李宏毅《机器学习》总结 - 如何进行 optimization
核心问题:Critical Point
在 Gradient Descent 的时候,如果遇到梯度为 0 的情况,导致无法继续 optimization,这样的点叫做 Critcal Point
如果最后优化的结果不好,则出现这样的点的原因有 2 个:一个是到 local minima 了,另一个是在驻点了(也叫鞍点,Saddle Point)。现在主要关注的是如何判断是鞍点的情况,并继续 optmization 下去。
有一种数学的方法,是利用黑塞矩阵(类比多元函数的极值求法,写出二元函数的泰勒展开),此处不深究
实践中常用的是减小 batch 和设置一个 momentum,除此之外,还可以自动调整学习率(也就是 )
batch
什么是 batch?在梯度下降的时候,需要求出 loss 的梯度,每次求出梯度之后在乘上 learning rate(超参数,即 )作为位置的改变量。现在,我将 loss 设置为训练中一部分数据的 loss 值,这一部分数据就叫一个 batch(然后将源数据shuffle之后再分出batch,继续……)
经过研究发现,batch 比较小的时候,优化的效果比较好。(感性理解:可以认为是步长比较小,因此更容易得到最优解,而不是在最优解两头不停震荡)
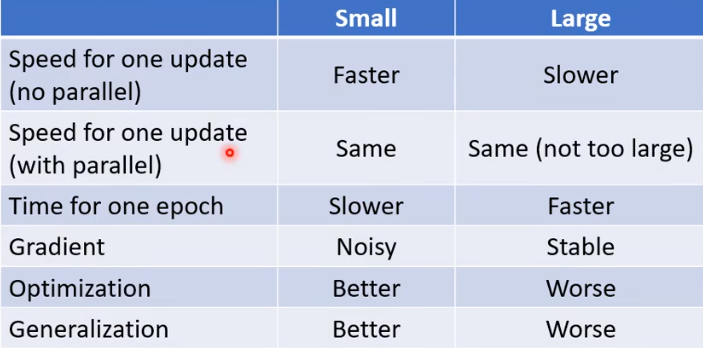
batch size也是一个需要人为决定的超参数。
momentum
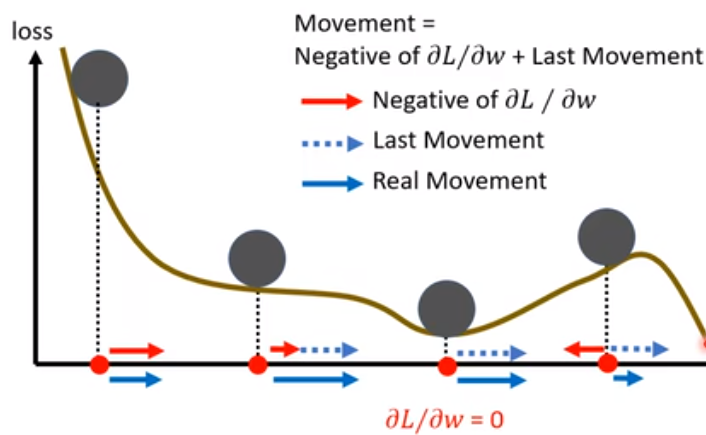
考虑在 optimization 的过程中引入“惯性”的概念,每次移动的方向不光是由梯度决定,而是还与之前的移动方向有关。
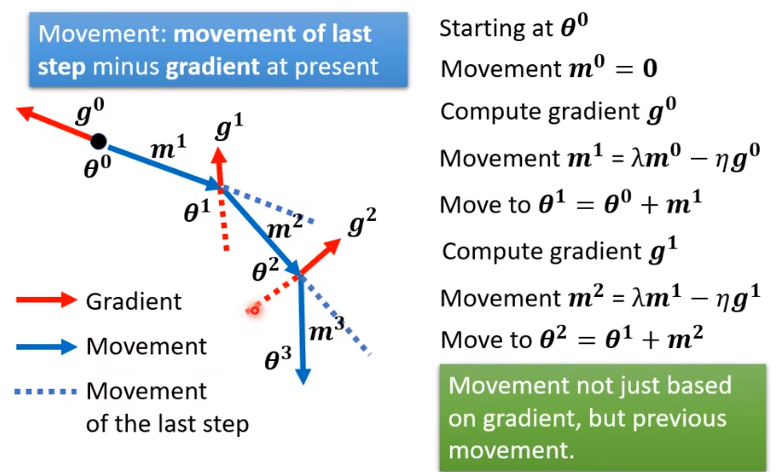
这样,我们就在处理 critical point 的时候不会被梯度为 0 的点卡爆了,因为移动的方向还与之前的移动的方向有关。
自动调整 learning rate
目前,我们以只有两个参数为例(多个参数的情况完全同理,只不过不容易用图表示),在两个参数为 点处,计算出 loss 值作为这个点的“函数值”,用热力图表示函数值,这样的图叫做 error surface
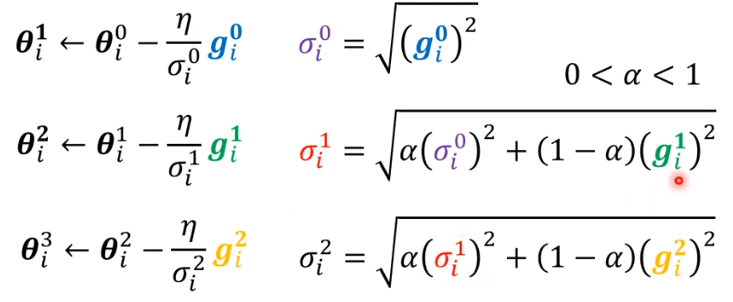
