无刷电调基础知识以及BLHeli固件烧录和参数调整
基础知识
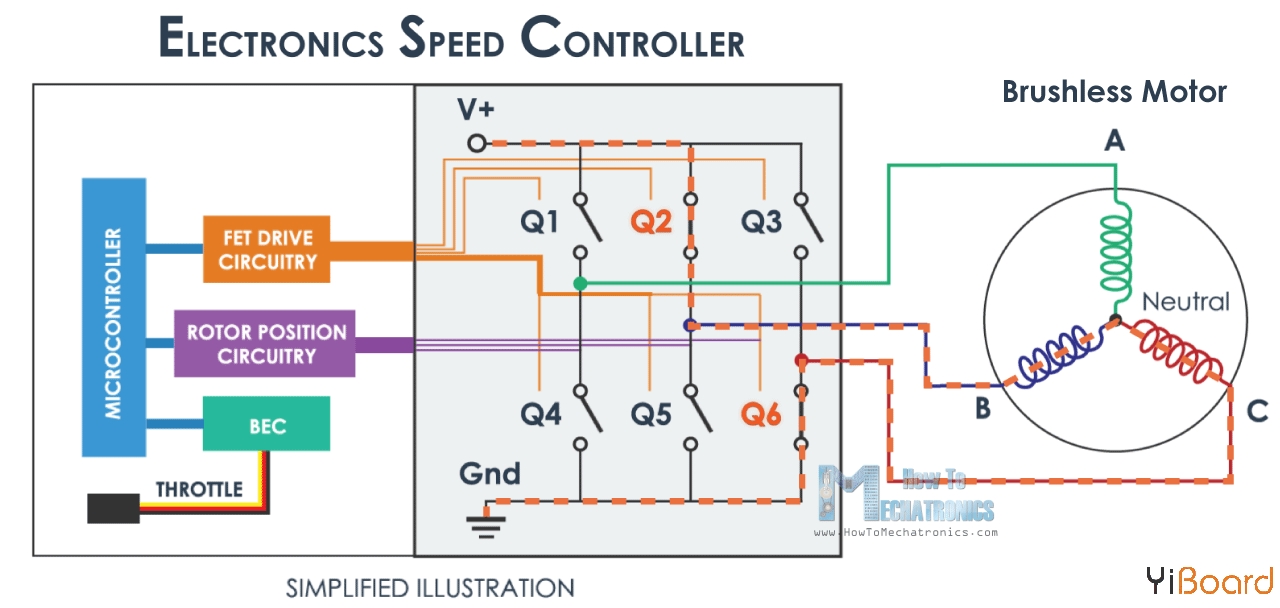
电调
- ESC代表电子速度控制器,简称为电调。电调从飞行控制器接收油门信号,并以所需速度驱动无刷电机。
电调固件
- 电调固件是在每个电调上运行的软件,它确定电调的性能,支持的协议以及可以使用的配置接口。电调可以使用的固件取决于硬件。
- SimonK:最古老的两种开源电调固件之一,已经过时不再更新。
- BLHeli:最古老的两种开源电调固件之一,由于其广泛的功能和友好的用户界面而变得流行。
- BLHeli_S:BLHeli固件的第二代。专门为具有Busybee处理器的电调开发。
- BLHeli_32:第三代和最新一代BLHeli固件。专门为32位电调编写,不再开源。
电调处理器
- 市场上大多数电调使用ATMEL、Silabs和ARM的处理器。不同的处理器具有不同的规格和功能,并且受不同的固件支持。
- ATMEL 8位:支持SimonK和BLHeli固件。
- SILABS 8位:支持BLHeli或BLHeli_S固件。
- 主要处理器是F330和F39X系列的F390和F396。
- Busybee处理器是F330和F39X的升级。有BusyBee1(EFM8BB10F8)和BusyBee2(EFM8BB21F16)两种。
- ARM 32位:支持BLHeli_32固件。
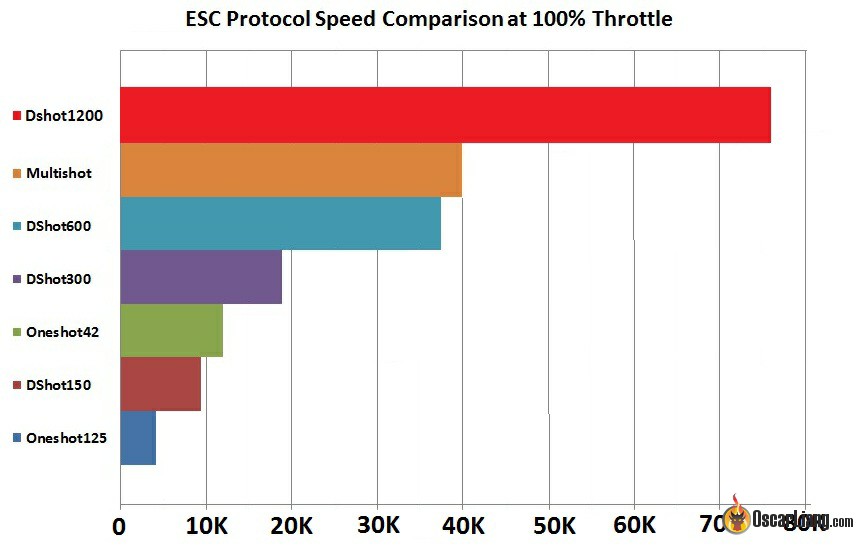
电调协议
- 电调协议是飞行控制器和电调用于通信的语言,决定了信号从飞控到电调的发送速度。
- 四轴飞行器使用的电调协议及信号宽度
- Standard PWM :1000us – 2000us
- Oneshot125:125us – 250us
- Oneshot 42:2us – 84us
- Multishot:5us – 25us
