文献解读:风电机组功率、噪声与大气稳定性的关系
 风电机组功率、噪声与大气稳定性的关系,针对大型风电机组,通过在轮毂高度测量的风速与在标准大气中预期的风速的比较来证明大气稳定性对风切变有显著影响,相对于中性大气,大气稳定性大大增加了发电量。由于大气稳定性导致的风切变的增加也对声发射产生了显著影响,使其大大高于近地风速和中性大气的预测,从而对邻近居民造成更大的噪声影响,并提出了减轻噪声影响的措施。
风电机组功率、噪声与大气稳定性的关系,针对大型风电机组,通过在轮毂高度测量的风速与在标准大气中预期的风速的比较来证明大气稳定性对风切变有显著影响,相对于中性大气,大气稳定性大大增加了发电量。由于大气稳定性导致的风切变的增加也对声发射产生了显著影响,使其大大高于近地风速和中性大气的预测,从而对邻近居民造成更大的噪声影响,并提出了减轻噪声影响的措施。
题目:风电机组功率、噪声与大气稳定性的关系
关键词:风力发电;噪声;大气稳定性;风速剖面;声音波动;
1 中文摘要
针对大型风电机组,可以通过在轮毂高度测量的风速与在标准大气中预期的风速的比较来证明大气稳定性对风切变有显著影响,相对于中性大气,大气稳定性大大增加了发电量。由于大气稳定性导致的风切变的增加也对声发射产生了显著影响,使其大大高于近地风速和中性大气的预测,从而对邻近居民造成更大的噪声影响。本文提出了减轻噪声影响的措施,如(1)可以用近地风速或声级作为控制输入来控制转速;(2)不断调整旋转叶片的桨距角度来减少声音的波动(“撞击声”);(3)加入俯仰角的随机变化,模拟白天大规模湍流波动的影响来防止夜间由于多台风电机组的颠簸重合而产生更强的波动。
2 关键信息提取
2.1 大气稳定性对噪声的影响
通常,轮毂高度可用的风能是根据其他高度的风速计算得到的。与风能有关的对数风廓线的修改常常被忽视,理由是低风速范围相对不重要。近年来,随着风电机组高度的增加,大气稳定性作为风能的决定因素倍受关注。
为了研究大气稳定性对风的影响,进而对发电量和噪声的影响,由荷兰皇家气象研究所的Bosveld博士提供了位于荷兰西部Cabauw的气象研究站的数据。通过气象研究站的数据,研究分析了风速切变、切变和地面热通量、风向切变、稳定性的普遍性等问题。
将Cabauw气象站的数据应用于Vestas V80-2MW风电机组,可以研究大气稳定性对风电机组功率和噪声的影响。由制造商提供最高(105.1 dB(A))和最低(100.1 dB(A))声功率曲线的数据。
全年平均值在图9的右侧用大符号表示:根据实测风速计算为598kW,根据外推风速计算为495kW。这相当于年可利用率别为30%和25%。
风电机组在声功率最低101·0 dB(A)时机组运行时的功率,其中最适合功率曲线(最小和最大功率之间)年平均发电量为569kW,相当于28%的年负荷系数。
4dB的声级差意味着每年的发电量减少了6%。