如果 loss 最小的点在一个很“平坦”的空间上,就会导致附近的梯度很小,从而根据 (其中 代表我想要 optimize 的参数, 代表 learning rate, 代表当前这个位置 loss 函数的梯度) 收敛很慢,可能就到达不了这个点。如果把 learning rate 设的大一点呢?那如果最优解在梯度比较大的地方的话,就会导致答案在这附近震荡
能不能根据当前的梯度来设定 learning rate呢?如果梯度大,那就把 learning rate 设的小点,反之同理,使得能够更快的收敛,且不至于震荡。
一个想法(Adagrad):
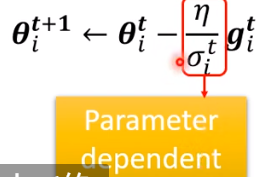
其中, 为 之前的所有梯度的二次幂平均
这样,learning rate就是和之前的梯度有关,且成反比,这样也保证了之前所说的要求。
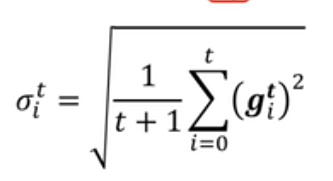
另外一种方法也与之类似,不过略有不同
(RMSProp):
其中 也是需要自己决定的超参数,决定了是之前的梯度重要还是当前这次的梯度更重要
这样,当遇到梯度较大的时候,就能“刹住车”了,较小的时候就“踩油门”,解决了这个问题
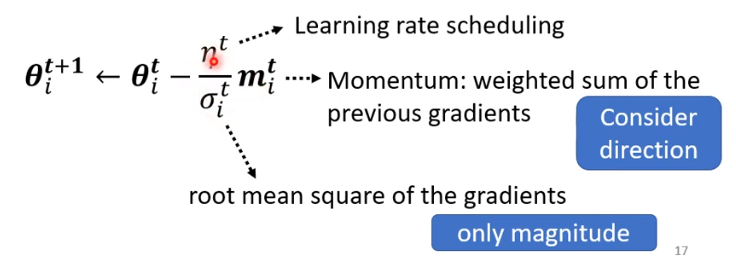
pytorch 封装好的模型 Adam 就是 RMSProp + Momentum
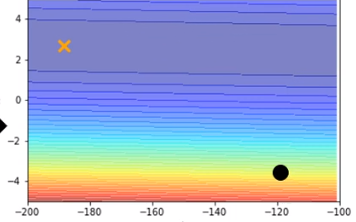
这样 optimizer 在 error face 跑出来的结果如下:
能到最优点了,但是到最后开始震荡了?
因为到最优点附近的梯度很小,就导致 learning rate 很大,就开始震荡了。
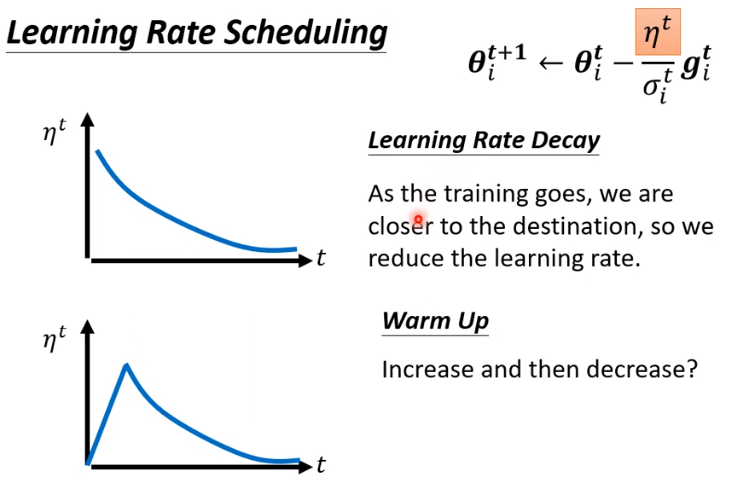
怎么解决这个问题呢?和模拟退火有点类似,将 设成是时间的函数,随时间减小。这个过程叫做 learning rate scheduling
有两种写法,都 ok
总结一下优化方法
- batch 这个就是求梯度之前就应该分好,求完一次之后 shuffle 再求
- momentum 可以将梯度替换成 momentum(带惯性的梯度)
- learning rate 的修改:与过去的梯度有关/与时间有关


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 无需6万激活码!GitHub神秘组织3小时极速复刻Manus,手把手教你使用OpenManus搭建本
· C#/.NET/.NET Core优秀项目和框架2025年2月简报
· Manus爆火,是硬核还是营销?
· 一文读懂知识蒸馏
· 终于写完轮子一部分:tcp代理 了,记录一下