3 矩阵的相似标准形
本章目的
- 对给定的矩阵,(在找不到相似对角阵的情况下)找一个最简单的矩阵与之相似。
- 对给定的线性空间上的线性变换,找线性空间的一组基,使得线性变换的矩阵最简单。
特征值与特征向量
- 回顾:矩阵的特征值、特征向量主要通过特征多项式求根进行计算,即本质上是求\((\lambda_0I-A)x=\theta\)的非零解,进而等价为求\(|\lambda_0I-A|=0\)的特征多项式的根。
- 若两个矩阵是相似的,则它们的特征多项式相同。
注:1. 定理的逆命题不成立;2. 可定义线性变换的特征多项式。
主子式
与普通的子式不同的是,主子式在取某行的同时也要取某列。但又不同于顺序主子式只能从左上角开始。
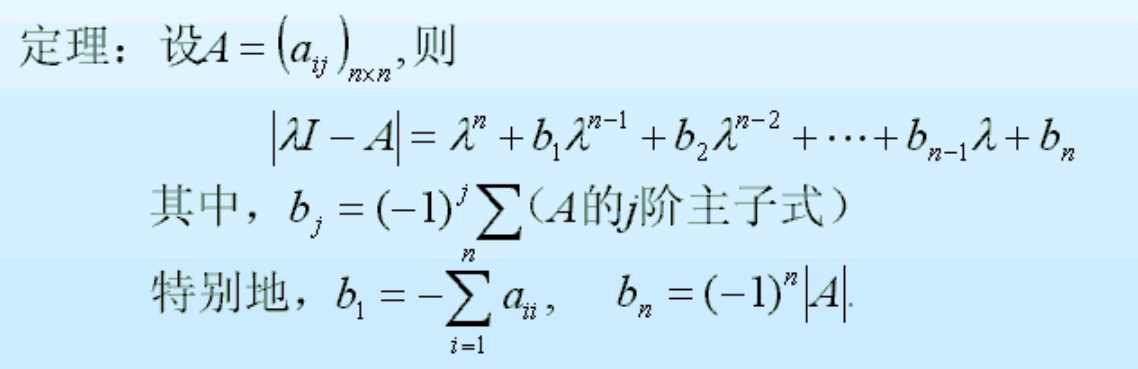
\(b_1=tr(A),b_n=det(A)\)
矩阵的迹
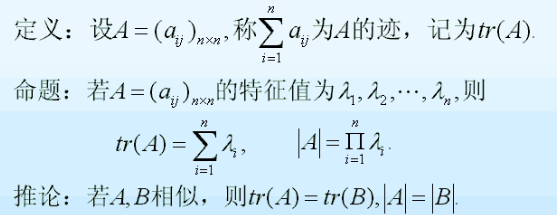
迹=主对角线的和=特征值的和。
- 一个常用的结论:tr(AB)=tr(BA),利用这个有时候可以在求迹的时候,把一个矩阵转换为一个数。
化零多项式
- 设\(f(x)\)是多项式。若\(f(A)=O\),则\(A\)的特征值均是\(f(x)=0\)的根。则此\(f(x)\)为化零多项式。
注:化零多项式的根并不一定是\(A\)的特征值。
