpg"/> 实测雨水的多普勒谱: 非高斯分布,平均速度随雷达移动而变化,降雨量约为20毫米/小时,地面风力为30kts,6000ft 为50kts。
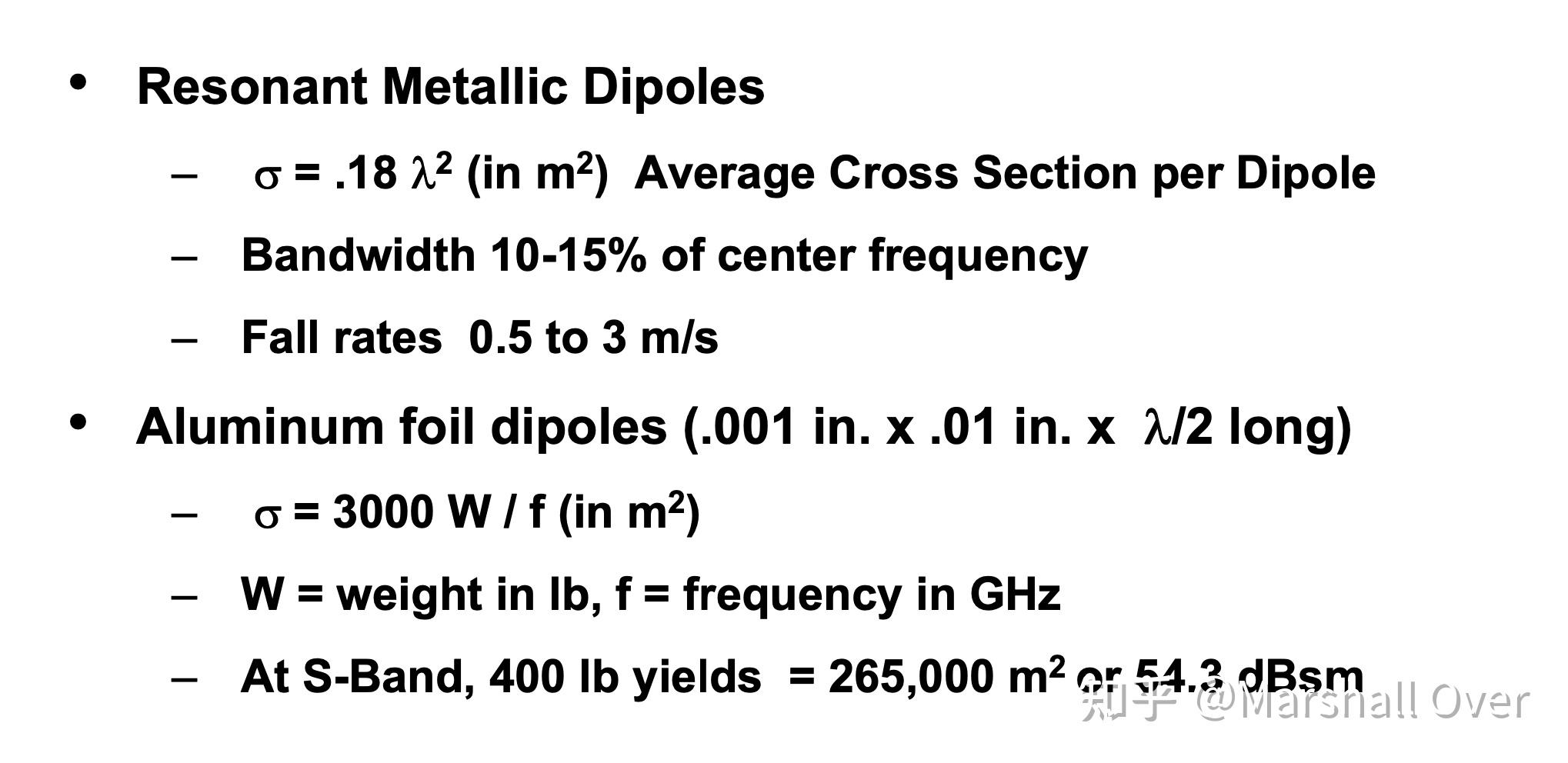
<img src="https://pic1.zhimg.com/v2-0e0fd5782ba211d53df879d66e981c7c_b.jpg" data-caption="" data-size="normal" data-rawwidth="2296" data-rawheight="1258" class="origin_image zh-lightbox-thumb" width="2296" data-original="https://pic1.zhimg.com/v2-0e0fd5782ba211d53df879d66e981c7c_r.jpg"/> 5 箔条 箔条 :大量偶极子(金属或金属涂层);每磅反射率高;最佳长度为雷达波长的1/2;随风而动。
箔条的使用 :掩蔽:大型箔条云可以遮挡云层内或附近的飞机或导弹。欺骗:可以模仿导弹/飞机,造成错误
检测;箔条可以使雷达跟踪器偏离目标。
箔条反射率与密度 :
<img src="https://pic4.zhimg.com/v2-f777828a4c3bb76c5ddc3480a35aa1bb_b.jpg" data-caption="" data-size="normal" data-rawwidth="2038" data-rawheight="992" class="origin_image zh-lightbox-thumb" width="2038" data-original="https://pic4.zhimg.com/v2-f777828a4c3bb76c5ddc3480a35aa1bb_r.jpg"/> AN/ALE-38 Chaff-Dispensing System :