- Dshot
- Dshot150 :106.8us
- Dshot300 :53.4us
- Dshot600 :26.7us
- DShot1200:13.4us
- ProShot
电调BEC
- BEC表示 电池消除电路,本质上是电压调整器。作用是将主电池组的电压降压到5V输出。
- 通常内置在电调中,消除了为5V电子设备供电所需的单独电池的麻烦。
BLHeliSuite
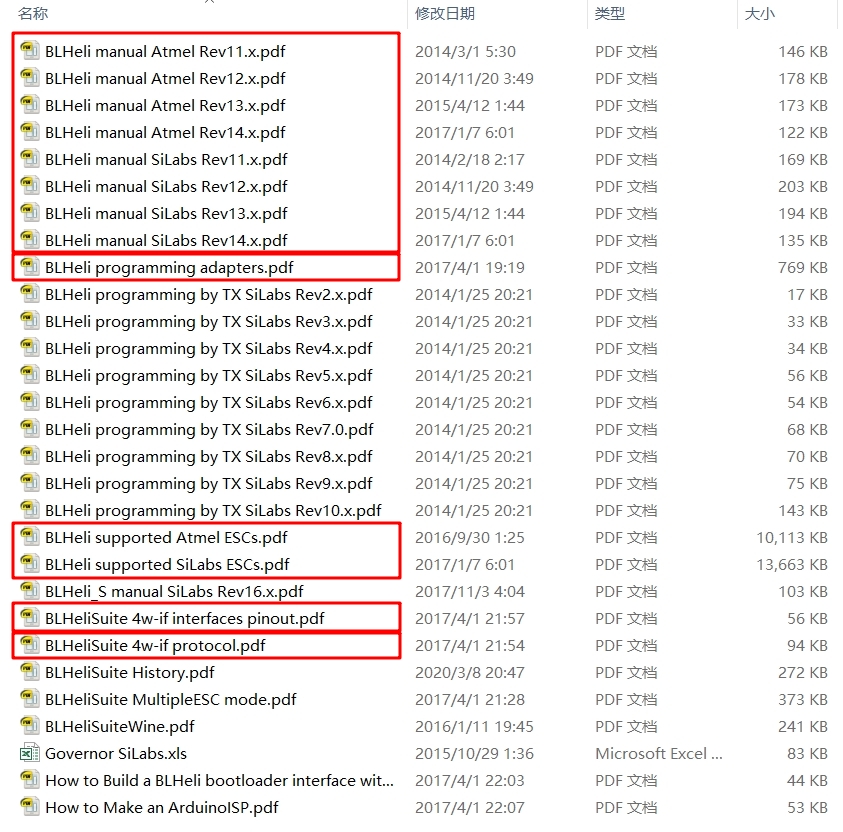
手册
- BLHeliSuite的手册位于BLHeliSuite的Manuals目录
- BLHeliSuite的手册主要文件内容:
BLHeli manual xx xx.pdf:Atmel MCU和SiLabs MCU的电调的参数BLHeli programming adapters.pdf:适配器的制作和使用BLHeli supported xx ESCs.pdf:支持的Atmel和SiLabs电调的图片及参数BLHeliSuite 4w-if interfaces pinout.pdf:Arduino板上用于Atmel/SiLabs电调的BLHeliSuite的4w-if的引脚配置BLHeliSuite 4w-if protocol.pdf:用于Atmel/SiLabs电调的BLHeliSuite的4w-if的通信协议
适配器
首次刷新电调固件
- SiLabs MCUs电调支持以下适配器
- Arduinos:使用
SILABS C2 (4way-if)接口。初次使用Arduinos作为适配器时需要对Arduinos进行编程烧录。 - SiLabs Toolstick:使用
SILABS C2 (Toolstick)接口。 - USB Flashing stick:使用
SILABS C2 (Toolstick)接口。 - BLHeli Skywalker stick:使用