- 在不知道特征多项式的情况下,使用化零多项式也可以解决求特征值的问题。
例:已知\(A^2=A\),证明:\(A\)的特征值只能是0或1(这里的\(A\)又被叫做幂等阵)
解:令\(f(x)=x^2-x\),则\(f(A)=A^2-A=O\)
\(A\)的特征值是\(f(x)\)的根:0,1。
但无法求出是几重根以及确定具体是0还是1。
最小多项式
矩阵\(A\)的次数最低的、最高次项系数为一的化零多项式称为\(A\)的最小多项式
于是有了次数逐渐降低的一个多项式的变化过程:特征多项式 → 化零多项式 → 最小多项式
- 例:
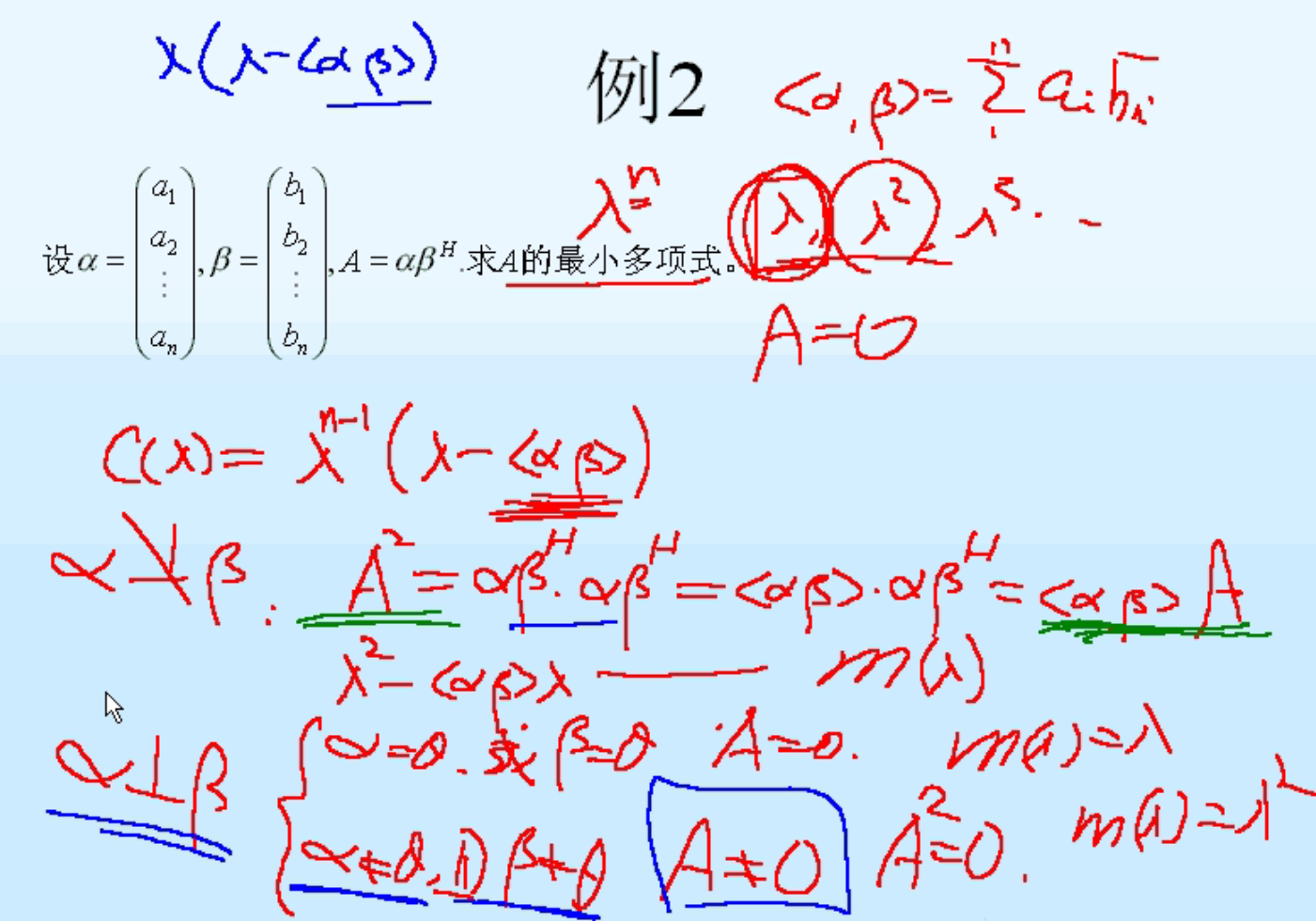
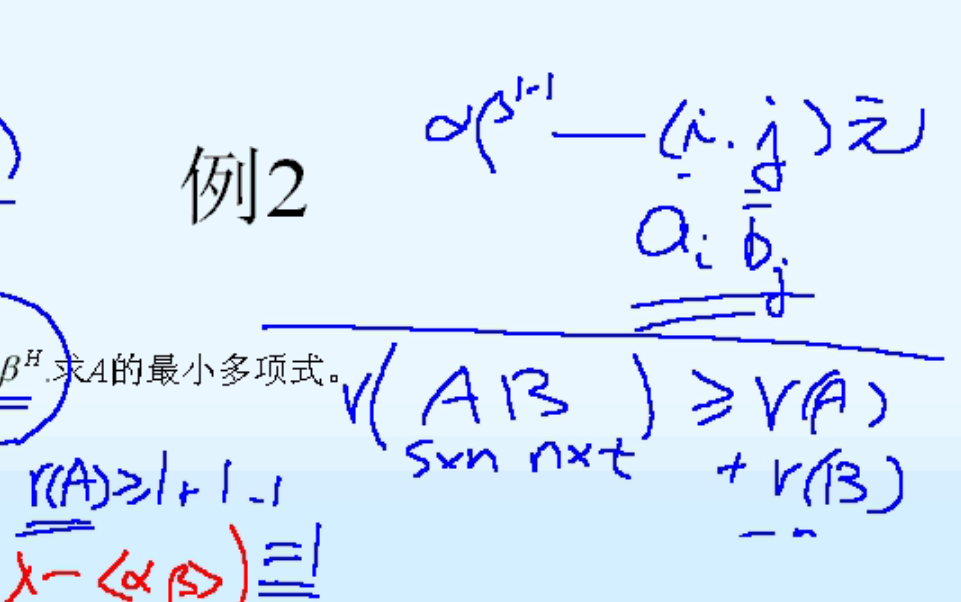
第二张图是为了补充说明:\(\alpha \neq 0,\beta \neq 0\),则\(A=\alpha \beta^H \neq O\)(防止有零因子的现象出现)。
多项式相关性质
- 方阵\(A\)的最小多项式必整除\(A\)的化零多项式和特征多项式。
- 矩阵\(A\)的最小多项式是唯一的。
- 矩阵\(A\)的特征值一定是最小多项式的根。特别地,若矩阵\(A\)的特征值互异,则它的最小多项式与特征多项式相同。
- 方阵\(A\)的最小多项式与特征多项式有相同的零点。
- 相似的矩阵有相同的最小多项式。
