浙大《数据结构》第六章:图(上)
注:本文使用的网课资源为中国大学MOOC
https://www.icourse163.org/course/ZJU-93001
什么是图(Graph)
表示“多对多”的关系
包含:
- 一组顶点:通常由V(vertex)表示顶点集合
- 一组边:通常用E(edge)表示边的集合
- 边是顶点对:\((v,w) \in E\),其中\(v,w \in V\)
- 有向边<v,w>表示从v指向w的边(单行线)
- 不考虑重边和自回路
抽象数据类型定义
类型名称:图(graph)
数据对象集:G(V,E)由一个非空的有限顶点集合V和一个有限边集合E组成。
操作集:对于任意的图\(G \in Graph\),以及\(v \in V, e \in E\)。常见的操作有:
Graph Create(); // 建立并返回空图
Graph InsertVertex( Graph G, Vertex v ); // 将顶点v插入G
Graph InsertEdge( Graph G, Edge e ); // 将边e插入G
void DFS( Graph G, Vertex v ); // 从顶点v除法深度优先遍历图G
void BFS( Graph G, Vertex v ) // 从顶点v出发宽度优先遍历图G
void ShortestPath( Graph G, Vertex v, int Dist[] ); // 计算图G中顶点v到任意其他顶点的最短距离
void MST( Graph G ); // 计算图G的最小生成树
怎么在程序中表示一个图
用邻接矩阵表示
G[N][N] --- N个顶点从0到N-1编号
1、对于无向图的存储,怎样省一半空间?
答:用一个长度为N(N+1)/2的一维数组A存储{\(G_{00},G_{10},G_{11},...,G_{n-1,0},...,G_{n-1,n-1}\)},则\(G_{ij}\)在A中对应的下标是:
2、对于网络(带权重的图),只要把G[i][j]的值由(0,1)定义为\(<v_i,v_j>\)的权重即可。
3、邻接矩阵的好处:
- 直观、简单
- 方便检查任意一对顶点是否存在边
- 方便找任一顶点的所有“邻接点”(有边直接相连的顶点)
- 方便计算任一顶点的“度”(从该点发出的边数为“出度”,指向该点的边数为“入度”)
- 无向图:对应行(或列)非0元素的个数。
- 有向图:对应行非0元素的个数是“出度”;对应列非0元素的个数是“入度”。
4、邻接矩阵的缺点:
- 浪费空间:存稀疏图有大量的无效元素,对稠密图(特别是完全图)还是很划算
- 浪费时间:统计稀疏图中一共有多少条边时需要全局扫描。
邻接矩阵程序实现
/* 图的邻接矩阵表示法 */
#define MaxVertexNum 100 /* 最大顶点数设为100 */
#define INFINITY 65535 /* ∞设为双字节无符号整数的最大值65535*/
typedef int Vertex; /* 用顶点下标表示顶点,为整型 */
typedef int WeightType; /* 边的权值设为整型 */
typedef char DataType; /* 顶点存储的数据类型设为字符型 */
/* 边的定义 */
typedef struct ENode *PtrToENode;
struct ENode{
Vertex V1, V2; // 有向边<V1, V2>
WeightType Weight; // 权重
};
typedef PtrToENode Edge;
/* 图结点的定义 */
typedef struct GNode *PtrToGNode;
struct GNode
{
int Nv; // 顶点数
int Ne; // 边数
WeightType G[MaxVertexNum][MaxVertexNum]; // 邻接矩阵
DataType Data[MaxVertexNum]; // 存顶点的数据,若顶点无数据,则不需要出现Data[]
}
typedef PtrToGNode MGraph; // 以邻接矩阵存储的图类型
/* 初始化一个有VertexNum个顶点但没有边的图 */
MGraph CreateGraph( int VertexNum )
{
Vertex V, W;
MGraph Graph;