SILABS C2 (Toolstick)接口。
- Arduinos:使用
- Atmel MCUs电调支持以下适配器
- Arduinos:使用
ATMEL ISP Interface (AVRDude)接口。初次使用Arduinos作为适配器时需要对Arduinos进行编程烧录。 - USBasp:使用
ATMEL ISP Interface (AVRDude)接口。
- Arduinos:使用
刷新电调引导程序
- 刷新电调引导程序为BLHeli主要有
USB/Com和4way-if两种类型的接口。 - Arduinos(4way-if):使用
SILABS BLHeli Bootloader (4way-if)或ATMEL BLHeli Bootloader (4way-if)接口。使用Arduinos作为适配器时需要对Arduinos进行编程烧录。 - Arduinos(USB/UART 1-Wire bridge):使用
SILABS BLHeli Bootloader (USB/Com)或ATMEL BLHeli Bootloader (USB/Com)接口。使用Arduinos作为适配器时需要对Arduinos进行编程烧录。 - Favourite stick:使用
SILABS BLHeli Bootloader (USB/Com)或ATMEL BLHeli Bootloader (USB/Com)接口。 - FTDI stick:使用
SILABS BLHeli Bootloader (USB/Com)或ATMEL BLHeli Bootloader (USB/Com)接口。 - Multistar stick:使用
SILABS BLHeli Bootloader (USB/Com)或ATMEL BLHeli Bootloader (USB/Com)接口。
