Relation-Shape Convolutional Neural Network for Point Cloud Analysis(CVPR 2019)
代码:https://github.com/Yochengliu/Relation-Shape-CNN
文章:https://arxiv.org/abs/1904.07601
作者直播:https://www.bilibili.com/video/av61824733
作者维护了一个收集一系列点云论文、代码、数据集的github仓库:https://github.com/Yochengliu/awesome-point-cloud-analysis
这篇paper是CVPR 2019 Oral & Best paper finalist
Abstract & Introduction
在点云中,由于不规则点中隐含的形状很难捕捉,使得点云分析非常具有挑战性。在本文中,作者针对点云数据提出了RS-CNN,即Relation-Shape Convolutional Neural Network,其核心思想是从几何拓扑中学习点云关系信息。RS-CNN在多个数据集中都取得了SOTA的表现。
主要贡献如下:
- 提出了一种新型的从关系中学习的卷积算子关系形状卷积。它可以显式地对点的几何关系进行编码,从而在很大程度上提高了对形状的感知能力和鲁棒性。即,RS-Conv
- 提出一个具有关系形状卷积的深层层次结构,即,RS-CNN。将规则网格CNN扩展到不规则配置,实现点云的上下文形状感知学习。即,基于RS-Conv设计的RS-CNN
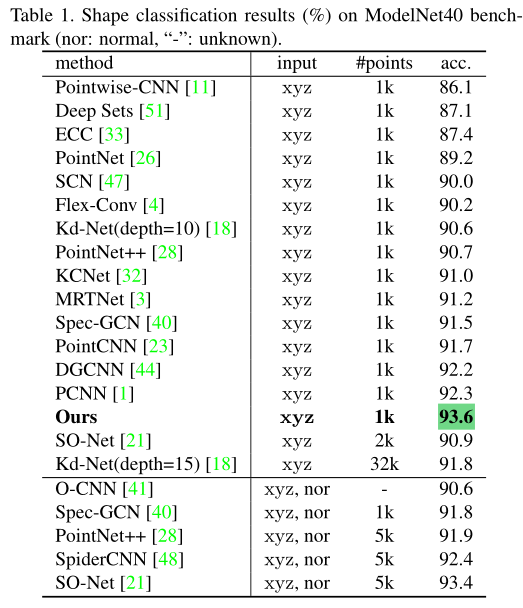
- 在三个任务中对具有挑战性的基准进行广泛的实验,以及深入的经验和理论分析,证明RS-CNN达到了SOTA的水平。即,精度高效果好(modelnet40 93.6)
Shape-Aware Representation Learning
首先,作者归纳了一个通用的卷积公式
其中,\(x\)表示3D点,\(f_{x_j}\)表示\({x_j}\)的特征向量,\(d_{ij}\)是\(x_i\)和\(x_j\)之间的欧式距离Euclidean distance,\(\tau\)用于转化单点特征,\(\mathcal{A}\)表示聚合函数,\(\sigma\)为激活函数。在这个公式中,\(\mathcal{A}\)和\(\tau\)的定义很关键,也就是这篇paper的创新所在。