Graph = (MGraph)malloc(sizeof(struct GNode)); // 建立图
Graph->Nv = VertexNum;
Graph->Ne = 0;
/* 初始化邻接矩阵 */
/* 注意:这里默认顶点编号从0开始,到(Graph->Nv - 1) */
for (V=0; V < Graph->Nv; V++)
for (W=0; W < Graph->Nv; W++)
Graph->G[V][W] = INFINITY;
return Graph;
}
/* 向MGraph中插入边 */
void InsertEdge( MGraph Graph, Edge E )
{
/* 插入边 <V1, V2> */
Graph->G[E->V1][E->V2] = E->Weight;
/* 若是无向图,还要插入边<V2, V1> */
//Graph->G[E->V2][E->V1] = E->Weight;
}
/* 完整地建立一个MGraph */
/* 输入格式:
Nv Ne (边数和顶点个数)
V1 V2 Weight
....... (依次输入边的起点,终点,和权重) */
MGraph BuildGraph()
{
MGraph Graph;
Edge E;
Vertex V;
int Nv, i;
scanf("%d", &Nv); // 读入顶点个数
Graph = CreateGraph(Nv); // 初始化有Nv个顶点但没有边的图
scanf("%d", &(Graph->Ne)); // 读入边数
if ( Graph->Ne != 0 )
{
/* 如果有边 */
E = (Edge)malloc(sizeof(struct ENode)); // 建立边结点
/* 读入边,格式为"起点 终点 权重",插入邻接矩阵 */
for (i=0; i<Graph->Ne; i++)
{
scanf("%d %d %d", &E->V1, &E->V2, &E->Weight);
/* 注意:如果权重不是整型,Weight的读入格式要改 */
InsertEdge( Graph, E );
}
}
/* 如果顶点有数据的话,读入数据 */
for (V=0; V < Graph->Nv; V++)
scanf(" %c", &(Graph->Data[V]));
return Graph;
}
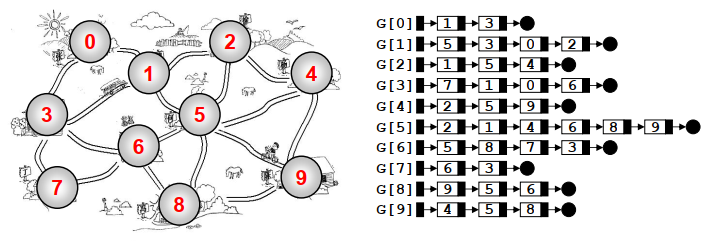
用邻接表表示
邻接表:G[N]为指针数组,对应矩阵每行一个链表,只存非0元素。(对于网络,结构中要增加权重的域)。如图所示:
1、邻接表的好处:
- 方便找任一顶点的所有邻接点;
- 节约稀疏图的空间,但是需要N个头指针 + 2E个结点(每个结点至少2个域)
- 方便计算任一顶点的度?
- 对于无向图:是的
- 对于有向图:只能计算“出度”;需要构造“逆邻接表”(存指向自己的边)来方便计算“入度”。
2、邻接表的缺点:
- 不能检查任意一对顶点间是否存在边。
邻接表程序实现
/* 图的邻接表表示法 */
#define MaxVertexNum 100 /* 最大顶点数设为100 */
typedef int Vertex; /* 用顶点下标表示顶点,为整型 */
typedef int WeightType; /* 边的权值设为整型 */
typedef char DataType; /* 顶点存储的数据类型设为字符型 */
/* 边的定义 */
typedef struct ENode *PtrToENode;
struct ENode{
Vertex V1, V2; // 有向边<V1, V2> /
WeightType Weight; // 权重
};
typedef PtrToENode Edge;
/* 邻接点的定义 */
typedef struct AdjVNode *PtrToAdjVNode;
struct AdjVNode
{
Vertex AdjV; // 邻接点下标
WeightType Weight; // 权重
PtrToAdjVNode Next; // 指向下一个邻接点的指针
}
/* 顶点表头结点的定义 */
typedef struct Vnode
{
PtrToAdjVNode FirstEdge; // 边表头指针
DataType Data; // 存顶点的数据
/* 注意:很多情况下,顶点无数据,此时Data可以不用出现 */