背景说明
- 适配器:Arduino Nano ATMEGA328P
- 电调:主控芯片SIL F330,功率管AON6504,供电1-4S,电流20A-30A,无BEC

操作说明
前期准备
- 下载Arduino Nano所用的USB转串口芯片CH340C的驱动程序CH341SER.ZIP,安装驱动。
- 下载BLHeliSuite,一般下载
BLHeliSuite16714902.zip即可。 - 根据电调外观和信息,查阅手册
BLHeli supported xx ESCs.pdf以确定电调型号。或者根据电调PCB确定电调的主控芯片型号。 - 根据电调的主控芯片型号,查阅手册
BLHeli programming adapters.pdf以确定需要用到的适配器和接口,以及适配器的制作方法。 - 根据所使用的适配器和所需操作使用的接口,查阅手册
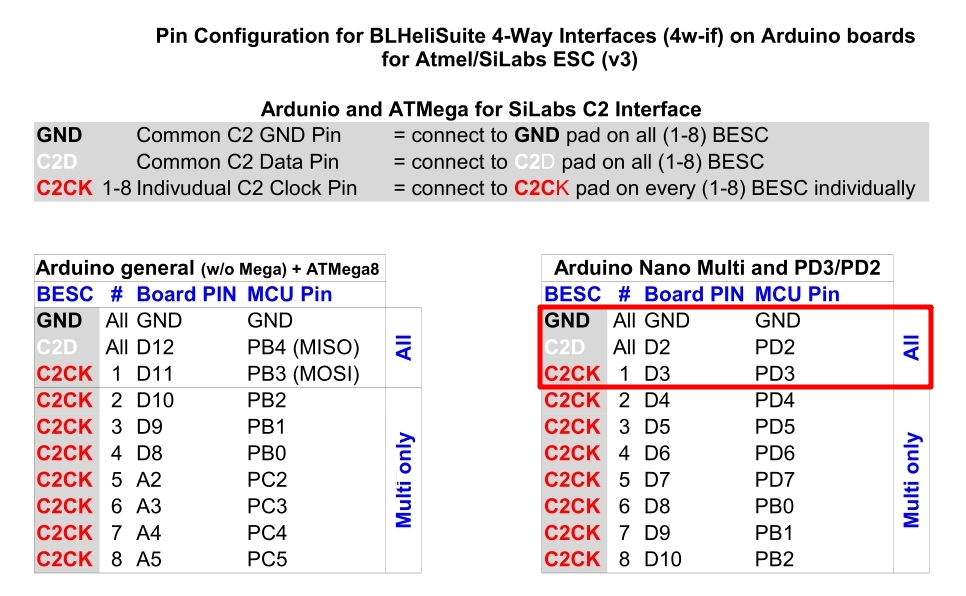
BLHeliSuite 4w-if interfaces pinout.pdf以确定引脚连接。
制作适配器
- 连接适配器和电脑,打开BLHeliSuite。
- 点击Make interfaces标签页。
- 点击Port选择USB-SERIAL CH340 对应的端口,点击Arduino Board选择Nano w/ ATmega328开发板,点击Baud选择115200波特率,点击Arduino 4way-interface。
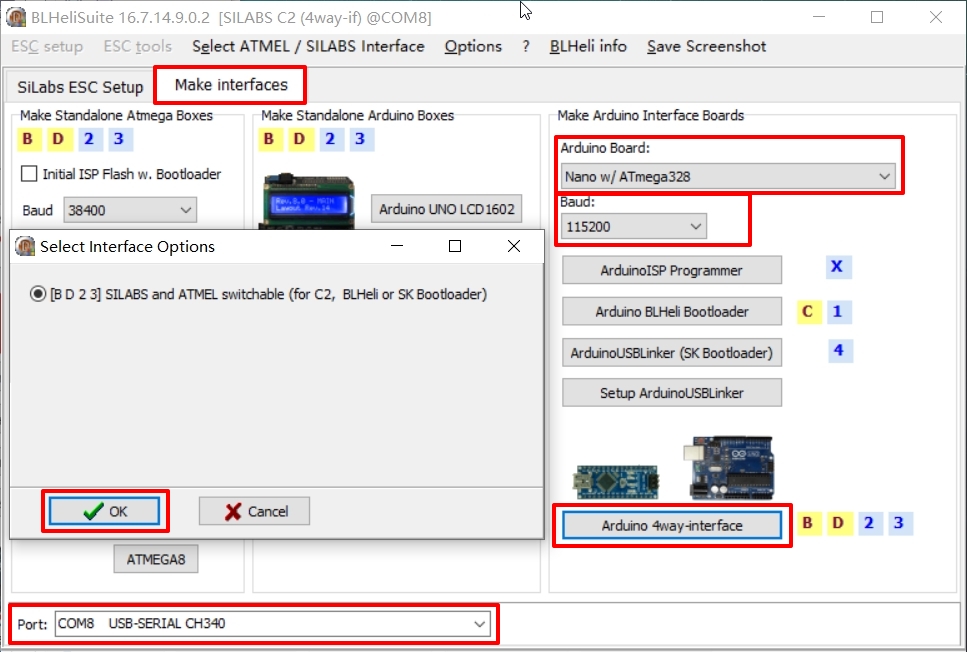
- 点击OK,选择最后一个文件后点击打开。
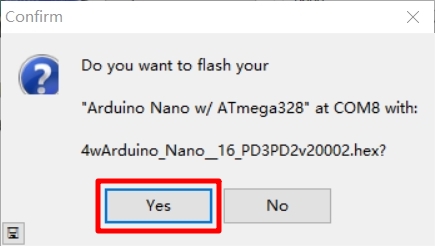
- 点击Yes。
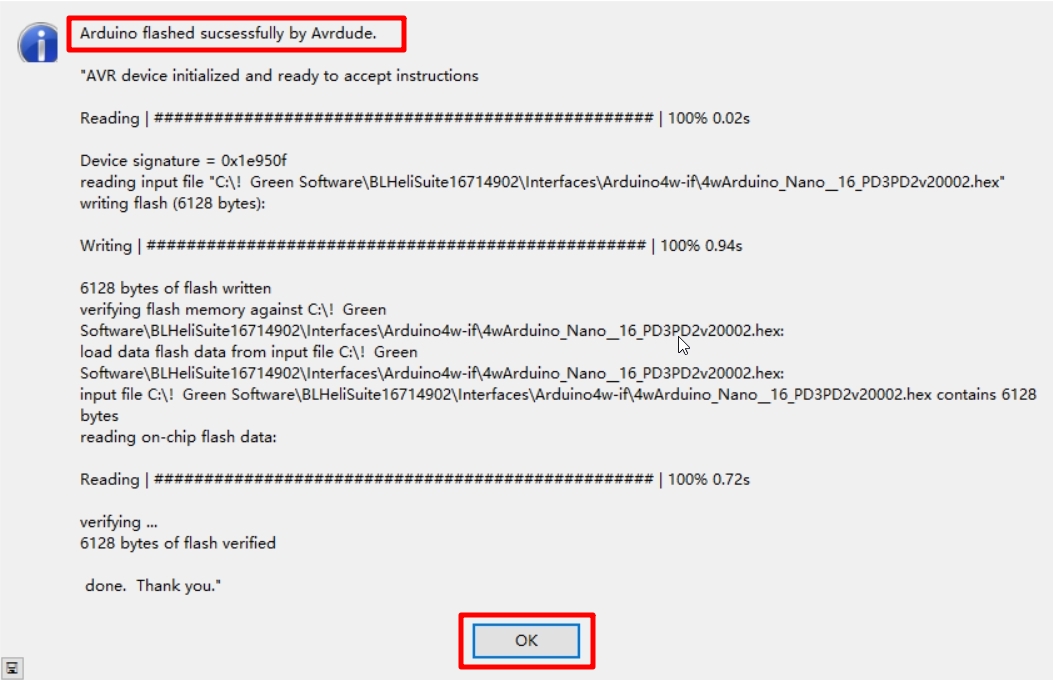
