
OpenCV源码解析之findContours
说明:openCv的contours是分级的,其寻边理论依据(方式)参考suzuki的论文《Topological structural analysis of digitized binary images by border following》。
Contour 的寻边模式 Mode
openCV通过一个矩阵来管理等级,矩阵的元素表示方法是:[Next, Previous, First_Child, Parent]

RETR_LIST:列出所有的边,没有父子层级之分(全部边缘都为1级)。
在这种模式下,这8条边建立的等级关系为
[ 1, -1, -1, -1], [ 2, 0, -1, -1], [ 3, 1, -1, -1], [ 4, 2, -1, -1],
[ 5, 3, -1, -1], [ 6, 4, -1, -1], [ 7, 5, -1, -1], [-1, 6, -1, -1]
例如边“0”,其同等级的Next是边“1”,前一个不存在(-1),没有First_Child, Parent,这两个参数也都设为-1,所以第0个元素是
[1,-1,-1,-1];边“1”,其同等级的Next是边“2”,前一个边是“0”,没有First_Child, Parent,两个-1,所以第1个元素是[2,0,-1,-1];依次类推。
RETR_EXTERNAL:列出最外面的边(如物体的外边框),不管被包围的内环或边(如物体的孔洞)。
RETR_CCOMP:只取2个层级的边,如下图,只把边(粉红色)分为两个层(绿色),标记为绿色的(1)顶层和(2)次层。

上面图中,这9条边建立的等级关系为
[ 3, -1, 1, -1], [ 2, -1, -1, 0], [-1, 1, -1, 0], [ 5, 0, 4, -1], [-1, -1, -1, 3],
[ 7, 3, 6, -1], [-1, -1, -1, 5], [ 8, 5, -1, -1], [-1, 7, -1, -1]
例如第"0"边,其相邻的Next是边"3", Previous不存在(-1),First-child=边"1",Parent不存在(-1),所以其相应的元素为
[3, -1, 1, -1],其余元素依此规则类推。
RETR_TREE:返回所有的边及层级关系,

