


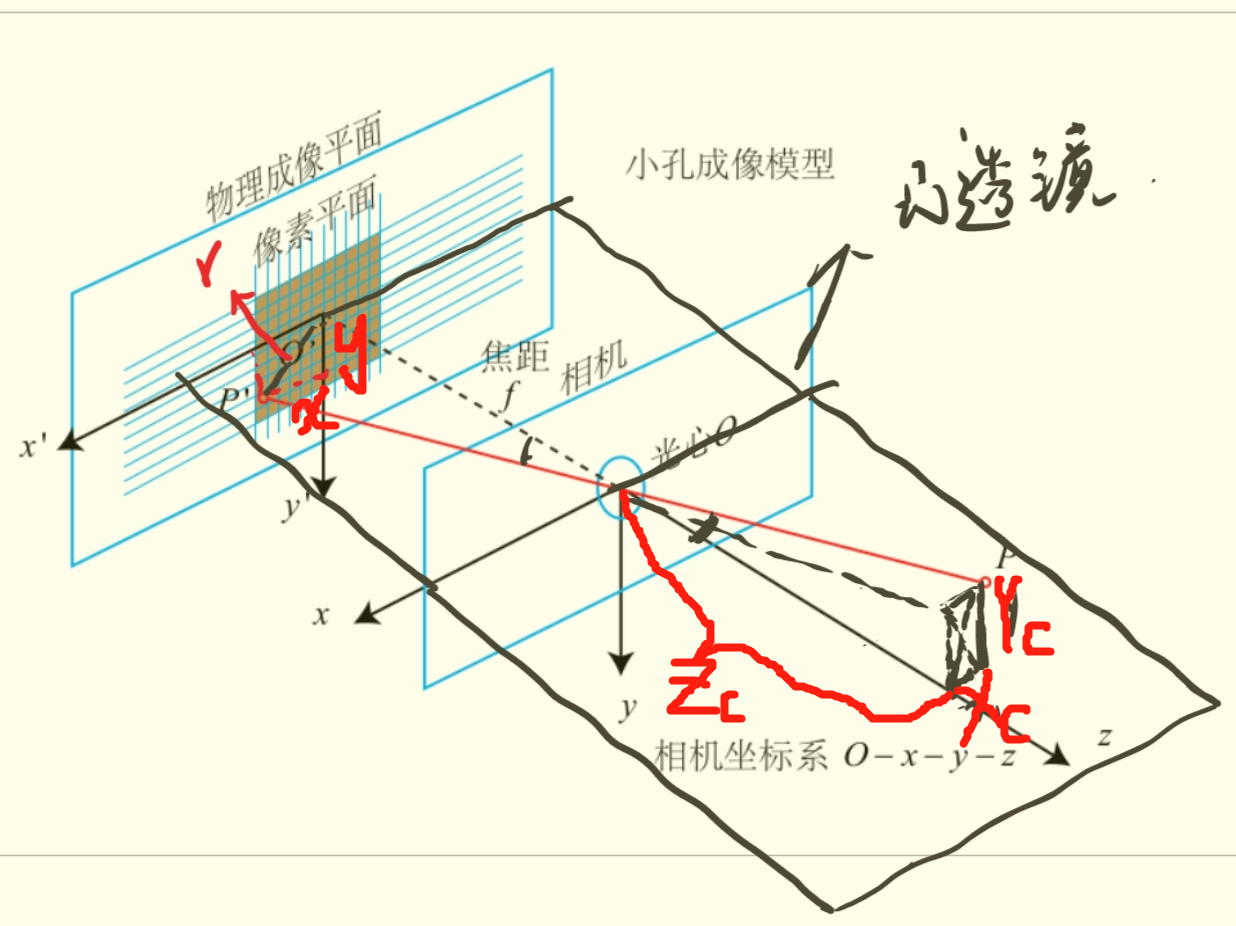
规范化相机
特点:
像素是正方形,像素坐标系和图像坐标系原点重合

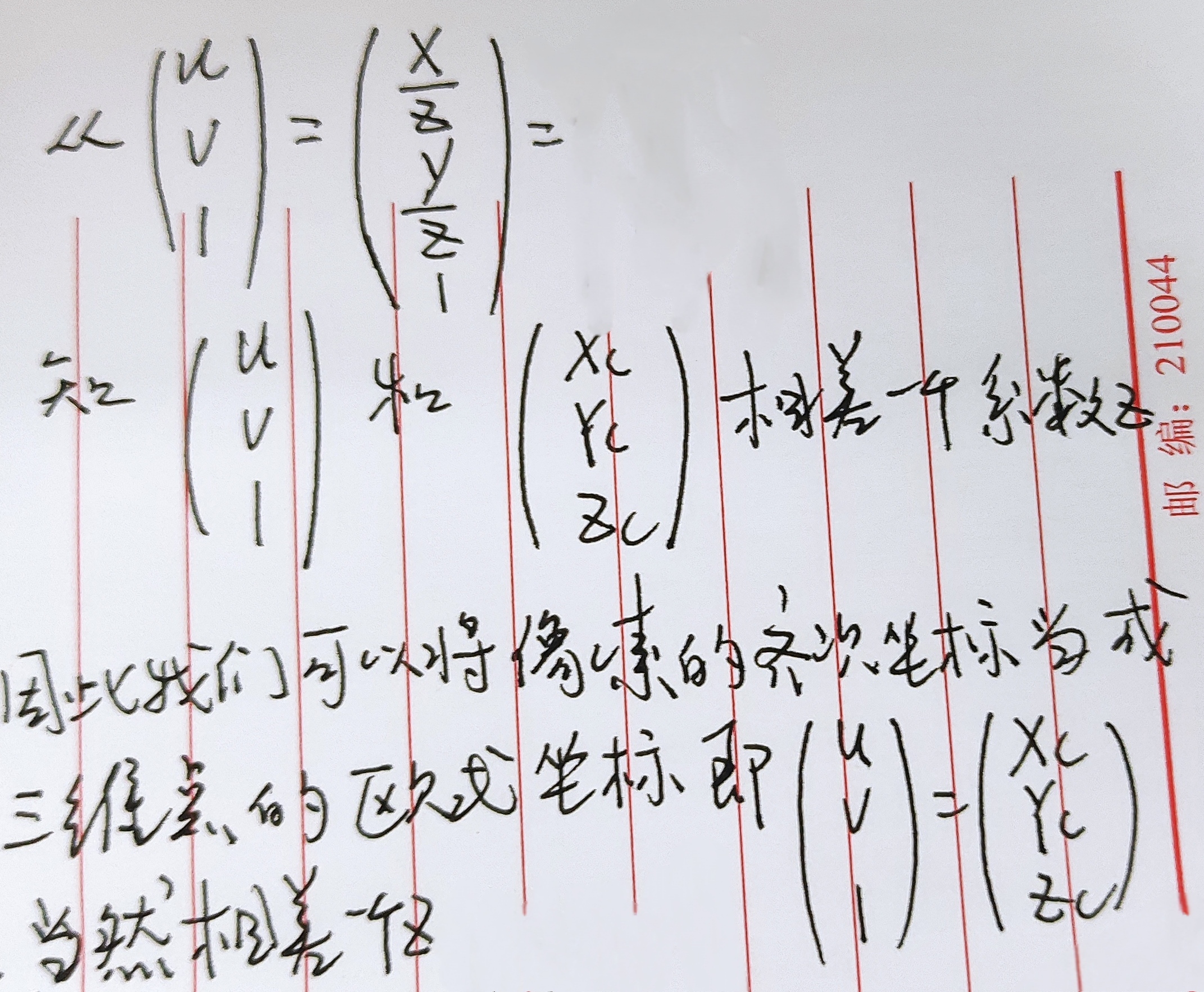
XC,YC,ZC可以认为是世界坐标可以认为是相机坐标下的三维点,因为旋转矩阵为单位矩阵(没有旋转),平移矩阵为0向量,没有平移。同时这里内参矩阵为