Hamilton-Cayley定理
设\(A∈F^{n*n},C(\lambda)=|\lambda I-A|\),则\(C(A)=O\)
书中引用Schur引理证明了该定理。而该定理是为了证明化零多项式是一定存在的。
Schur引理
对\(\forall A∈C^{n*n}\),存在酉矩阵\(U\)使得\(U^HAU\)是上三角矩阵。(即酉相似)
相似对角化的充要条件
目的
- 对给定的矩阵,判断其是否相似于对角阵
- 对给定的线性空间上的线性变换,判断是否存在空间的一组基,使得其矩阵是对角阵。
已知的判别方法
- \(n*n\)的矩阵\(A\)相似于对角阵\(\leftrightarrows A\)有\(n\)个线性无关的特征向量
- 矩阵的属于不同特征值的特征向量线性无关
- 各个特征值中线性无关的特征向量也都线性无关。
线性变化下的判别方法
- \(f\)可对角化\(\leftrightarrows f\)有\(n\)个线性无关的特征向量。
- \(f\)的属于不同特征值的特征向量线性无关。
- 各个特征值中线性无关的特征向量也都线性无关。
特征子空间
- 设\(f∈Hom(V,V)\),\(\lambda_0\)为\(f\)的特征值,称\(V_{\lambda_0}=\left\{\zeta|f(\zeta)=\lambda_0\zeta,\zeta∈V\right\}\)为\(f\)的特征子空间(相应于\(\lambda_0\))。