} AdjList[MaxVertexNum]; /* AdjList是邻接表类型 */
/* 图结点的定义 */
typedef struct GNode *PtrToGNode;
struct GNode
{
int Nv; // 顶点数
int Ne; // 边数
AdjList G; // 邻接表
}
typedef PtrToGNode LGraph; /* 以邻接表方式存储的图类型 */
/* 初始化一个有VertexNum个顶点但没有边的图 */
LGraph CreatGraph( int VertexNum )
{
Vertex V, W;
LGraph Graph;
Graph = (LGraph)malloc(sizeof(struct GNode));
Graph->Nv = VertexNum;
Graph->Ne = 0;
/* 注意:这里默认顶点编号从0开始,到(Graph->Nv - 1) */
for (V=0; V < Graph->Nv; V++)
Graph->G[V].FirstEdge = NULL;
return Graph;
}
/* 向LGraph中插入边 */
void InsertEdge( LGraph Graph, Edge E )
{
PtrToAdjVNode NewNode;
/***************** 插入边 <V1, V2> ****************/
/* 为V2建立新的邻接点 */
NewNode = (PtrToAdjVNode)malloc(sizeof(struct AdjVNode));
NewNode->AdjV = E->V2;
NewNode->Weight = E->Weight;
/* 将V2插入V1的表头 */
NewNode->Next = Graph->G[E->V1].FirstEdge;
Graph->G[E->V1].FirstEdge = NewNode;
/********** 若是无向图,还要插入边 <V2, V1> **********/
/* 为V1建立新的邻接点 */
NewNode = (PtrToAdjVNode)malloc(sizeof(struct AdjVNode));
NewNode->AdjV = E->V1;
NewNode->Weight = E->Weight;
/* 将V1插入V2的表头 */
NewNode->Next = Graph->G[E->V2].FirstEdge;
Graph->G[E->V2].FirstEdge = NewNode;
}
/* 完整地建立一个LGraph */
LGraph BuildGaph()
{
LGraph Graph;
Edge E;
Vertex V;
int Nv, i;
scanf("%d", &Nv); // 读入顶点个数
Graph = CreateGraph(Nv); // 初始化有Nv个顶点但没有边的图
scanf("%d", &(Graph->Ne)); // 读入边数
if ( Graph->Ne != 0 )
{
/* 如果有边 */
E = (Edge)malloc( sizeof(struct ENode) ); // 建立边结点
/* 读入边,格式为"起点 终点 权重",插入邻接矩阵 */
for (i=0; i<Graph->Ne; i++) {
scanf("%d %d %d", &E->V1, &E->V2, &E->Weight);
/* 注意:如果权重不是整型,Weight的读入格式要改 */
InsertEdge( Graph, E );
}
}
/* 如果顶点有数据的话,读入数据 */
for (V=0; V<Graph->Nv; V++)
scanf(" %c", &(Graph->G[V].Data));
return Graph;
}
图的遍历
深度优先搜索(DFS)
类似于树的先序遍历,它沿着树的深度,遍历树的结点,极可能深地搜索树的分支,当结点V的所有边都已被探寻过,搜索将回溯到发现结点V的那条边的起始结点,假设有如下二叉树。
A
/ \
B C
/ \ / \
D E F G
A是第一个访问的,然后顺序是B,D,然后是E,接着再是CFG。
若有N个顶点,E条边,时间复杂度是:
- 用邻接表存储图,有O(N+E)
- 用邻接矩阵存储图,有O(N^2)
/* DFS */
/* 输入:
Graph:已知图,V:起始顶点,VertexNum:顶点数,visited:用于标记的数组
*/
void ArrayGraph_DFS( MGraph Graph, Vertex V, int VertexNum, bool visited[] )
{
int i;
printf("%c\t",Graph->Data[V]);///先输出起始顶点,再输出访问的其他顶点
visited[V]=true;///事先将起始顶点标记为true
for (i=0; i<VertexNum; i++) // 遍历n的每个邻接点
{
if (Graph->G[V][i]!=0 && visited[i]==0) // 若第i个顶点与Graph->G[n]有关,并且未被访问
ArrayGraph_DFS(Graph,i,VertexNum,visited); //用递归的方式继续搜寻
}
}
广度优先搜索(BFS)
类似于树的层次遍历,从根节点开始,沿着树的宽度遍历树的节点。如果所有节点均被访问,则算法中止。
A
/ \
B C
/ \ / \
D E F G
这里A是第一个访问的,然后顺序是 B、C,然后再是 D、E、F、G。可以借助队列结构实现BFS访问。
若有N个顶点,E条边,时间复杂度是
- 用邻接表存储,O(N+E)
- 用邻接矩阵存储,O(N^2)
/* BFS */
/* 输入:
Graph:已知图,V:起始顶点,VertexNum:顶点数,visited:用于标记的数组
*/
void ArrayGraph_BFS( MGraph Graph, Vertex V, int VertexNum )
{
int i;
int visited[MAXN]; // visited数组用于标记顶点是否被访问
for (i=0; i<a; i++) // 对visited数组进行初始化,0为未访问,1为以访问,避免在搜寻过程中碰见闭环
visited[i]=0;
int flag=0; // flag为标记变量,用于防止出现两个或以上的连通分量导致的图为搜寻完成。
queue<Vertex> Q;
int tou; // 代表队首位置元素
while(!flag)
{
printf(" %c \t",G->Data[V]);
visited[V]=1; // 将起始位置标记为已访问
Q.push(V); // 起始顶点入队列
while ( !Q.empty() ) // 当队列不为空时,循环操作
{
tou = Q.front(); // 取队首位置元素 Q.pop(); // 将队首出队列
for (i=0; i<VertexNum; i++) // 遍历n的每个邻接点
{
if ( Graph->G[tou][i]!=0 && visited[i]==0 )
{
visited[i] = 1; // 标记已访问
Q.push(i); // 入列
}
}
}
flag=1; // 将flag标记为1,当顶点全部访问完成则结束循环,否则循环继续
for (i=0 i<VertexNum; i++)
{
if ( visited[i]==0 ) // 此循环用于判断顶点是否访问完成
{
flag=0;
n=i;
break;
}
}
}
}
如果图不连通怎么办?
连通:如果从v到w存在一条(无向)路径,则称v和w是连通的。
路径:v到w的路径是一系列顶点{\(V, v_1,v_2, ...,v_n, W\)}的集合,其中任一对相邻的顶点间都有图中的边,路径的长度是路径中的边数(如果带权,则是所有边的权重和)。如果v到w之间的所有顶点都不同,则称简单路径。
回路:起点等于终点的路径
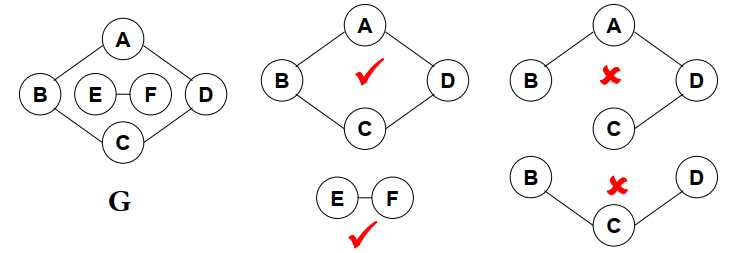
连通图:途中任意两顶点均连通。
连通分量:无向图的极大连通子图
- 极大顶点数:再加1个顶点就不连通了
- 极大边数:包含子图中所有顶点相连的所有边。
强连通:有向图中顶点v和w之间存在双向路径,则称v和w是强连通的
强连通图:有向图中任意两顶点均强连通
强连通分量:有向图的极大强连通子图
应用实例:拯救007
题意理解
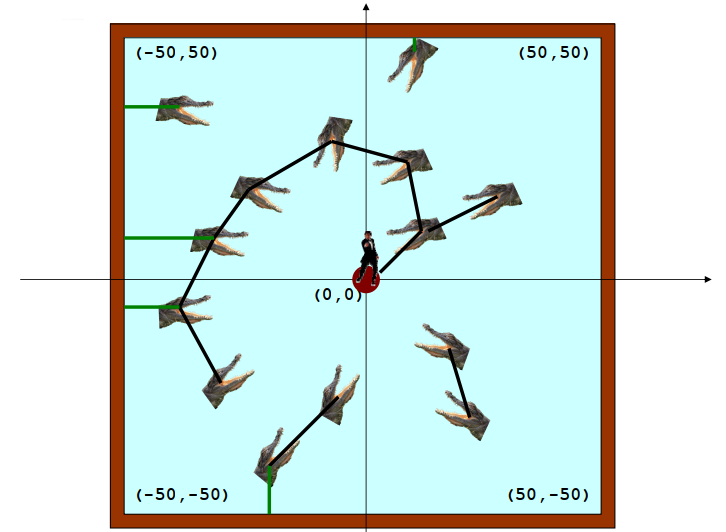
假设湖是一个100乘100的正方形。 假设湖的中心在(0,0),东北角在(50,50)。中央岛是直径为15,以(0,0)为中心的圆盘。许多鳄鱼在湖的不同位置。考虑到每个鳄鱼的坐标和詹姆斯可以跳跃的距离,你必须告诉他他是否可以逃脱。