为了计算声功率级LW与轮毂高度风速V80的函数,将105·1 dB(A)声功率级曲线近似为四次多项式:

使用实际和对数外推(从10米)风速绘制了每个时钟小时的结果,如图10。
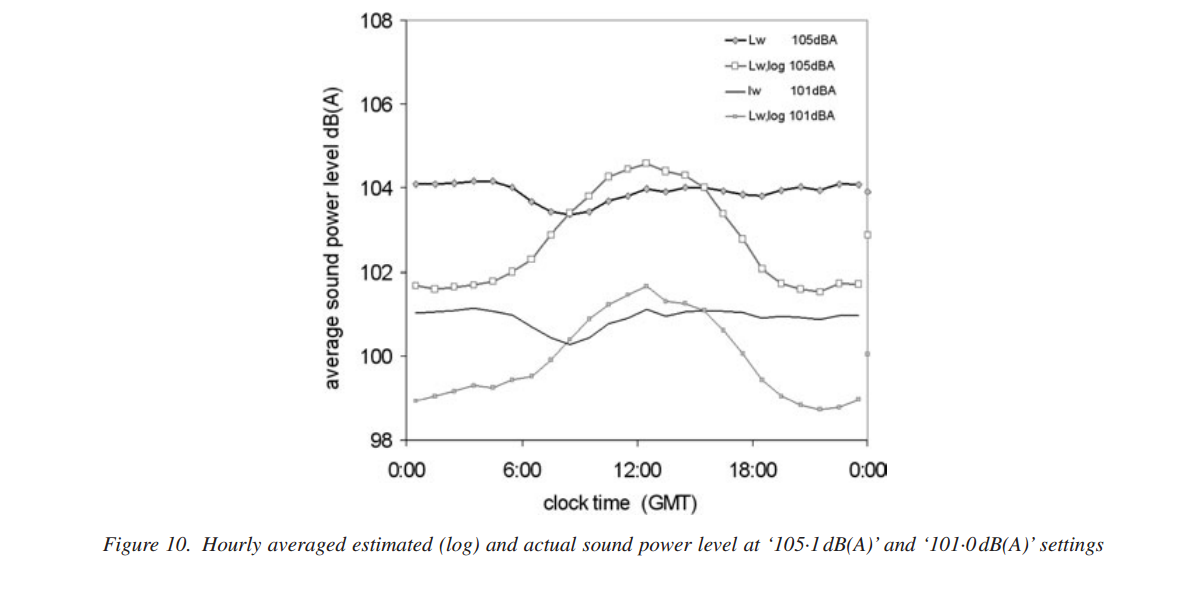
在1987年的平均值中,白天的声功率级被高估了0.5dB,夜晚的声功率级被低估了2dB。
声功率级为101·0 dB(A)时,最佳的四次多项式拟合(4 < V80 < 12 m/s)为:

对比4 < V80 < 12m/s、V80 > 12m/s,LW,hp = 105dB(A) 和 6 < V80 < 12 m/s,LW,hp = 101dB(A)时,声功率级比相同风速下的高功率设置平均低3dB。
2.2 降噪措施
为处理风电机组由于增加大气稳定性而产生的“附加”声音。探讨两类缓解措施:将声级降低到环境噪音的相关(法定)限制;减少由于叶片嗖嗖/重击造成的声级变化。
2.2.1 控制声级排放
将声排放级被限制在一个取决于10米风速或环境声级的值(应该取决于强风下的10米风速)。风电机组在轮毂高度风速下运行,但必须由10米的风速控制。为了降低给定风轮的声级,可以降低旋转速度。这意味着风电机组的效率较低,考虑到噪声的产生,需找到一个最优方案。
2.2.2 减少声级波动
当大气变得稳定时,由于叶片的攻角发生变化,在旋转过程中,叶片后缘的湍流层厚度会发生变化,特别是当叶片经过桅杆时,由于桅杆的存在,风速仍然较低,从而产生波动声。在风力发电场中,两个或多个机组产生的增加的脉动变化可能同时发生,从而产生更高的波动。
(1)调节桨距角
当叶片在垂直平面上旋转时,最佳桨距角由风速与叶片转速之比决定。转速是径向距离(从轮毂)的函数,叶片节距随叶片长度而变化,并且在叶尖处最低。离地面较近的风速通常较低,如果桨距保持不变,攻角在一个旋转内会发生变化。对于H=100m,D=70m,R=20rpm的风电机组,这种变化(相对于轮毂高度)在不稳定的大气中约为0.5°,在非常稳定的大气中增加到近2°。在塔前面的攻角会有进一步的变化(大约2°)。在高尖端,迎角变化在- 0.3°(不稳定)到-1.7°(非常稳定)之间。
通过调整桨叶角度以适应当地的风速,可以在旋转叶片的各个位置实现最佳的进风攻角。当桨叶向上运动时,桨距增大,当桨叶向下运动时,桨距减小。这种桨距的连续变化在直升机技术中是常见的。如果迎角的变化可以减少到1°或更小,叶片嗖嗖声将有小于2dB的变化。
(2)改变风轮俯仰角
如果风轮向后倾斜,则叶片元件在向下冲程时向前移动,在向上冲程时向后移动,从而在风的方向上具有变化的速度分量。当叶片旋转时,迎角会发生变化,因为气流角取决于叶片的位置。从几何角度考虑,倾斜角必须非常大,才能产生近似恒定的迎角:当倾斜角超过20°时,风轮倾斜角可以补偿低尖端1°的迎角变化。