- 等待烧录Arduino,出现Arduino flashed sucsessfully by Avrdude表示已成功将Arduino Nano烧录为适配器。点击OK。
连接电调
- 连接适配器和电调(VCC GND C2D C2CK)。
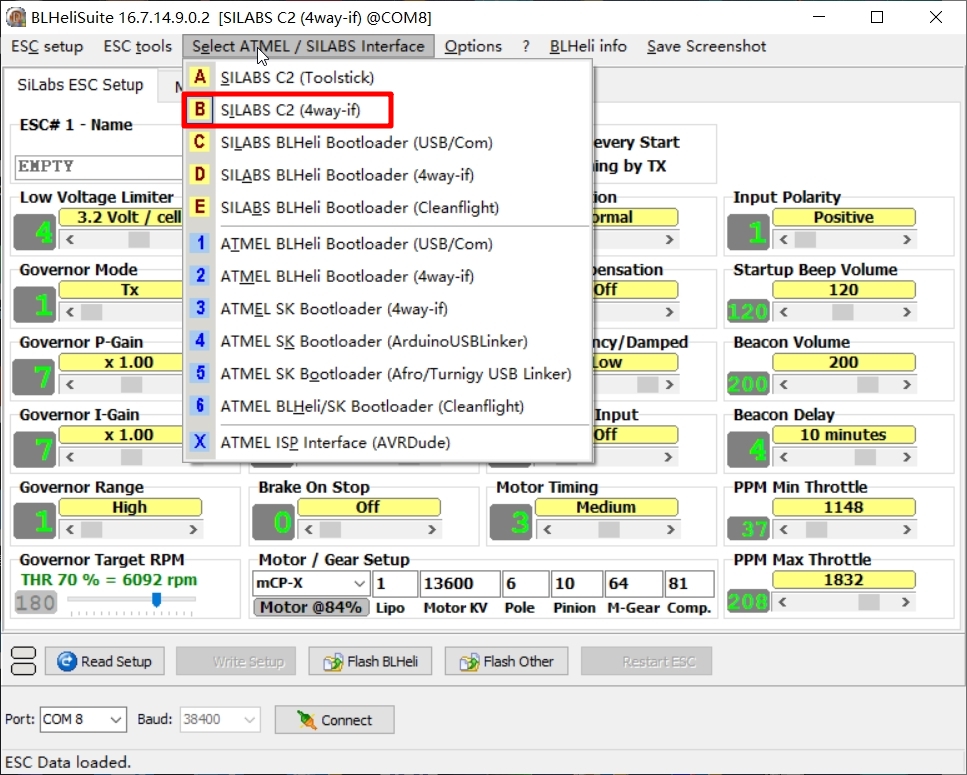
- 点击Select ATMEL/SILABS Interface选择SILABS C2 (4way-if)接口。
- 点击SiLabs ESC Setup标签页。
- 点击Port选择USB-SERIAL CH340 对应的端口,点击connect,点击Read setup读出电调参数设置。
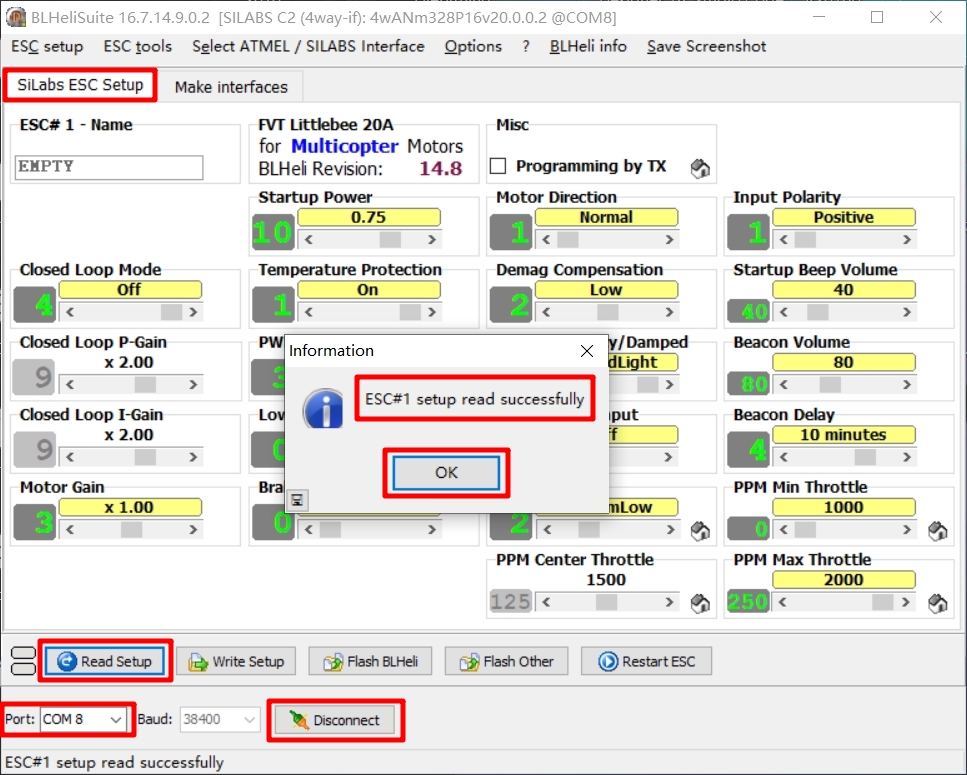
- 出现setup read successfully表示已成功连接到电调并读取到电调的参数。点击OK。
刷新固件
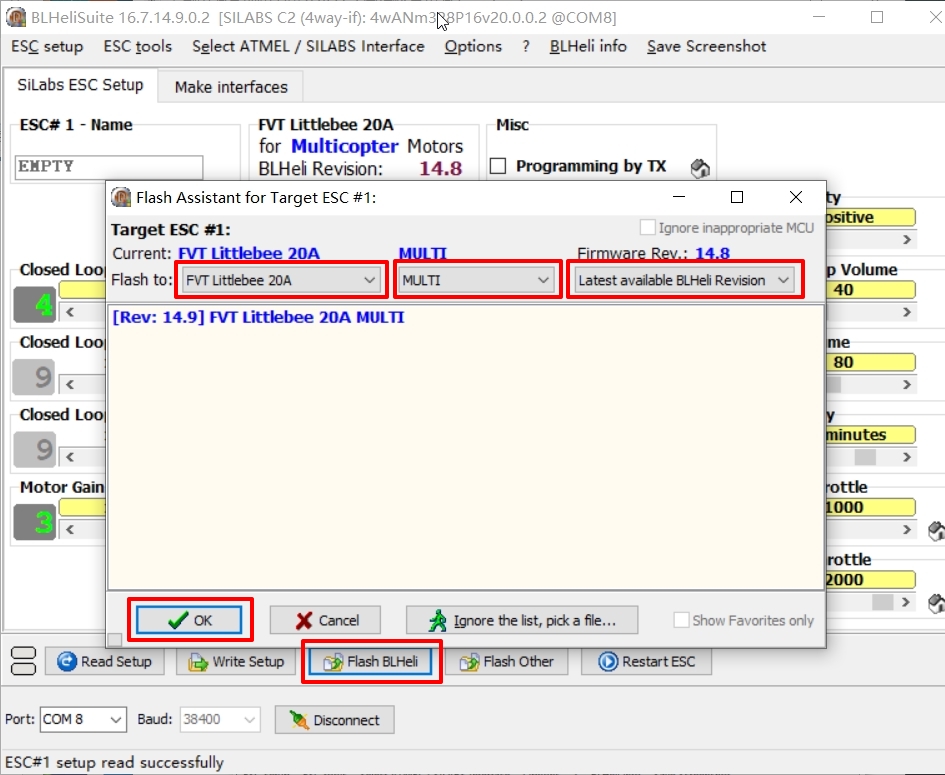
- 点击Flash BLHeli
- 在弹出的窗口中选择固件名称、固件类型(MAIN:直升机主桨;TAIL:直升机尾桨;MULTI:多桨)、固件版本,点击OK。
- 点击Yes。
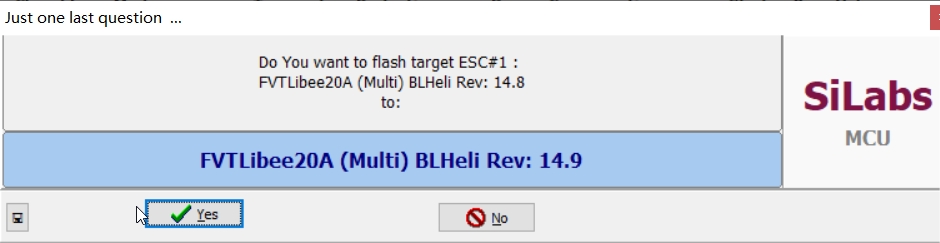
- 等待烧录固件,出现sucsessfully表示已成功将电调固件烧录到电调。点击OK。在下一个弹出的窗口中点击Yes。
调整参数
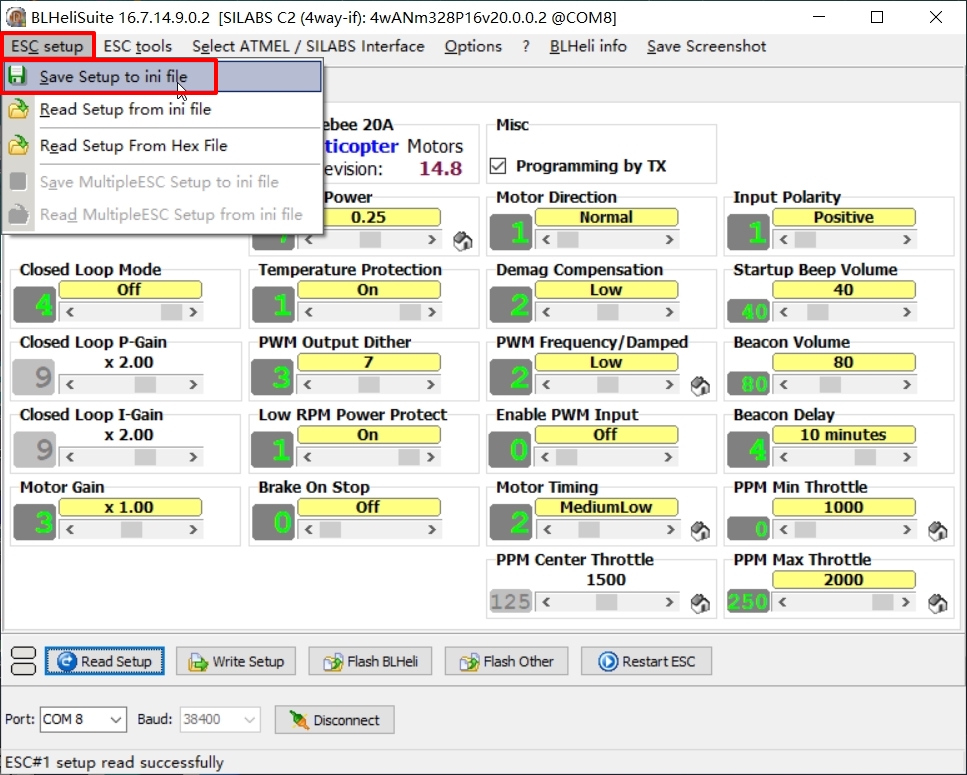
- 点击ESC Setup选择Save Setup to ini file 以备份电调当前的参数。
- 修改电调参数。降低启动功率,降低电调输出的PWM频率,开启低转速功率保护。
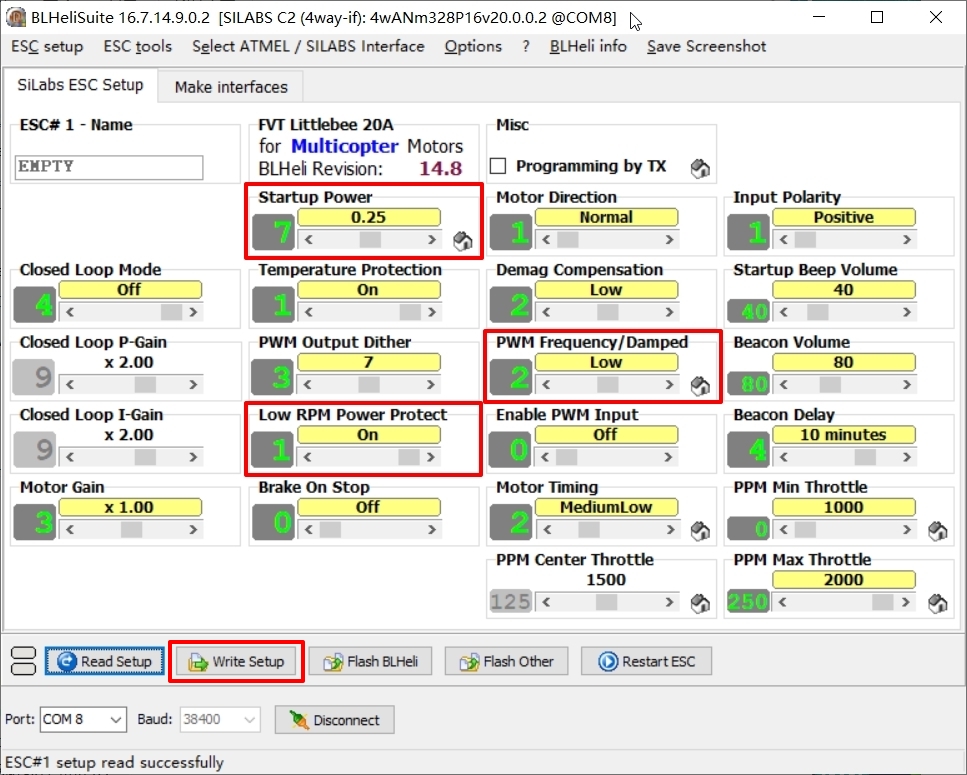
- 点击Write setup将参数写入电调。
-
