MSP430-GPIO与中断相关库函数及例程
0、宏定义
端口
#define GPIO_PORT_P1 1
#define GPIO_PORT_P2 2
#define GPIO_PORT_P3 3
#define GPIO_PORT_P4 4
#define GPIO_PORT_P5 5
#define GPIO_PORT_P6 6
#define GPIO_PORT_P7 7
#define GPIO_PORT_P8 8
#define GPIO_PORT_P9 9
#define GPIO_PORT_P10 10
#define GPIO_PORT_P11 11
#define GPIO_PORT_PA 1
#define GPIO_PORT_PB 3
#define GPIO_PORT_PC 5
#define GPIO_PORT_PD 7
#define GPIO_PORT_PE 9
#define GPIO_PORT_PF 11
#define GPIO_PORT_PJ 13
引脚
#define GPIO_PIN0 (0x0001)
#define GPIO_PIN1 (0x0002)
#define GPIO_PIN2 (0x0004)
#define GPIO_PIN3 (0x0008)
#define GPIO_PIN4 (0x0010)
#define GPIO_PIN5 (0x0020)
#define GPIO_PIN6 (0x0040)
#define GPIO_PIN7 (0x0080)
#define GPIO_PIN8 (0x0100)
#define GPIO_PIN9 (0x0200)
#define GPIO_PIN10 (0x0400)
#define GPIO_PIN11 (0x0800)
#define GPIO_PIN12 (0x1000)
#define GPIO_PIN13 (0x2000)
#define GPIO_PIN14 (0x4000)
#define GPIO_PIN15 (0x8000)
#define GPIO_PIN_ALL8 (0xFF)
#define GPIO_PIN_ALL16 (0xFFFF)
复用功能
#define GPIO_PRIMARY_MODULE_FUNCTION (0x01)
#define GPIO_SECONDARY_MODULE_FUNCTION (0x02)
#define GPIO_TERNARY_MODULE_FUNCTION (0x03)
1、API函数
-
配置为输出端口
void GPIO_setAsOutputPin(uint8_t selectedPort, uint16_t selectedPins) -
配置为输入端口
void GPIO_setAsInputPin(uint8_t selectedPort, uint16_t selectedPins) -
配置为复用功能输出
void GPIO_setAsPeripheralModuleFunctionOutputPin(uint8_t selectedPort, uint16_t selectedPins, uint8_t mode) -
配置为复用功能输入
void GPIO_setAsPeripheralModuleFunctionInputPin(uint8_t selectedPort, uint16_t selectedPins, uint8_t mode) -
输出高电平
void GPIO_setOutputHighOnPin(uint8_t selectedPort, uint16_t selectedPins) -
输出低电平
void GPIO_setOutputLowOnPin(uint8_t selectedPort, uint16_t selectedPins) -
翻转电平输出
void GPIO_toggleOutputOnPin(uint8_t selectedPort, uint16_t selectedPins) -
配置为下拉输入
void GPIO_setAsInputPinWithPullDownResistor(uint8_t selectedPort, uint16_t selectedPins) -
配置为上拉输入
void GPIO_setAsInputPinWithPullUpResistor(uint8_t selectedPort, uint16_t selectedPins) -
读取输入电平
uint8_t GPIO_getInputPinValue(uint8_t selectedPort, uint16_t selectedPins)返回
#define GPIO_INPUT_PIN_HIGH (0x01) #define GPIO_INPUT_PIN_LOW (0x00) -
使能中断
void GPIO_enableInterrupt(uint8_t selectedPort, uint16_t selectedPins) -
禁用中断
void GPIO_disableInterrupt(uint8_t selectedPort, uint16_t selectedPins) -
获取中断状态
uint16_t GPIO_getInterruptStatus(uint8_t selectedPort, uint16_t selectedPins) -
清除中断标志
void GPIO_clearInterrupt(uint8_t selectedPort, uint16_t selectedPins) -