<img src="https://pic1.zhimg.com/v2-c1fa7725a62b94cf9051193b3989b29c_b.jpg" data-caption="" data-size="normal" data-rawwidth="2136" data-rawheight="1248" class="origin_image zh-lightbox-thumb" width="2136" data-original="https://pic1.zhimg.com/v2-c1fa7725a62b94cf9051193b3989b29c_r.jpg"/> 6 鸟与昆虫 鸟类繁殖区和迁徙路线 :在墨西哥湾沿岸的繁殖季节,有多达60000只的海鸟和涉禽群落。一万只鸟很常见。这些鸟很大;重量可达1公斤,翼展从0.75米到几米。
<img src="https://pic1.zhimg.com/v2-2232f9fd5e1c5dd3d1dfc3aa78730bdc_b.jpg" data-caption="" data-size="normal" data-rawwidth="2084" data-rawheight="1074" class="origin_image zh-lightbox-thumb" width="2084" data-original="https://pic1.zhimg.com/v2-2232f9fd5e1c5dd3d1dfc3aa78730bdc_r.jpg"/> 在密西西比河下游流域 ,已经确定了63个黑鸟栖息地,每个栖息地有100多万只。许多较小的栖息地也存在。这些鸟每天分散在30英里外觅食。
<img src="https://pic3.zhimg.com/v2-31134fb345200a81d8013d4b92ef3112_b.jpg" data-caption="" data-size="normal" data-rawwidth="1912" data-rawheight="1066" class="origin_image