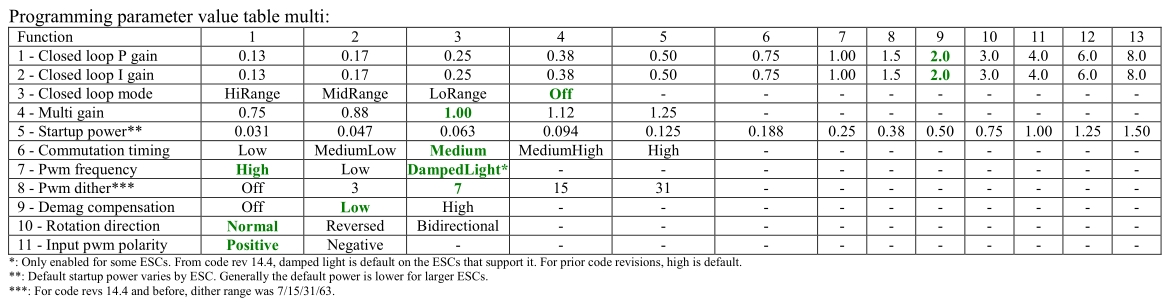
多轴编程参数表
-
电调参数说明,详见官方手册
BLHeli manual xx xx.pdf英文参数 中文参数 参数说明 Startup power 启动功率 启动时允许的最大功率,实际的功率取决于油门的输入。 Motor timing 电机进角 通常设置中进角即适用于大部分电机,但如果电机运转不顺畅时,可以尝试改变进角。 Demag compensation 消磁补偿 防止电机换向后消磁时间过长而引起的电机停转。补偿值越高,保护越好。但补偿值太高,会降低最大功率。 Motor direction 电机转向 在双向模式下,油门中点为零点,中点以上为正转,中点以下为反转。 Startup Beep Volume 蜂鸣器音量 设置正常运行下蜂鸣音量。 Beacon/Signal Volume 信标音量 设置信标的音量。如果零油门信号的时间超过一个设定的时间,电调控制马达发出警报声。以便于找回丢失的飞行器。 Beacon delay 信标延迟 设置信标开始发出之前的延时。 PPM Min throttle;
PPM max throttle;
PPM center throttle最小油门;
最大油门;
中位油门设置电调的油门行程量。中位油门只用于双向模式。正常情况下, 油门信号值在1000us-2000us之间。 对于其他数值输入信号, 则需要做相应比例换算。 Temperature protection 温度保护 温度保护阀值可以设置为80℃-140℃。 Low RPM power protect 低转速功率保护 禁用可以保证低KV电机在低电压运行时实现全功率。但是禁用后会加剧同步丢失的风险,导致烧坏电机。 Brake on stop 停车制动 在通电状态,零油门时会有刹车功能。如果油门没有零点,此项设置无效。 Closed Loop Mode 闭环模式 设置控制环的运行速度范围。