

学习日志-2021.09.27
学习日志-2021.09.27
论文阅读:
复杂网络上的合作行为演化研究 ——基于 Q-learning 算法
引言
研究背景
-
演化博弈论:理解合作行为如何在自私个体当中涌现和维持。
- 博弈个体是有限理性的。不能通过一次选择就可以实现策略均衡,而是需要不断地进行策略学习及调整。
- 在符合条件的困境模型背景下,将参与者作为研究对象,并为其赋予固定的策略集。
- 指定初始化条件以后,每轮博弈中所有参与者将与敌手进行策略交互来获取相应的收益,再根据学习规则完成策略的更新。
- 重复上述过程,最终系统中所有博弈个体将会达到某种动态的演化稳定均衡点(非确定的纳什均衡)。
- 博弈个体是有限理性的。不能通过一次选择就可以实现策略均衡,而是需要不断地进行策略学习及调整。
-
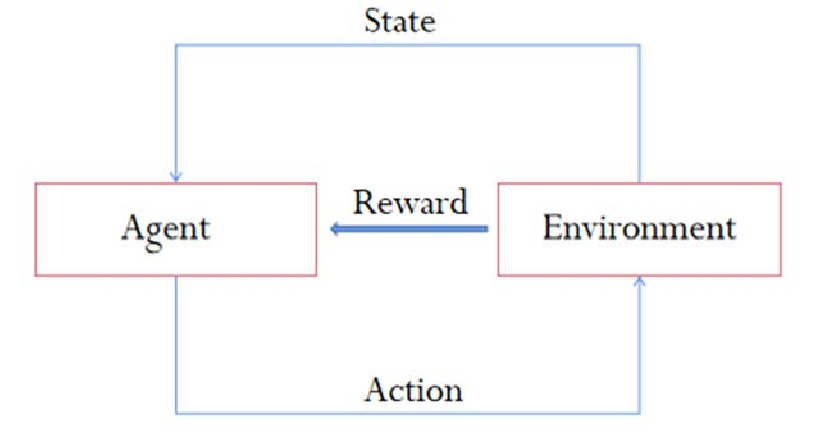
强化学习的基本思想是指智能体在与环境进行交互过程中,通过不断“试错”,逐步优化自己的学习策略,以使目标奖励最大化。
研究意义
- 理论意义
- 加强强化学习算法与演化博弈理论的研究深度,并且,还能够为合作行为的演化带来新的认识。除此之外,亦能够为控制论、生态生物学、心理学以及认知学等其他学科的发展带来相应的启发与思考。
- 现实意义
- 为解决生态、经济和人类社会中合作行为的存在以及维持提供了清晰的理论框架,有助于我们从新的角度去认识和理解生态、经济以及人类社会中的一些合作行为
国内外研究综述
- 复杂网络的发展
- 1992年,Martin A. Nowak 提出在囚徒困境问题的探究中将网络的空间结构引入在内。每个参与者会把自己当轮的收益与零剧中的最高收益作为对比,进而决定是否学习该邻居的策略,可以视为合作或背叛策略从一个结点到另外一个结点的传播。研究发现,空间结构的引入给合作者的幸存提供了条件,合作者可以通过在网络上形成互助的团簇来提高自身的适应度,从而低于背叛者的入侵。
- 1998年,Duncan J. Watts及其导师Steven H. Strogat将高集聚系数和低平均路径长度作为特征,提出瓦茨-斯特罗加茨模型(最经典的小世界网络模型,WS模型)
- 1999年,Albert-Laszlo Barabasi以及Eric Bonabeau发现许多复杂网络的度分布都近似服从幂律分布,在这一基础上引入了无标度网络的概念。
- 除了Well-mixed和网络结构人群中均衡理论的研究外,学者们同样关注于在任何情况下可以消除社会困境带来的不理解过。共演化机制(个人策略和网络拓扑结构的共同进化)亦成为合作问题研究的一个新的突破方向。
- 强化学习方法
- Q-learning算法,是Markov决策过程的一种变化形式,通过利用智能体所经历的动作序列来选择下一步的最优动作。这一算法具有环境无关性,不需要建立环境模型。
-
Minimax Q-learning算法,可应用于两人零和博弈;
-
初始化
-
For iteration do:
-
第
-
得到下一个状态
-
更新
-
利用线性规划求解
-
-
End for
在利用线性规划求解中需要不断求解一个线性规划,这将造成学习速度的降低,增加计算时间。
为了求解
只满足收敛性,不满足合理性。Minimax-Q算法能够找到多智能体强化学习的纳什均衡策略,但是假设对手使用的不是纳什均衡策略,而是一个较差的策略,则当前智能体并不能根据对手的策略学习到一个更优的策略。该算法无法让智能体根据对手的策略来调节优化自己的策略,而只能找到随机博弈的纳什均衡策略。
-
-
Nash Q-learning算法,适用于多人一般和博弈;
-
初始化
-
For iteration do:
-
第
-
得到下一个状态
-
更新
-
利用二次规划求解状态
-
-
End for.