输入格式
首先第一行给出两个正整数:鳄鱼数量 N(≤100)和007一次能跳跃的最大距离 D。随后 N 行,每行给出一条鳄鱼的 (x,y) 坐标。注意:不会有两条鳄鱼待在同一个点上。
输出格式
如果007有可能逃脱,就在一行中输出"Yes",否则输出"No"。
Sample Input
14 20
25 -15
-25 28
8 49
29 15
-35 -2
5 28
27 -29
-8 -28
-20 -35
-25 -20
-13 29
-30 15
-35 40
12 12
Sample Output
Yes
解题思路
利用DFS,遍历全部能"开始一步跳上"的鳄鱼,即每个连通图,如果遇到某个鳄鱼 “能上岸”,即退出遍历,输出“Yes”,如果全部连通图都遍历完成,还是不能上岸,则输出“No”。
程序实现
#include <math.h>
#include <stdio.h>
#include <stdlib.h>
#include <WinDef.h>
#define MaxVertexNum 101 /* 最大顶点数设为101 */
struct Crocodile
{
int x;
int y;
BOOL Isvisit; // 是否被访问
} cro[MaxVertexNum]; //存储鳄鱼坐标的数据结构
int N; // 鳄鱼数
int D; // 跳跃距离
/*************函数声明**************/
double Distance(int i, int j);
BOOL CanEscape(int i);
BOOL DFS(struct Crocodile cro[], int V);
/**********************************/
/* 主函数 */
/*********************************/
int main()
{
BOOL result = FALSE; //存储结果,是否能逃脱
scanf("%d %d", &N, &D);
cro[0].x = 0; //下标为0的结点为小岛
cro[0].y = 0;
cro[0].Isvisit = TRUE;
/* 输入鳄鱼坐标 */
for (int i = 1; i <= N; i++)
scanf("%d %d", &cro[i].x, &cro[i].y);
for (int i = 1; i <= N; i++)
{
if (Distance(0, i) <= (D + 7.5)) //从小岛跳到鳄鱼上
{
result = DFS(cro, i);
if (result)
{
printf("Yes\n");
break;
}
}
}
if (!result)
printf("No\n");
system("pause"); //程序暂停,显示按下任意键继续
return 0;
}
/***********************************/
/* 计算两个鳄鱼的距离 */
/* INPUT: i ——代表第i个鳄鱼坐标 */
/* j ——代表第j个鳄鱼坐标 */
/* RETURN: 两个鳄鱼的直线距离 */
/***********************************/
double Distance(int i, int j)
{
double b;
b = sqrt(pow(cro[i].x - cro[j].x, 2) + pow(cro[i].y - cro[j].y, 2));
return b;
}
/***********************************/
/* 判断是否能从当前鳄鱼跳一次就否脱离 */
/* INPUT: i ——鳄鱼的编号 */
/* RETURN: 能则TRUE,不能则是FALSE */
/***********************************/
BOOL CanEscape(int i)
{
// 分别计算当前结点与岸边的距离
// 即与 (x,50),(x,-50),(50,y),(-50,y) 的距离
if (abs(cro[i].x - 50) <= D || abs(cro[i].x + 50) <= D
|| abs(cro[i].y + 50) <= D || abs(cro[i].y - 50) <= D)