如此大幅度的倾斜具有一定缺点,因为它减少了与风垂直的风轮面,并诱导了平行于风轮面的流动分量(再次改变了流入角)。因此,增加倾斜度似乎不是减少波动水平的有效方法。
(3)风电机组不同步
当大气变得稳定时,大尺度湍流变得更弱,风速在更远的距离上更加连贯。风电场中的不同机组暴露在变化较小的风中,并且机组的近同步可能导致两个或更多机组的叶片节拍在风电场附近的观察者中重合,从而产生更高的脉冲水平。为了使涡轮机在这种情况下不同步,可以通过单独模拟每个机组机叶片俯俯角的小而随机的波动来模拟大气湍流引起的随机变化。
3 结论
(1)各向陆区白天低层大气边界层切变指数为0.1 ~ 0.2,对应的风速比V80/V10为1.25 ~ 1.5。相关的风廓线与低粗糙度(低植被)对数风廓线预测的风廓线相当。在夜间,剪切指数的变化范围更大,可达1,更多的是在0.25 ~ 0.7之间,这意味着V80/V10的比值在1.7 ~ 4.3之间变化。故高空风速比10米风速的对数外推所期望的要高得多。
(2)夜间的高风切变是非常常见的,必须被视为温带和陆地夜间大气的标准特征。事实上,大气层只有一小部分时间是中性的:在强风和/或重云的时候。其余部分要么是稳定的(太阳下山),要么是不稳定的(太阳升起)。
(3)就风电机组而言,对夜间高海拔风速的低估已经被白天高海拔风速的高估所补偿。这可能部分解释了为什么大气稳定性不被认为是风电机组的一个重要决定因素,而是被视为一个“小扰动”。为了评估风电机组的功率和噪声,应该放弃使用中性风廓线,它产生的数据与现实不一致。
(4)在现有的风电机组中,可以通过降低风轮的转速来降低声发射。当噪声限制是单个最大声排放水平时,这实际上规定了给定机组的最小距离,并且没有进一步的法律义务来控制。其他情况下,控制策略将取决于法律强制限制是来自10米风速还是环境背景声级相关限制。以10米风速或背景声级作为控制系统输入,桨距或转子转速为被控参数。在这两种情况下,必须选择一个合适的地方来测量输入参数。对于背景声级作为输入,可能需要使用两个或多个输入,以尽量减少本地(近麦克风)声音的影响。在相对安静的地区,这可能是最好的策略,因为它控制着一个重要的影响参数:高于背景或风电机组声音的侵入性水平。
(5)夜间风电机组噪声的一个明显特征是它的砰砰声。即使声发射水平没有改变,也可以通过消除由于叶片经过塔而产生的节奏来减少烦恼。同样,较低的转速将有助于降低整体水平,包括脉冲水平。一个更好的解决方案是不断改变桨距,在每次旋转中根据当地情况调整攻角。从能量的角度来看,这也是一个优势,因为它优化了每个风轮角度的升力,并且它将减少伴随声脉冲的叶片上的额外机械负荷。
(6)当声音的脉冲特性由于风电场中几个风电机组的声音相互作用而增强时,可以通过在叶片桨叶上添加小的随机变化来消除这种变化,模仿不稳定大气中湍流施加的随机变化。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号