弱透视投影相机
假设物体上所有点的深度是一样的,此时物体距离相机足够远(因此弱透视投影用于目标物体较远的情况)
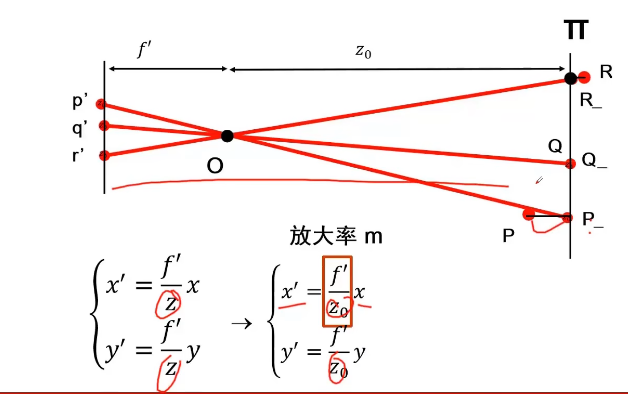
此时Z0在物体位置不变的情况下是不变的
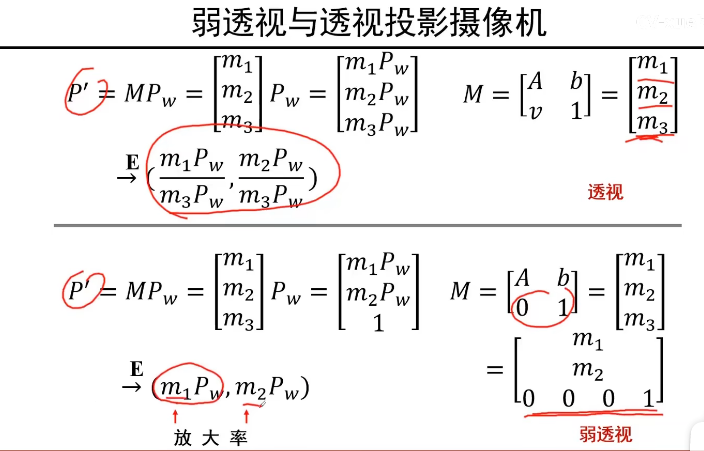