选取中断沿
void GPIO_selectInterruptEdge(uint8_t selectedPort, uint16_t selectedPins, uint8_t edgeSelect)edgeSelect可选参数:GPIO_HIGH_TO_LOW_TRANSITION、GPIO_LOW_TO_HIGH_TRANSITION -
配置驱动能力
void GPIO_setDriveStrength(uint8_t selectedPort, uint16_t selectedPins, uint8_t driveStrength)·driveStrength·可选参数:
GPIO_REDUCED_OUTPUT_DRIVE_STRENGTH、GPIO_FULL_OUTPUT_DRIVE_STRENGTH
2、例程
说明
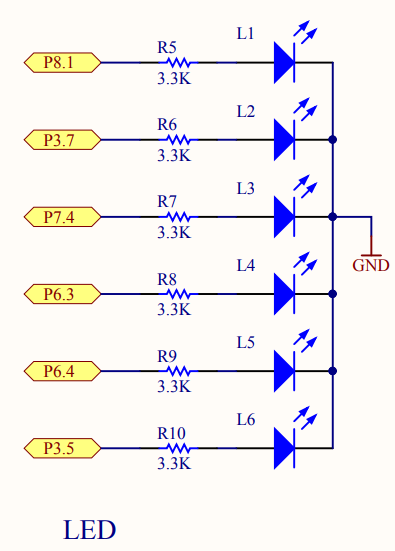
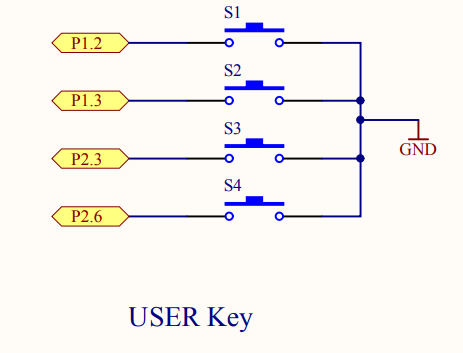
程序示例基于MSP430F5529 LaucnPad及拓展板套件,通过外部中断实现按键控制LED灯状态翻转,分别由S1,S2,S3按键控制L1,L2,L3的亮灭,每按下一次按键LED灯的状态翻转一次。硬件原理图如下:
源码
#include "driverlib.h"
// 消抖延时
void delay(int cnt)
{
while(cnt)
cnt--;
}
int main(void)
{
WDT_A_hold(WDT_A_BASE);
// 配置按键为上拉输入
GPIO_setAsInputPinWithPullUpResistor(GPIO_PORT_P1, GPIO_PIN2 | GPIO_PIN3); // S1 | S2
GPIO_setAsInputPinWithPullUpResistor(GPIO_PORT_P2, GPIO_PIN3); // S3
// 使能中断
_enable_interrupts();
GPIO_enableInterrupt(GPIO_PORT_P1, GPIO_PIN2 | GPIO_PIN3);
GPIO_enableInterrupt(GPIO_PORT_P2, GPIO_PIN3);
// 选取为下降沿
GPIO_selectInterruptEdge(GPIO_PORT_P1, GPIO_PIN2 | GPIO_PIN3, GPIO_HIGH_TO_LOW_TRANSITION);
GPIO_selectInterruptEdge(GPIO_PORT_P2, GPIO_PIN3, GPIO_HIGH_TO_LOW_TRANSITION);
// 清除中断标志
GPIO_clearInterrupt(GPIO_PORT_P1, GPIO_PIN2 | GPIO_PIN3);
GPIO_clearInterrupt(GPIO_PORT_P2, GPIO_PIN3);
// LED配置为输出端口,默认输出高电平
GPIO_setAsOutputPin(GPIO_PORT_P8, GPIO_PIN1); GPIO_setOutputHighOnPin(GPIO_PORT_P8, GPIO_PIN1); // L1
GPIO_setAsOutputPin(GPIO_PORT_P3, GPIO_PIN7); GPIO_setOutputHighOnPin(GPIO_PORT_P3, GPIO_PIN7); // L2
GPIO_setAsOutputPin(GPIO_PORT_P7, GPIO_PIN4); GPIO_setOutputHighOnPin(GPIO_PORT_P7, GPIO_PIN4); // L3
return (0);
}
// 编写中断函数
// P1
#pragma vector=PORT1_VECTOR
__interrupt
void Port_1(void)
{
delay(50000);
if(!( GPIO_getInputPinValue(GPIO_PORT_P1, GPIO_PIN2) &
GPIO_getInputPinValue(GPIO_PORT_P1, GPIO_PIN3) ))
{
//获取中断标志
if(GPIO_getInterruptStatus(GPIO_PORT_P1, GPIO_PIN2)) // S1
{
GPIO_toggleOutputOnPin(GPIO_PORT_P8, GPIO_PIN1); // L1
}
else // S2
{
GPIO_toggleOutputOnPin(GPIO_PORT_P3, GPIO_PIN7); // L2
}
}
//清除中断标志位
GPIO_clearInterrupt(GPIO_PORT_P1, GPIO_PIN2 | GPIO_PIN3);
}
// P2
#pragma vector=PORT2_VECTOR
__interrupt
void Port_2(void)
{
delay(50000);
if(!GPIO_getInputPinValue(GPIO_PORT_P2, GPIO_PIN3))
GPIO_toggleOutputOnPin(GPIO_PORT_P7, GPIO_PIN4); // L3
//清除中断标志位
GPIO_clearInterrupt(GPIO_PORT_P2, GPIO_PIN3);
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号