该算法需要观测其他所有智能体的动作
-
-
Friend-or-Foe Q-learning算法,可巧妙地求解多智能体一般和博弈中的纳什均衡解。
-
初始化
-
For iteration do:
-
第
-
得到下一个状态
-
更新
- 利用线性规划求解状态
-
-
End for.
有一种利用Minimax-Q算法进行多人博弈方法为,两队零和博弈,将所有智能体分成两个小组进行零和博弈。两队零和博弈中每一组有一个leader才控制这一队智能体的所有策略,获取的奖励值也是这一个小组的整体奖励值。
FFQ算法没有team learder,每个人选择自己动作学习自己的策略获得自己的奖励值,但是为了更新
FFQ与Minimax-Q算法一样都需要利用线性规划,因此算法整体学习速度会变慢。
-
-
- Q-learning算法,是Markov决策过程的一种变化形式,通过利用智能体所经历的动作序列来选择下一步的最优动作。这一算法具有环境无关性,不需要建立环境模型。
预备知识
困境模型
经典博弈论包含三个基本要素:参与者、策略集、收益。
在经典博弈论的研究中,参与者将遵循“理性人”假设,他们将以个人利益最大化为目标,根据计算与判断理智地做出决策。这样一来,往往会导致个人最佳选择与集体最佳选择恰好相反。
-
囚徒困境模型
-
公共物品博弈模型
(以上模型已经了解过,故不再详细记录)
演化博弈论
经典博弈论:个体是完全理性的(所有个体都知道其他人是理性的,每个人都选择采取纳什均衡状态下个人的最优策略)
演化博弈论:博弈参与者是有限理性的
-
重要概念:进化稳定策略——指的是当一个种群中的绝大多数个图都选择了该策略时,即使有一小部分群体突发选择了其他策略,它们依然无法入侵到该种群之中去。
-
复制动力学方程的核心思想:适应度越大的个体,其繁殖能力越强。
-
形式:
-
-
-
-
当
当
-
-
基于复杂网络的博弈演化
-
研究基本思路
-
确定博弈模型(囚徒困境、公共物品博弈等)
-
确定网络结构(规则格子网络、随机网络、小世界网络等)
-
确定参与个体的策略更新方式。产检规则一般有如下:
-
学习最优者:将自己与邻居前一回合的收益对比。直接学习收益最高的个体(包括自身)对应的策略。
-
模仿优胜者:每轮博弈中,当中心个体
-
概率更新。最常见的时费米更新规则,即根据更加符合有限理性假设的学习方式更新器策略,学习概率如下:
其中,
-
-
进行复杂网络上的演化博弈
-
强化学习算法
-
机器学习按照学习方式进行分类,可以分为:监督学习、非监督学习和强化学习三种。
与监督学习和非监督学习相比,强化学习无需依赖大规模的已有数据集(智能体在与环境进行交互的过程中,通过不断接收到的反馈信息来逐步调整自己的动作,以达到最优的状态)。
-
马尔可夫决策(MDP)
-
MDP可用元组来表示
-
相关数学表达式:
-
期望奖励函数
-
转移概率函数
-
行为策略
则状态转移概率函数和奖励函数可以重新定义为:
当一个策略
它遵循Bellman最有方程:
-
-
Q-learning算法
算法描述参考上一篇博客
- Q-learning算法的几个特点
- 一种探索加利用的学习方式,对先验知识不做要求或有较少的要求;
- 采用增量的方法,是在线的学习方式;
- 适用于在不确定的环境中学习;
- 算法的体系结构可扩展;
- 是收敛的算法。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 如何编写易于单元测试的代码
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 周边上新:园子的第一款马克杯温暖上架
· Open-Sora 2.0 重磅开源!
· 分享 3 个 .NET 开源的文件压缩处理库,助力快速实现文件压缩解压功能!
· Ollama——大语言模型本地部署的极速利器
· [AI/GPT/综述] AI Agent的设计模式综述