在闭环模式下,运行时的油门值对应电机的转速目标。关闭时将禁用控制环。 Closed Loop P-Gain 闭环比例增益 设置转速控制环的比例增益。控制从速度误差到电机功率的增益。 Closed Loop I-Gain 闭环积分增益 设置转速控制环的积分增益。控制从积分速度误差到电机功率的增益。 Motor Gain 电机增益 缩放给定输入施加到电机的功率。仅适用于PWM输入,对PPM输入则无效。会限制电机的最大功率。 PWM Output Dither PWM输出抖动 增加电机PWM关闭周期的长度。减少在PWM频率等于电机换向频率的谐波的转速区域中的问题,并且可以减少达到全油门的步进。不适用于闭环模式。 PWM Frequency/Damped PWM频率/阻尼 设置电调输出的PWM频率。高PWM频率约为20kHz,低PWM频率约为8kHz,轻阻尼模式始终使用高pwm频率。低频率PWM减小了到满功率的步进。轻阻尼模式会增加电机的损耗,从而加快减速速度。 Enable PWM Input 启用PWM输入 如果禁用,则仅接受1-2ms 脉宽的PPM和 OneShot125(125-250us)作为有效输入信号。启用后支持1kHz,2kHz,4kHz,8kHz和12kHz 的PWM输入信号。 Input Polarity 输入极性 用于反转油门。与提供负PWM的接收器一起使用。使用PPM输入时,必须将其设置为正。
注意事项
- 据说电调名称所写的FVT Littlebee 20A并不是真实型号,升级固件可能导致电调烧毁。
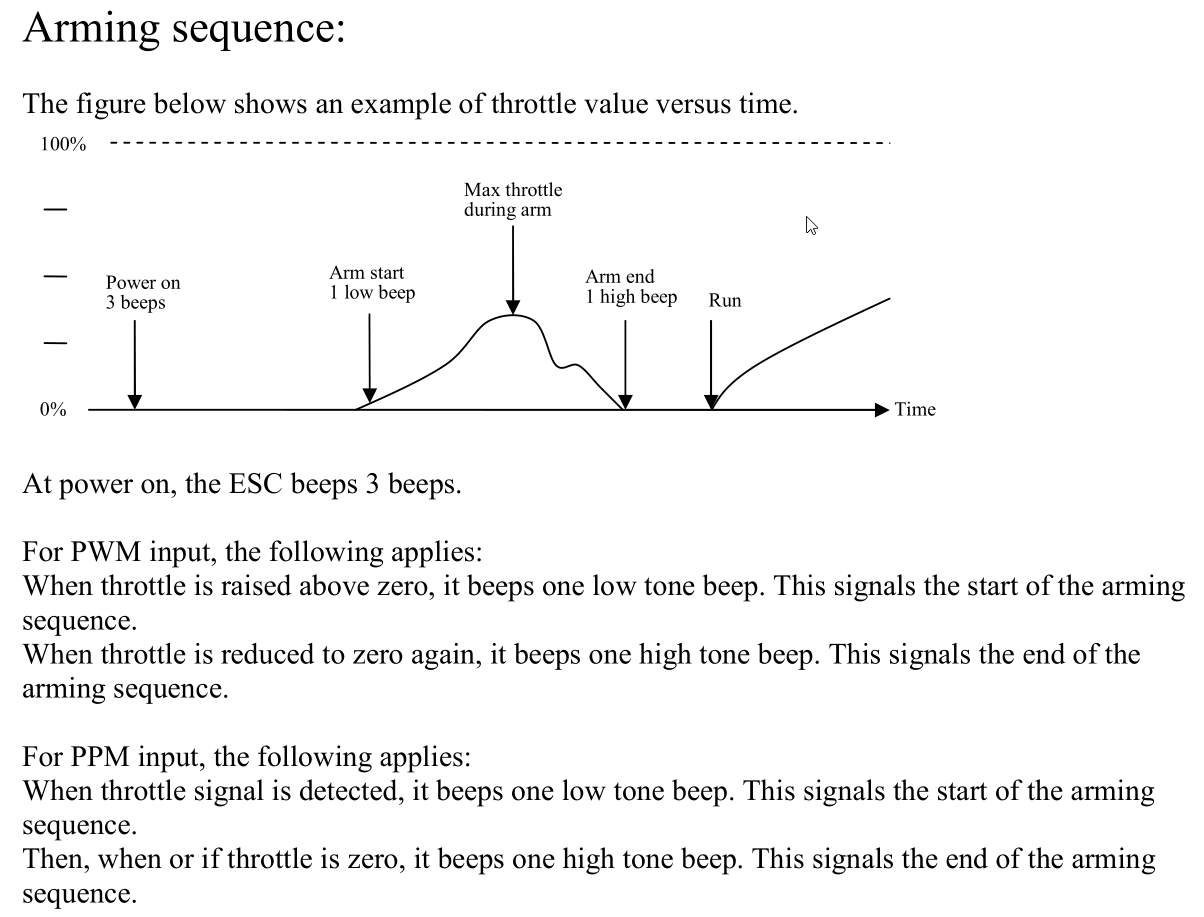
- 电调在驱动电机运转前需要执行解锁序列以进行解锁
- 上电时, 电调发出3声蜂鸣声。
- 当检测到油门信号时, 发出一声低音。 表示解锁信号序列开始。
- 当油门减小到零时, 发出一声高音。 表示解锁信号序列结束。