return TRUE; // 如果该鳄鱼位置和"岸边"相邻,将情况置为 TRUE
return FALSE;
}
/************************************/
/* 深度搜索 */
/* INPUT: cro ——鳄鱼的结点 */
/* V ——当前鳄鱼的标号 */
/* RETURN: 能则TRUE,不能则是FALSE */
/************************************/
BOOL DFS(struct Crocodile cro[], int V)
{
BOOL result = FALSE; // 存储结果,是否能逃脱
cro[V].Isvisit = TRUE; // 当前坐在的鳄鱼
if (CanEscape(V)) // 出口条件
result = TRUE;
else
{ //递归部分
for (int i = 1; i <= N; i++)
{
if ((cro[i].Isvisit == FALSE) && (Distance(V, i) <= D)) //当没有访问过且能跳过去
result = DFS(cro, i);
}
}
return result;
}
运行结果
应用实例:六度空间
题意理解
你和任何一个陌生人之间所间隔的人不会超过六个,给定社交网络图,请对每个节点计算符合“六度空间”理论的结点占结点总数的百分比。
输入格式
输入第1行给出两个正整数,分别表示社交网络图的结点数N(\(1<N \le 10^4\),表示人数),边数M(\(\le 33*N\),表示社交关系数)。随后的M行对应M条边,每行给出一对正整数,分别是该条边直接连通的两个结点的编号(节点从1到N编号)。
输出格式
对每个结点输出与该结点距离不超过6的结点数占结点总数的百分比,精确到小数点后2位。每个结节点输出一行,格式为“结点编号:(空格)百分比%”。
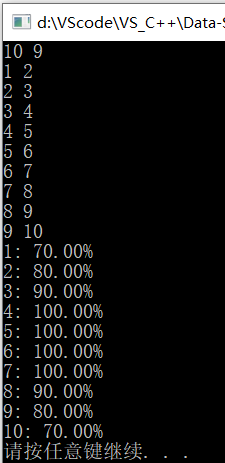
Sample Input
10 9
1 2
2 3
3 4
4 5
5 6
6 7
7 8
8 9
9 10
Sample Output
1: 70.00%
2: 80.00%
3: 90.00%
4: 100.00%
5: 100.00%
6: 100.00%
7: 100.00%
8: 90.00%
9: 80.00%
10: 70.00%
解题思路
- 对节点进行广度优先搜索
- 搜索过程中累计访问的节点数
- 需要记录“层数”,仅计算6层以内的节点数
- 边数 M 最大是顶点数 N 的 33 倍,很容易成为"稀疏图",为了节省空间,采用邻接表方式存储
- BFS 适合统计步数,选用 BFS 对图遍历
- 为了节省空间,统计步数使用3个变量
- level,记录当前层数,如果 level=6 结束循环返回
- tail,记录当前入队元素,每遍历一个结点就更新一次,入队元素肯定是当前出队元素的下一层,当必要时,更新 last 为 tail,就记录了下一层的最后一个数
- last,记录当前层,当前层最后一个数,当当前出队元素v与 last 相等,说明该层遍历完成,更新 last = tail
如图所示:
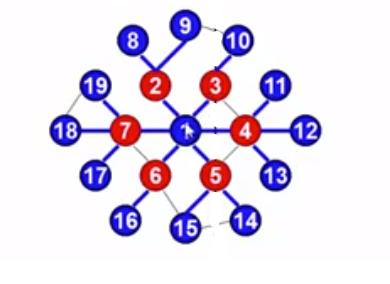
首先访问顶点1,顶点1入队,因为1所在0层,所以此时level=0.同时1是第0层入队的最后一个元素,所以 last=1 ;
然后让顶点1出队,按编号从小到大访问1的邻接点2,3,4,5,6,7,每访问一个邻接点就将值赋给tail,所以此时 tail=7 ,当1的邻接点访问完毕,last=1,说明第0层入队的元素已经都访问完毕,且第0层所有的元素的邻接点都已访问完毕,即第1层也被访问完毕,此时level++,且让last更新为tail。
依次类推,当 level=6 时,直接退出BFS。
#include <iostream> /* 引入命名空间,以及模块化I/O */
#include <queue> /* 引用队列,常用函数有empty,push,front,back,pop,size */
#include <stdio.h>
#include <stdlib.h>
using namespace std;
#define MAXV 1005
/***********全局变量***********/
typedef int vertex;