不难看出\(V_{\lambda_0}\)正是由相应于特征值\(\lambda_0 \)的全体特征向量再添上一个零向量构成。\(f\)的\(V_{\lambda_0}\)是线性变换\(f-\lambda_0I\)的核,它是\(f\)的不变子空间。
- \(dimV_{\lambda_0}\)=\(f\)的属于\(\lambda_0\)的线性无关特征向量个数
- 设\(f\)的特征多项式是\(C(\lambda)=\prod \limits_{i=1}^s(\lambda-\lambda_i)^{r_i}\),则\(dimV_{\lambda_i}≤r_i\)(即,几何重数≤代数重数)
- 设\(f\)的特征多项式是\(C(\lambda)=\prod \limits_{i=1}^s(\lambda-\lambda_i)^{r_i}\),则下述条件是等价的:
- \(f\)是可对角化的
- \(\forall i,dimV_{\lambda_i}=r_i\)(对应特征子空间的维数与它的根的重数相等)
- \(V=V_{\lambda_1}\oplus V_{\lambda_2}\oplus…\oplus V_{\lambda_i}\)
可相似对角化的充要条件
- \(n*n\)矩阵\(A\)相似于对角阵\(\leftrightarrows A\)的最小多项式无重根
引理:若\(n\)阶矩阵\(M_i\)满足\(M_1M_2···M_s=O\),则\(\sum \limits_{i=1}^sr(M_i)≤(s-1)n\)
常用结论:若化零多项式无重根,则最小多项式也无重根。
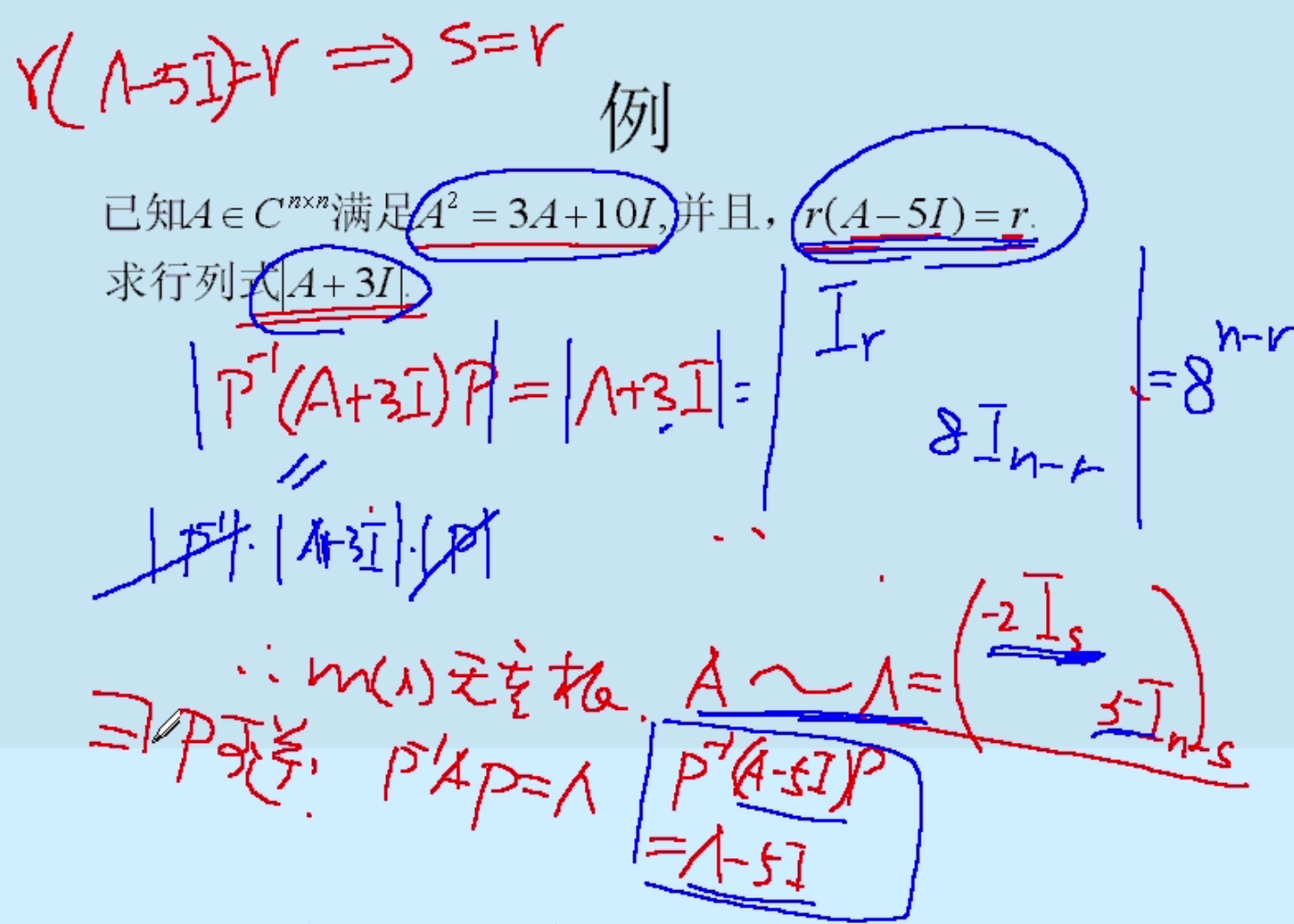
- 例:
Jordan标准形
问题
- 如果给定的矩阵不与任何对角阵相似,如何找一最简单的矩阵与之相似。
- 等价的问题:若线性空间上给定的线性变换不可对角化,如何找线性空间的一组基,使得线性变换的矩阵最简单。
定义
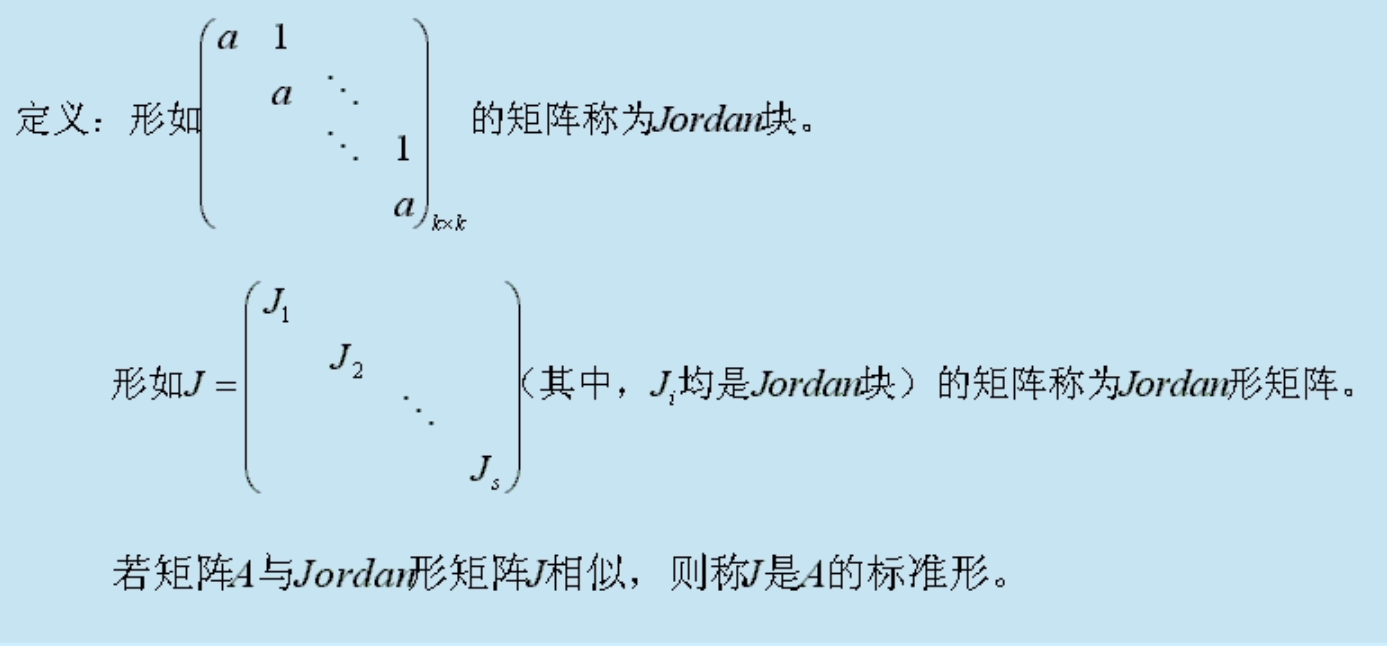
注:Jordan块的主对角线元素必须相同。
对角阵是特殊的Jordan形矩阵。
Jordan标准形的存在性、唯一性
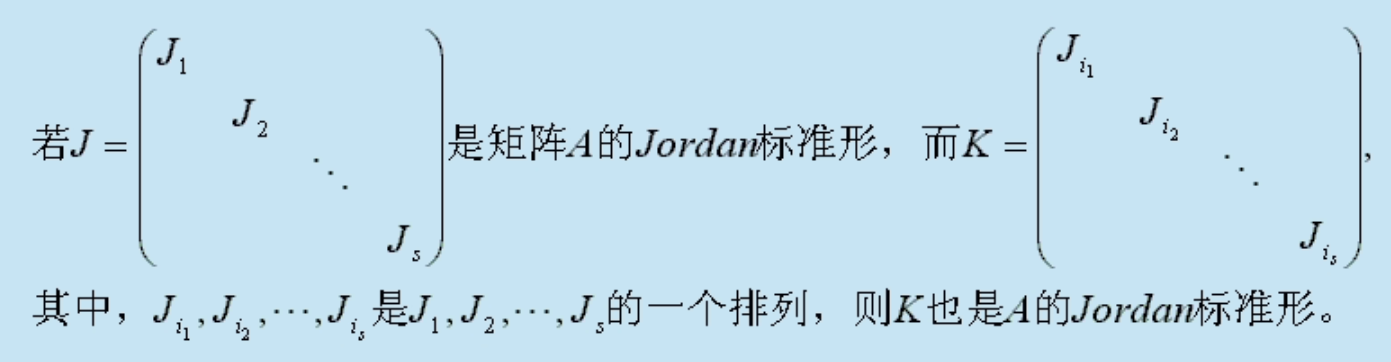
除了相差Jordan块的次序外,矩阵的Jordan标准型是存在的、唯一的。
- 在求解Jordan标准形时,只换了Jordan块次序的情况不被认为是一个新的Jordan标准形。
- 同时,还需要借助秩的方式来进行判断,如果\(J\)是矩阵\(A\)的Jordan标准形,则\(r(A-I)=r(J-I)\)
也就是说不用刻意去背Jordan标准形唯一性定理,因为很少直接用到。
