
首先了解下内旋(静态)和外旋(动态):
静态: 即绕世界坐标系三个轴的旋转,由于物体旋转过程中坐标轴保持静止,所以称为静态,此时各个变换顺序的旋转矩阵是左乘的
动态: 即绕物体坐标系三个轴的旋转,由于物体旋转过程中坐标轴随着物体做相同的转动,所以称为动态,此时各个变换顺序的旋转矩阵是右乘的
内旋Intrinsic rotations:绕运动轴
外旋 Extrinsic rotations: 绕固定轴
动态欧拉角的万向锁问题:
在动态旋转的三次旋转中不管顺序如何只要中间的那次旋转旋转了90度,就会出现第一次旋转和第三次旋转绕着垂直于同一平面的轴旋转,这就是万向锁问题。
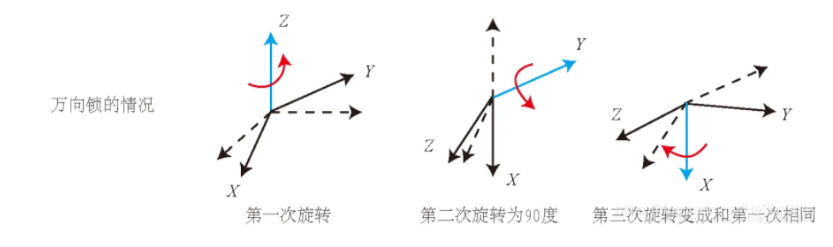
如图所示第一次旋转和第三次旋转都是绕着垂直于原始坐标系XY平面的轴进行旋转的

 浙公网安备 33010602011771号
浙公网安备 33010602011771号