typedef struct Node *AdjList;
struct Node
{
vertex Adjv; // 当前下标
AdjList Next; // 下一个
};
AdjList G[MAXV]; // 使用邻接表来构建图
bool Isvisit[MAXV]; // 是否访问
int N; // 图的结点数
int M; // 图的边数
/***********函数声明***********/
int BFS(vertex v); // 起始点为v的BFS搜索
void SDS(); // 六度空间查找
/**********************************/
/* 主函数 */
/**********************************/
int main()
{
vertex v1, v2; // 图的顶点
AdjList NewNode;
scanf("%d%d", &N, &M);
// 初始化点,从 1—N
for (int i = 1; i <= N; i++)
{
G[i] = (AdjList)malloc(sizeof(struct Node));
G[i]->Adjv = i;
G[i]->Next = NULL;
}
// 初始化边
for (int i = 0; i < M; i++)
{
scanf("%d%d", &v1, &v2);
NewNode = (AdjList)malloc(sizeof(struct Node));
NewNode->Adjv = v2;
NewNode->Next = G[v1]->Next;
G[v1]->Next = NewNode;
NewNode = (AdjList)malloc(sizeof(struct Node));
NewNode->Adjv = v1;
NewNode->Next = G[v2]->Next;
G[v2]->Next = NewNode;
}
// 运行主函数算法
SDS();
system("PAUSE");
return 0;
}
/***********************************/
/* 广度优先搜索 */
/* INPUT: v ——广度优先搜索的起始点 */
/* RETURN: 符合六度空间的顶点个数 */
/***********************************/
int BFS(vertex v)
{
int last, tail, level; // 三个辅助变量
vertex W;
AdjList node;
queue<int> q; // 定义队列q
Isvisit[v] = true;
int count = 1; // 计数器初始值为1
q.push(v);
level = 0;
last = v; //第0层最后一个入队的元素是v
/*进入核心循环*/
while (!q.empty())
{
W = q.front();
q.pop();
// G[i]第一个结点存自己的下标
node = G[W]->Next;
while (node)
{
if (!Isvisit[node->Adjv])
{
Isvisit[node->Adjv] = true;
q.push(node->Adjv);
count++;
tail = node->Adjv; // 每次更新该结点
}
node = node->Next;
}
// 如果该当前结点是这层最后一个结点
if (W == last)
{
level++; // 层数 +1
last = tail; // 更改 last
}
// 层数够了结束
if (level == 6)
break;
}
return count;
}
/***********************************/
/* 六度空间查找 */
/***********************************/
void SDS()
{
int count;
for (vertex v = 1; v <= N; v++)
{
// 由于要重复查找,需要将Isvisit序列填充为false,长度为MAXV
fill(Isvisit, Isvisit + MAXV, false);
count = BFS(v);
printf("%d: %.2f%%\n", v, count * 100.0 / N);
}
}
运行结果