首先,如果将这个公式套用在2D图像当中,则\(\tau(f_{x_{j}})=W_j \cdot f_{x_j}\),其中\(w_j\)为learnable weight(可以理解为卷积核),“\(\cdot\)”表示点乘,\(\mathcal{A}\)表示求和,其实就是一个卷积操作。而传统卷积有两个问题,1是不具备置换不变性,2是没有学习到形状信息。因此,作者对\(\mathcal{A}\)和\(\tau\)进行了修改,使其处理点云信息时,具有置换不变性,以及能够学习到形状信息。置换不变性在pointnet中已经实现,就是用max来表示\(\mathcal{A}\),那么剩下的就是学习形状信息,那么如何学习形状信息?就是通过这个\(\tau\)实现的。
为了捕获形状信息(或者关系信息),作者将\(\tau\)定义为:
\(\mathcal{M}\)用于将两个点的关系映射为high-level的信息(\(\mathcal{M}\)实际上就是MLP,将低维特征映射成高维特征,而低维特征就是点的位置关系,比如两个点间的距离,相对坐标等),而\(h_{ij}\)就是低维特征。
RS-Conv的流程图如下:
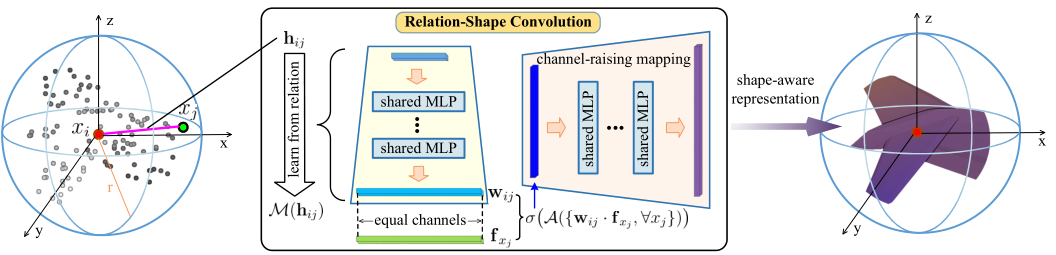
- 首先通过FPS进行采样,得到质心\(X_i\)
- 在球形领域寻找近邻,\(X_j\)
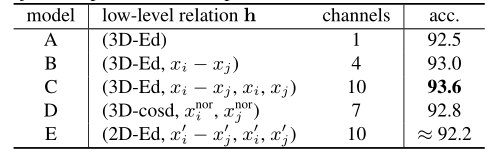
- 对于每个邻居点j,计算j和i的low-level信息,即\(h_{ij}\),\(h_{ij}\)的表示方法很多,作者在论文中将其定义为\(h_{ij}=[3D-Ed,x_i-x_j,x_i,x_j]\),即将两点间的欧式距离(1维),相对坐标(3维),i的坐标(3维)和j的坐标(3维)进行拼接,得到一个10维的low-level信息。
- 使用MLP将\(h_{ij}\)映射成高维信息,即\(\mathcal{M}(h_{ij})\),得到\(W_{ij}\),注意,这边映射成高维信息的\(W_{ij}\)的维度要和\(f_{x_j}\)的特征维度相同,才可以进行点乘操作
- 将得到的\(W_{ij}\)和\(f_{x_j}\)进行点乘。
- max操作,聚合所有近邻的信息作为质心\(x_i\)的新特征,接着为了实现更强大的形状感知表示,将\(x_i\)进行进一步的通道提升映射。即上图中的channel-raising mapping
以上就是RS-Conv的操作过程。有点复杂,类比成2D图像的卷积的话,一个明显的区别是RS-Conv的卷积核\(W_{ij}\)是通过\(h_{ij}\)(即低维关系信息)学习来的,这也是本文的最大创新点,但实际上,这个操作在其他论文中也有出现,比如GACnet,DGCNN只是他们定义\(h_{ij}\)的方式不同。
网络结构如下
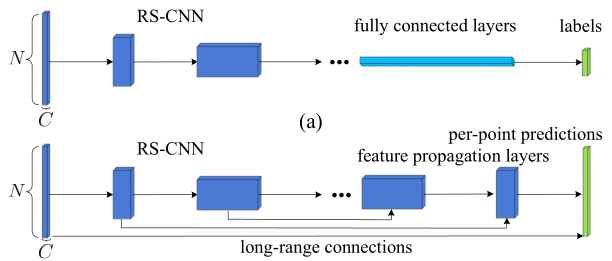
比较简单,不赘述,具体如何实现需要看代码。
实验
Shape classification.