这9条边建立的等级关系为
[ 7, -1, 1, -1], [-1, -1, 2, 0], [-1, -1, 3, 1], [-1, -1, 4, 2], [-1, -1, 5, 3],
[ 6, -1, -1, 4], [-1, 5, -1, 4], [ 8, 0, -1, -1], [-1, 7, -1, -1]
注意cvDrawContours
findContours往往和drawContours配合使用,
cvDrawContours 函数第5个参数为 max_level,等级的含义,从前面可以知道,只有提取有等级的轮廓时候(提取模式设为 CV_RETR_CCOMP或CV_RETR_TREE)这个参数才有意义。
MAX_SIZE
static const int MAX_SIZE = 16;
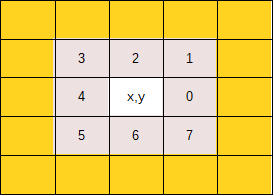
MAX_SIZE=16是为了节省计算量。因为在最差的情况下,向左或向右旋转遍历(x,y)周边的8个像素时(如下图所示),8连通需要计算8次,如果采用最大值是8,则每次都要采用计算更大的越界检查来判断序号是否在0~7之间。
CV_INIT_3X3_DELTAS
/* initializes 8-element array for fast access to 3x3 neighborhood of a pixel */
#define CV_INIT_3X3_DELTAS( deltas, step, nch ) \
((deltas)[0] = (nch), (deltas)[1] = -(step) + (nch), \
(deltas)[2] = -(step), (deltas)[3] = -(step) - (nch), \
(deltas)[4] = -(nch), (deltas)[5] = (step) - (nch), \
(deltas)[6] = (step), (deltas)[7] = (step) + (nch))
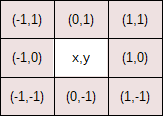
CV_INIT_3X3_DELTAS是完成下面这个偏移量计算的,比如点a(x,y)到b(x+1,y),此时对应deltas(0),即在内存中,假设已经知道了a点的位置,直接使用b=a+deltas(0)即可得到b点的序号。nch是偏移步进距离,这里是1,如果是2就会对应更外面一层,如图中黄色层。
icvCodeDeltas
static const CvPoint icvCodeDeltas[8] =
{ CvPoint(1, 0), CvPoint(1, -1), CvPoint(0, -1), CvPoint(-1, -1), CvPoint(-1, 0), CvPoint(-1, 1), CvPoint(0, 1), CvPoint(1, 1) };
icvCodeDeltas 描述的是下面这个关系,对照上图序号,比如icvCodeDeltas(序号0).x = 1, icvCodeDeltas(序号0).y = 0, 表示在图片中序号为0的像素相对于中心像素(x,y)的相对位置偏移量为(1,0)。
参数
- nbd, number of border
源码
static void
icvFetchContourEx( schar* ptr,
int step,
CvPoint pt,
CvSeq* contour,
int _method,
int nbd,
CvRect* _rect )
{
int deltas[MAX_SIZE];
CvSeqWriter writer;
schar *i0 = ptr, *i1, *i3, *i4 = NULL;
CvRect rect;
int prev_s = -1, s, s_end;
int method = _method - 1;
CV_DbgAssert( (unsigned) _method <= CV_CHAIN_APPROX_SIMPLE );
CV_DbgAssert( 1 < nbd && nbd < 128 );
/* initialize local state */
CV_INIT_3X3_DELTAS( deltas, step, 1 );
memcpy( deltas + 8, deltas, 8 * sizeof( deltas[0] ));
/* initialize writer */
cvStartAppendToSeq( contour, &writer );
if( method < 0 )
((CvChain *)contour)->origin = pt;
rect.x = rect.width = pt.x;
rect.y = rect.height = pt.y;
s_end = s = CV_IS_SEQ_HOLE( contour ) ? 0 : 4; // hole从quad 0开始,外边界从quad 4开始
do
{
s = (s - 1) & 7;
i1 = i0 + deltas[s];
}
while( *i1 == 0 && s != s_end );
if( s == s_end ) /* single pixel domain */
{
*i0 = (schar) (nbd | 0x80);
if( method >= 0 )
{
CV_WRITE_SEQ_ELEM( pt, writer );
}
}
else
{
i3 = i0;
prev_s = s ^ 4;
/* follow border */
for( ;; )
{
CV_Assert(i3 != NULL);
s_end = s;
s = std::min(s, MAX_SIZE - 1);
while( s < MAX_SIZE - 1 )
{
i4 = i3 + deltas[++s];
CV_Assert(i4 != NULL);
if( *i4 != 0 )
break;
}
s &= 7;
/* check "right" bound */
if( (unsigned) (s - 1) < (unsigned) s_end ) // 该条件表示,外轮廓最右边的标记改为NBD的负值。
{ // 这个条件是为了避免轮廓右边的部分被再次当做初始点。遇到负值的像素点是不判断它是否为一个新轮廓的起始点的,确保一个轮廓只扫描一次。
*i3 = (schar) (nbd | 0x80);
}
else if( *i3 == 1 )
{
*i3 = (schar) nbd;
}
if( method < 0 )
{
schar _s = (schar) s;
CV_WRITE_SEQ_ELEM( _s, writer );
}
else if( s != prev_s || method == 0 )
{
CV_WRITE_SEQ_ELEM( pt, writer );
}
if( s != prev_s )
{
/* update bounds */
if( pt.x < rect.x )
rect.x = pt.x;
else if( pt.x > rect.width )
rect.width = pt.x;
if( pt.y < rect.y )
rect.y = pt.y;
else if( pt.y > rect.height )
rect.height = pt.y;
}
prev_s = s;
pt.x += icvCodeDeltas[s].x;
pt.y += icvCodeDeltas[s].y;
if( i4 == i0 && i3 == i1 ) break;
i3 = i4;
s = (s + 4) & 7;
} /* end of border following loop */
}
rect.width -= rect.x - 1;
rect.height -= rect.y - 1;
cvEndWriteSeq( &writer );
if( _method != CV_CHAIN_CODE )
((CvContour*)contour)->rect = rect;
CV_DbgAssert( (writer.seq->total == 0 && writer.seq->first == 0) ||
writer.seq->total > writer.seq->first->count ||
(writer.seq->first->prev == writer.seq->first &&
writer.seq->first->next == writer.seq->first) );
if( _rect ) *_rect = rect;
}
未完待续……
参考
[1] https://docs.opencv.org/trunk/d9/d8b/tutorial_py_contours_hierarchy.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号