zh-lightbox-thumb" width="1912" data-original="https://pic3.zhimg.com/v2-31134fb345200a81d8013d4b92ef3112_r.jpg"/> 鸟的雷达特性 :尽管鸟类的雷达回波相对较小,但鸟类密度如此之大,以至于鸟类经常会用虚假目标使雷达过载。由于鸟类以相对较低的速度移动,如果测量它们的速度,可以优先将低速鸟类排除在外。
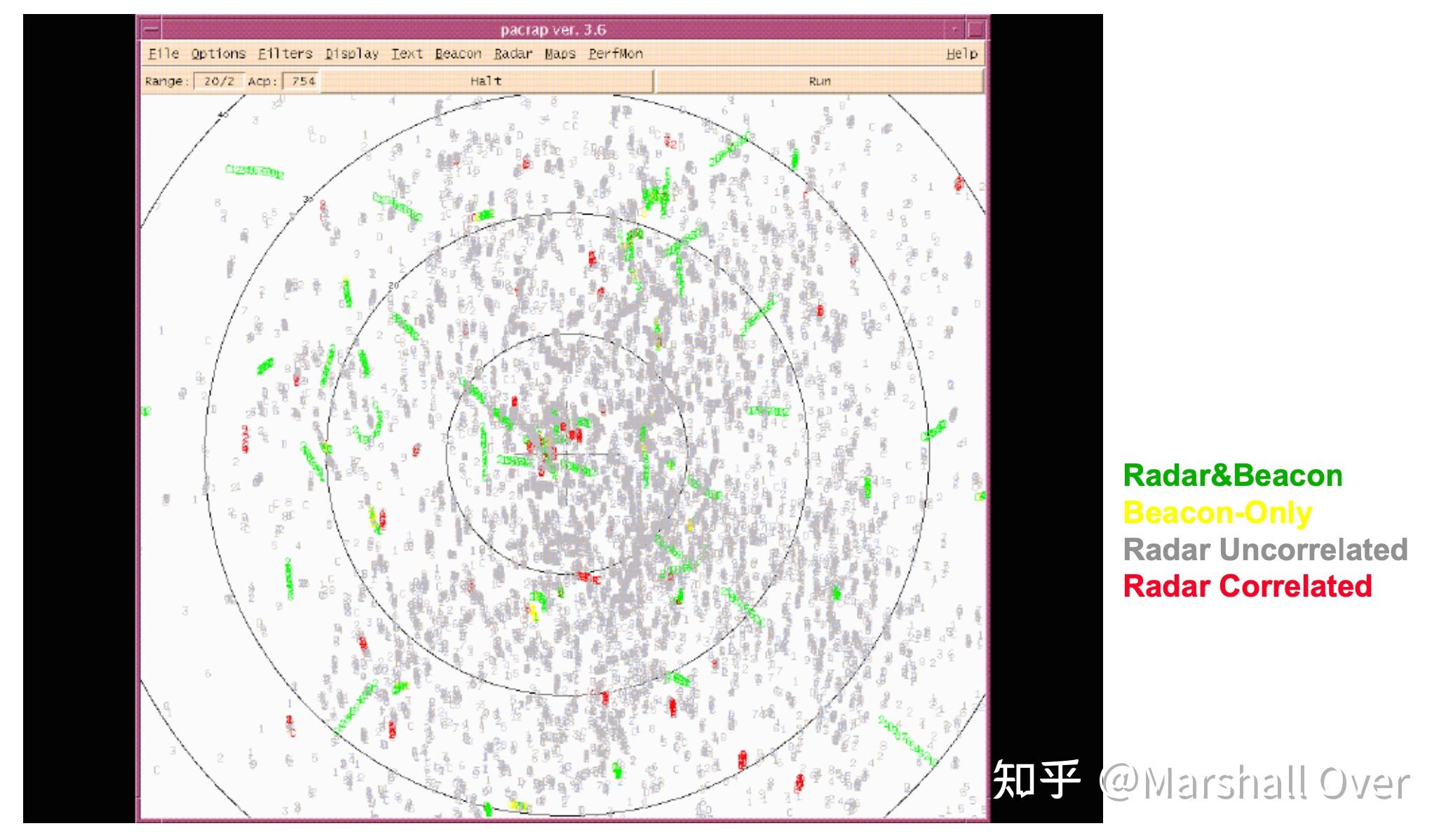
<img src="https://pic1.zhimg.com/v2-30747e41c11d7474c83eb91978dd0f9c_b.jpg" data-caption="" data-size="normal" data-rawwidth="2042" data-rawheight="566" class="origin_image zh-lightbox-thumb" width="2042" data-original="https://pic1.zhimg.com/v2-30747e41c11d7474c83eb91978dd0f9c_r.jpg"/> Bird Example from Dallas-Fort Worth :
<img src="https://pic2.zhimg.com/v2-3fc5272e9f349e9bd2a45765c8cda0ed_b.jpg" data-caption="" data-size="normal" data-rawwidth="2062" data-rawheight="1198" class="origin_image zh-lightbox-thumb" width="2062" data-original="https://pic2.zhimg.com/v2-3fc5272e9f349e9bd2a45765c8cda0ed_r.jpg"/> 鸟的特性 :鸟类实际上是移动点目标,速度通常小于60节,平均雷达横截面很小,但只是鸟的一小部分回波波动高达高水平(类似飞机),横截面在S波段和L波段共振。