- SILABS电调接口标号为A、B、C、D,Atmel电调接口标号为1、2、3、4、5、X。通过接口所对应的标号,可以在Make interfaces界面方便快捷的得知需要制作的适配器。
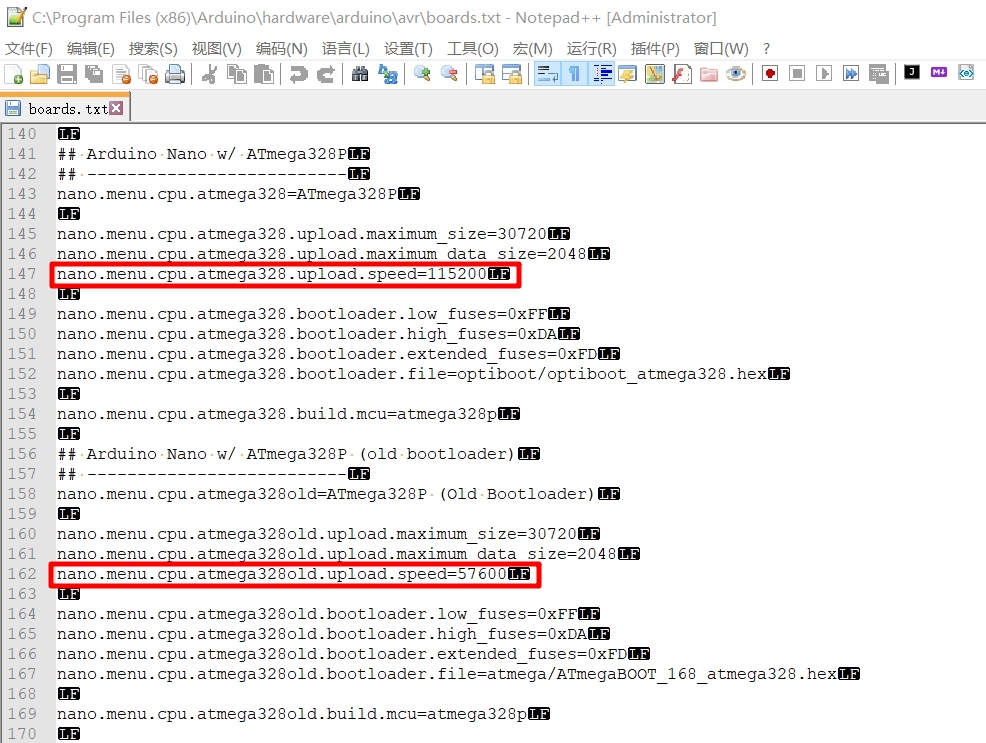
- 在使用Arduino Nano w/ ATmega328P作为适配器时。如果Arduino Nano使用的是旧版的引导程序,波特率设置为57600;如果Arduino Nano使用的是新版的引导程序,波特率设置为115200。
参考资料
- FPV无人机ESC购买指南-Oscar Liang
- ESC固件和协议概述-Oscar Liang
- 直流无刷电机工作原理
- 无刷电机和电子调速器(ESC)是如何工作的
- PPM信号介绍
- Arduino 开发板介绍及对比
- 用arduino uno R3做Blheli编程适配器编程航模电调
- BLHeli无刷电调固件烧写及调参(解决电机低速抖动及正反转)
- BLHeli无刷电调 调参介绍 某宝八元电调
- 懒人免焊接傻瓜包会从零开始给电调刷BLHELI固件
- MTO1804无刷电机引发的悲惨经历之二:电调固件刷新与优化
版权声明:本文为「梦幻之心星」原创,依据 CC BY-NC-SA 4.0 许可证进行授权,转载请附上原文出处链接及本声明。
博客园地址:https://www.cnblogs.com/Sky-seeker
微信公众号:关注微信公众号,获取即时推送
![]()


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· AI与.NET技术实操系列(二):开始使用ML.NET
· 记一次.NET内存居高不下排查解决与启示
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