弱透视投影有八个自由度
1.成像半径
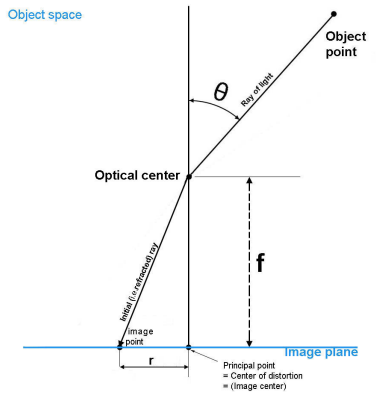
如图r所示为成像半径
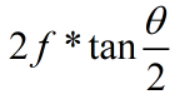
2.透视投影(针孔相机)成像半径


不同相机的成像半径:
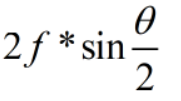
球面投影(Stereographic)
等立体角投影(Equisolid Angle)
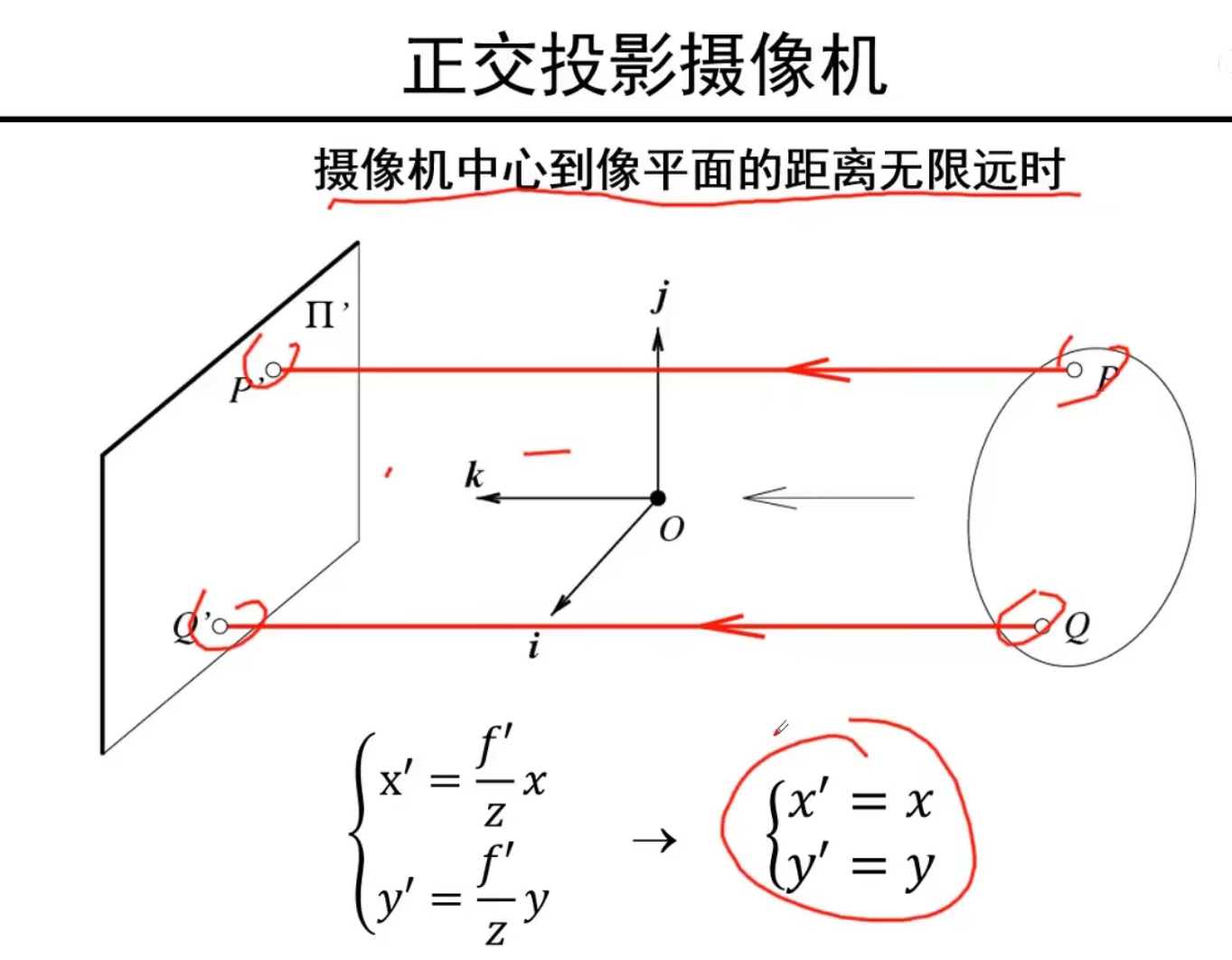
正交投影(Orthographic)
![]()
等距投影(Equidistant)
![]()