每平方英里有很多鸟,每平方英里10到1000只鸟,鸟类会在许多雷达中造成假目标问题,检测低横截面目标时的重大问题。
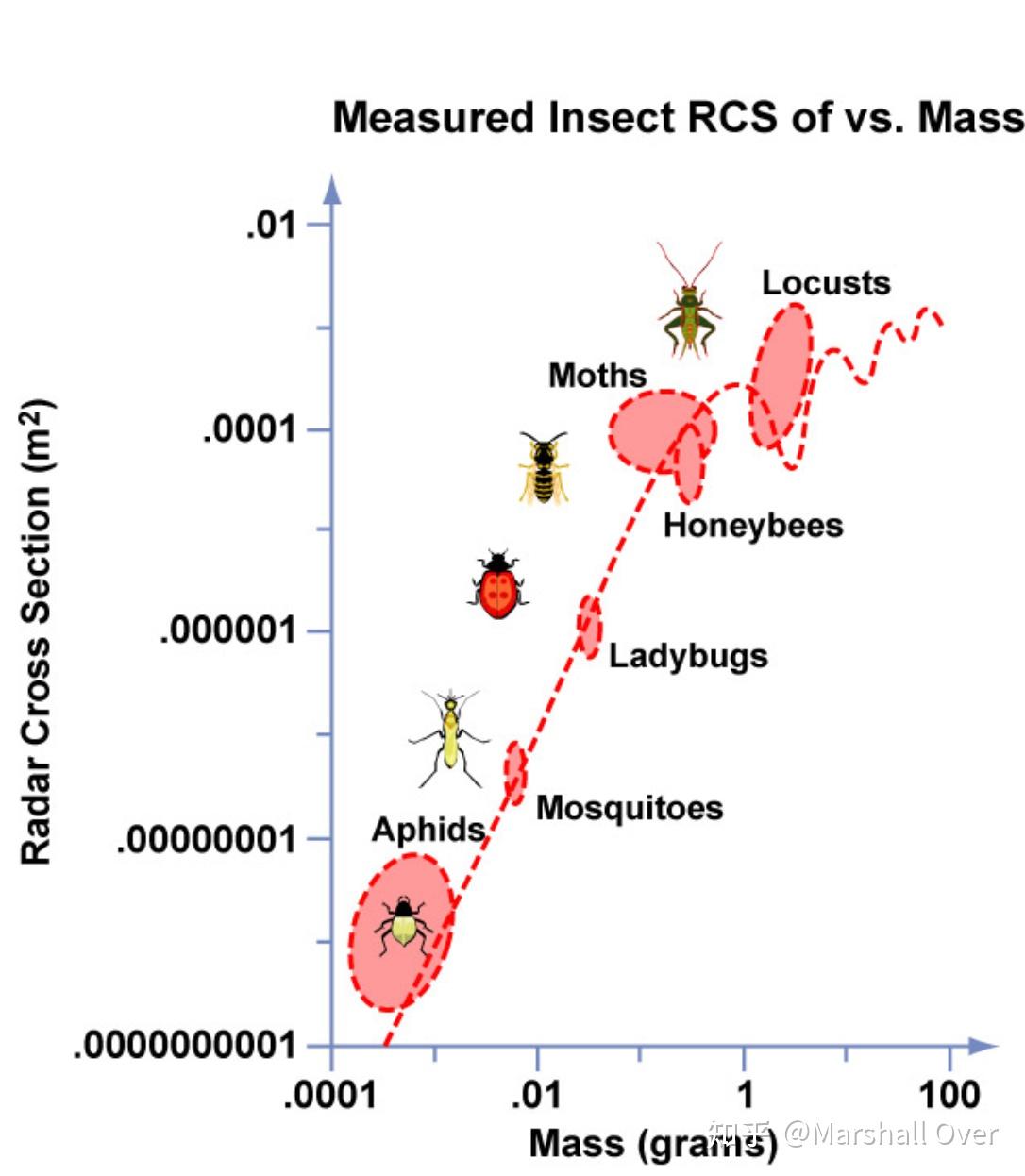
昆虫: 昆虫会扰乱显示器,阻止检测到想要的目标。昆虫的密度可能比鸟类的密度高出许多数量级。昆虫的飞行路径通常遵循风的飞行路径。横截面可以表示为相同质量的球形水滴,Insect echoes broad side are 10 to 1,000 times than when viewed end on 。
<img src="https://pic3.zhimg.com/v2-d87051cbdb49515fc57c93659f380a4a_b.jpg" data-caption="" data-size="normal" data-rawwidth="1086" data-rawheight="1246" class="origin_image zh-lightbox-thumb" width="1086" data-original="https://pic3.zhimg.com/v2-d87051cbdb49515fc57c93659f380a4a_r.jpg"/> 7 总结讨论 描述了许多不同类型的雷达杂波回波:地面、海洋、雨水和鸟类 。除非得到有效处理,否则这些环境和人为现象将产生各种离散和扩散、移动和静止的假目标,可以使用多种信号和数据 处理技术来抑制这些雷达杂波回波的影响。
8 参考文献 [1] 百度翻译
[2] MIT 公开课:Introduction to Radar Systems。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号