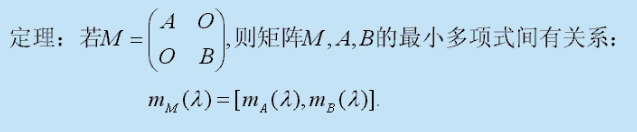
分块矩阵的最小多项式:
Jordan标准形与最小多项式

特征多项式确定Jordan标准形的对角线元素,最小多项式通过重数确定对应Jordan块的最高阶数(且至少含有一块最高阶数的Jordan块)。
引理
设\(f\)为线性空间\(V\)的线性变换,若存在互素多项式\(p(x)\)与\(q(x)\),使\(p(f)q(f)=0\),则\(V=W\oplus S\),其中
且\(W\)与\(S\)都是\(f\)的不变子空间。
特征值的分布
通俗的讲\(R_i\)就是去掉该对角线元素后的,其余元素的绝对值的和。n阶矩阵若有n个特征值,则有n个盖尔圆(但并不是每个盖尔圆中都一个特征值)。
- 矩阵\(A\)的特征值必定在\(A\)的盖尔圆系中。
- \(A\)的盖尔圆系\(G\)中,记由\(k\)个圆组成的连通域为\(G_k\),又\(G_k\)与\(G\)中其他圆无公共点,则称\(G_k\)为\(k\)区。
- \(A\)的盖尔圆的\(k\)区,有且仅有\(A\)的\(k\)个特征值。
- 推论:如果\(A\)的\(n\)个盖尔圆互不相交,则\(A\)有\(n\)个互不相等的特征值。
- 推论:若矩阵\(A\)的盖尔圆都是1区,则\(A\)可相似于对角阵。
以上可以用来估计特征值的范围,在不求出具体特征值的情况下确定矩阵可相似于对角阵。