Stereographic为透视投影(针孔相机)的曲线,如图像可知随着入射角增大只有正交投影和等立体角投影成像半径基本趋于常数,而其他投影基本成像半径趋向于无穷(表明像平面需要无限大)
3.鱼眼相机成像模型

式(21)的解释:
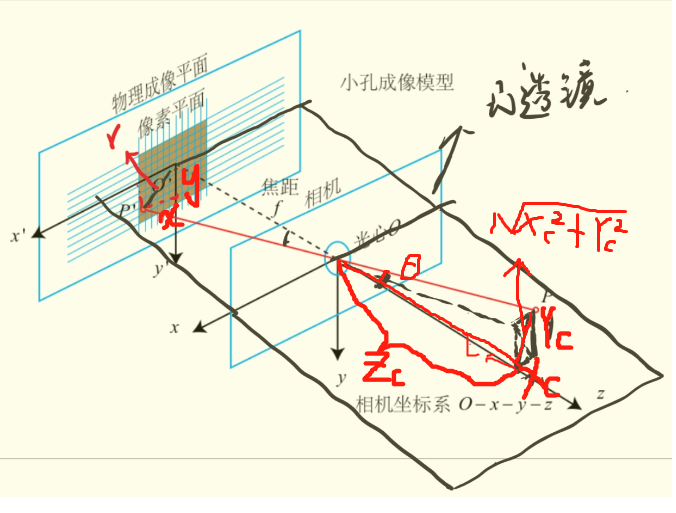
对三角形PLO求tanθ


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 10年+ .NET Coder 心语 ── 封装的思维:从隐藏、稳定开始理解其本质意义
· 【设计模式】告别冗长if-else语句:使用策略模式优化代码结构
· 提示词工程——AI应用必不可少的技术
· 字符编码:从基础到乱码解决
· 地球OL攻略 —— 某应届生求职总结