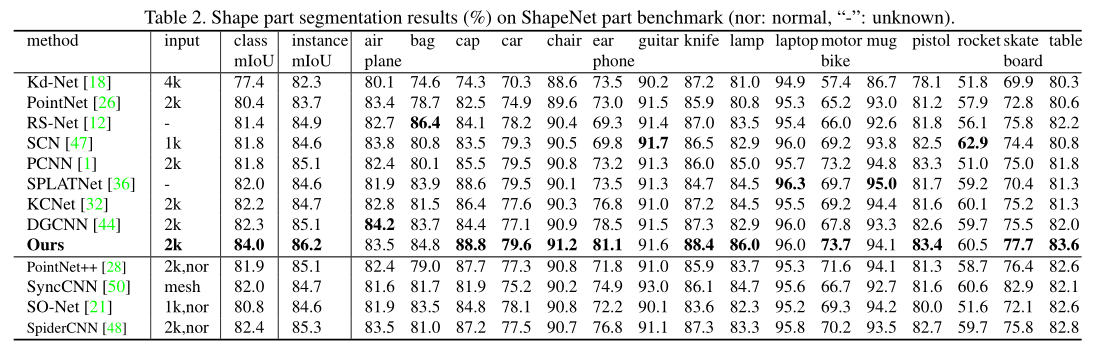
Shape part segmentation
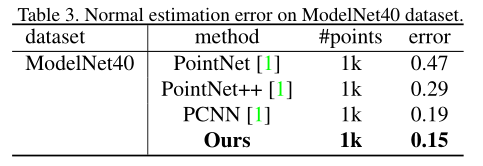
Normal estimation
消融实验
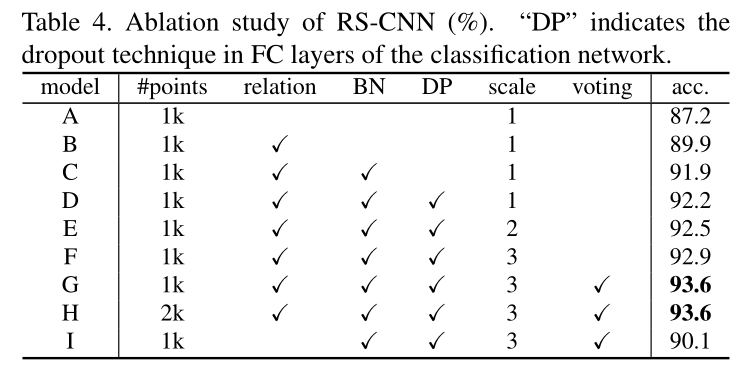
虽然在modelnet40上取得了93.6的结果,但是看消融实验可知,作者加入了很多trick才得到这样的精度,比如Pointnet++中的多尺度,以及voting test(具体是啥暂不明了),如果去除多尺度和voting test只能达到92.2的精度。虽说创新点少,但论文中那么多的分析也需要大量的积累才能做到。
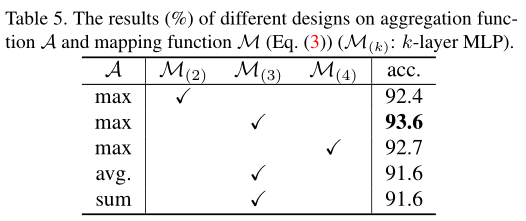
聚合函数,即\(\mathcal{A}\)的消融实验
对于low-level信息,即\(h_{ij}\)的消融实验
总结
在这项工作中,作者提出了RS-CNN,即 Relation-Shape Convolutional Neural Network,它将规则的网格CNN扩展到不规则的配置来进行点云分析。 RS-CNN的核心是一种从低维信息中学习relation的新型的卷积运算器。通过这种方式,可以对点的空间布局进行明确的推理,从而获得判断形状的意识。此外,还可以获得良好的几何关系支撑,如对刚性变换的鲁棒性。因此,RS-CNN可以实现上下文感知的形状学习,具有很高的学习效率。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号