在解题过程中,也可以借助转置矩阵来确定不同的盖尔圆(但对应的特征值是一样的)。
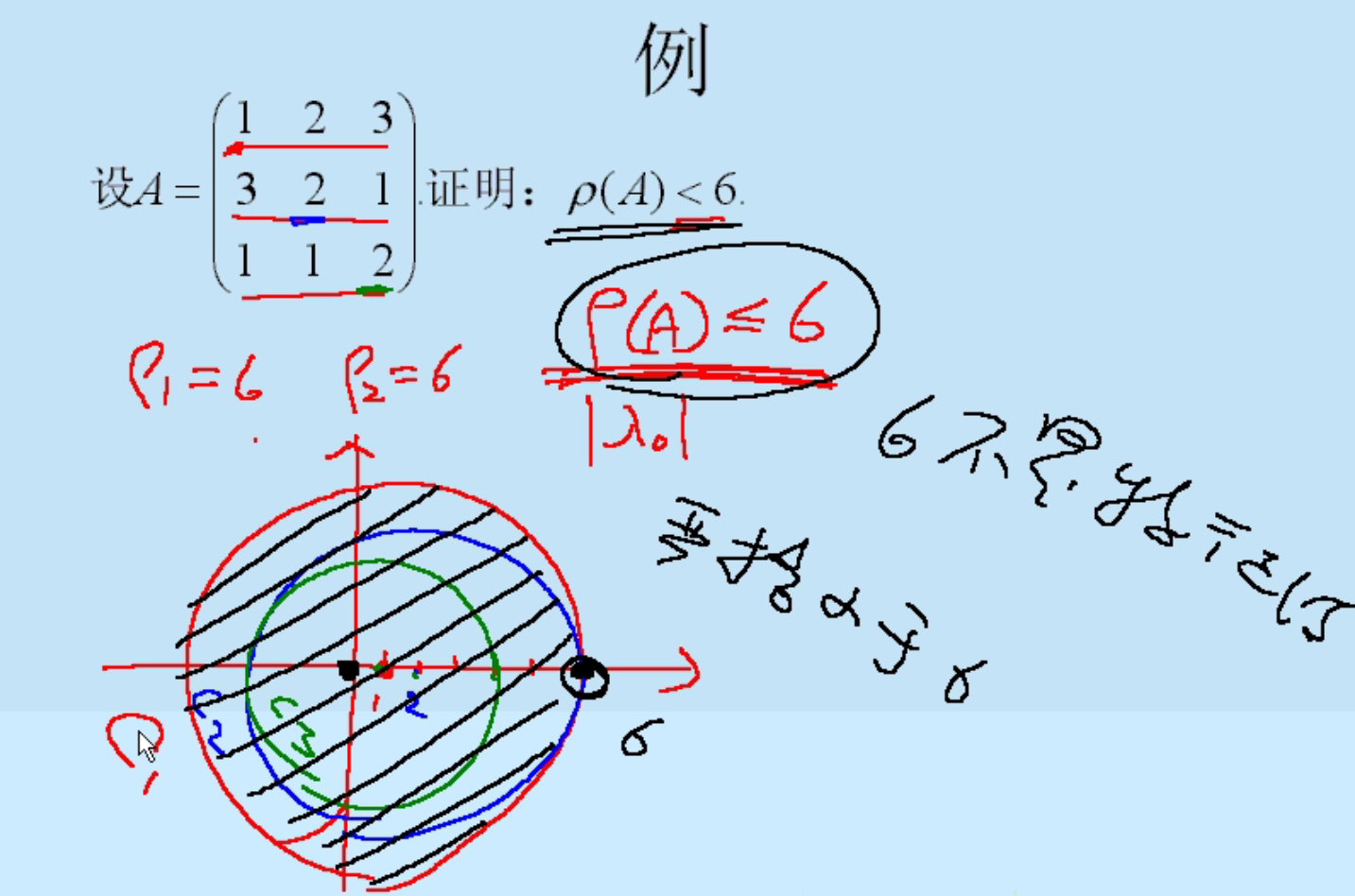
谱半径的估计

\(\rho_1\)由行得出,\(\rho_2\)由列得出。
- 例:
行(列)对角占优矩阵
- 若方阵\(A=(a_{ij})_{n*n}\)的元素满足\(|a_{ii}|>\sum \limits_{j=1,j\neq i}^n|a_{ij}|\ \ \ (i=1,2…,n)\),则称\(A\)为行对角占优矩阵;若\(A^T\)为行对角占优矩阵,则称\(A\)为列对角占优矩阵。统称为对角占优矩阵。
- 推论:若\(A\)是对角占优矩阵,则\(detA\neq 0\),于是\(A\)可逆,且\(\rho(A)<\max \limits_i{2|a_{ii}|}\);若\(A\)的主对角元都是正实数且是对角占优矩阵,则\(A\)的特征值全在右半平面。
Markov矩阵
- 若\(n\)阶方阵\(A=(a_{ij})\)的每个元素非负,且\(\sum \limits_{j=1}^na_{ij}=1\ (i=1,2,…,n)\),则称\(A\)为Markov矩阵。
- 推论:\(A\)为Markov矩阵\(\leftrightarrows1\)是\(A\)的最大模特征值,且\(n\)维向量\(e=(1,1,…,1)^T\)是相应的特征向量。

