
一.盒式滤波与积分图
盒式滤波器:
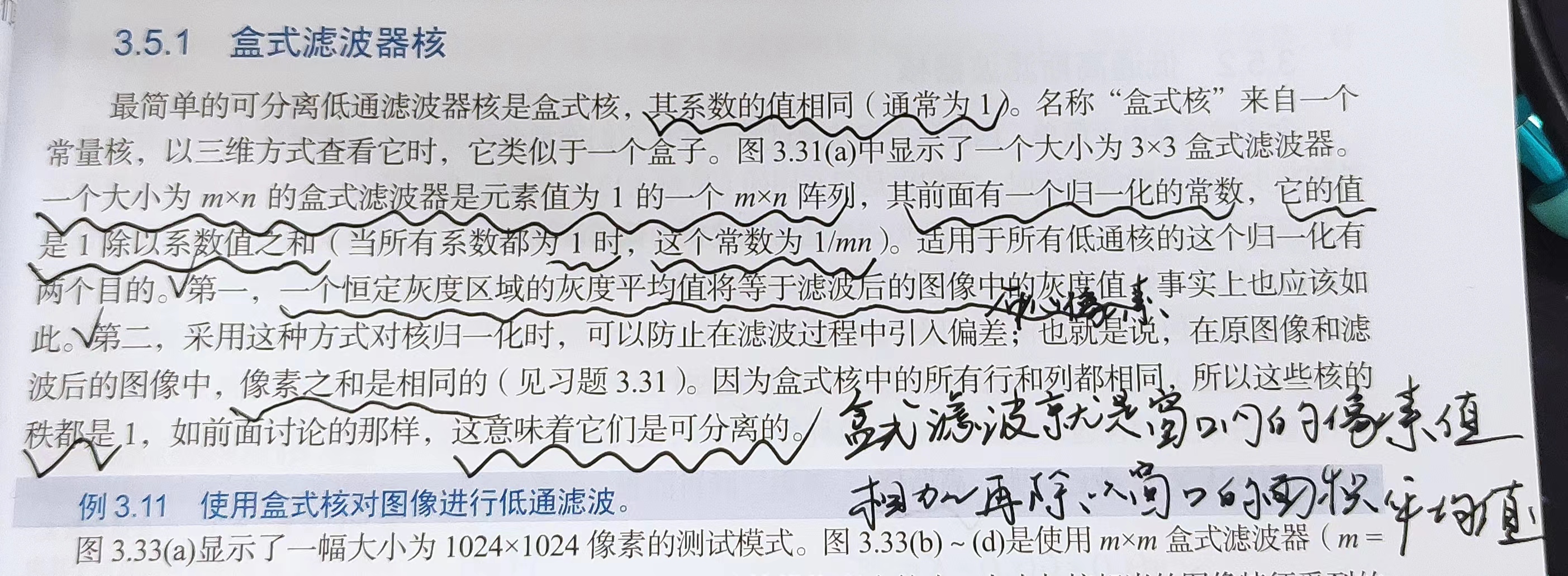
积分图的知识见积分图像 - 小凉拖 - 博客园 (cnblogs.com)
二.Hessian矩阵与DOH
每个像素的Hessian矩阵如下:


当Hessian矩阵的判别式取得局部极大值时,判定当前点是比周围邻域内其他点更亮或更暗的点,由此来定位关键点的位置,Hessian矩阵的判别式为(也就是它的行列式为Determinant of Hessian, DoH):

三.带有高斯核的Hessian矩阵
但是由于我们的关键点需要具备尺度无关性(唯有高斯核通过不同的方差(也就是尺度)才能体现出图像由远及近的效果,也就是所谓的尺度无关性),所以在进行Hessian矩阵构造前,需要对其进行高斯滤波。具体步骤为先对高斯核带入Hessian矩阵,然后结果矩阵的每个元素对图像进行卷积得到一个新的矩阵(此步对先对图像进行高斯卷积,再求取高斯卷积后的图像的Hessian矩阵的简便求法,这个过程用到了卷积的微分性质)。
1.卷积的微分性质:

2.复习下卷积的微积分性质:

3.高斯核带入Hessian矩阵的表达式为

分别将上述矩阵的四个元素的和图像进行卷积,以第一个元素(1,1)为例,根据高斯核进行二阶求导后生成任意尺寸的窗口,然后与图像进行卷积,该结果为![]() ,则最终结果为H(x,y,σ):
,则最终结果为H(x,y,σ):

上述提到的简便算法为:

H(x,y,σ)的行列式为:
det(H(x,y,σ))=![]()
四.带有盒式核的Hessian矩阵
由于高斯核是服从正态分布的,从中心点往外,系数越来越低,为了提高运算速度,Surf使用了盒式滤波器来近似替代高斯滤波器,提高运算速度。 盒式滤波器(Boxfilter)对图像的滤波转化成计算图像上不同区域间像素和的加减运算问题,只需要简单几次查找积分图就可以完成。
盒式滤波器核高斯滤波器比较

带有盒式滤波的Hessian矩阵为:
Hbox=
det(Hbox)=DxxDyy-Dxy^2
但在SURF算法中用于近似带有高斯核的Hessian矩阵的行列式的盒式矩阵的行列式得稍加修改:

权重w为了平衡因使用盒式滤波器近似所带来的误差。


这里的面积归一化处理应该就是第一节里面的盒式滤波的归一化,这里的滤波响应是Hessian矩阵的行列式。
这最终用于SURF的响应为

使用近似的Hessian矩阵行列式来表示一个图像中某一点处的斑点响应值(斑点通常是指与周围有着颜色和灰度差别的区域),遍历图像中的所有像素,便形成了在某一尺度下斑点检测的响应图像。使用不同的模糊尺度和模板尺寸,便形成了多尺度斑点响应的金字塔图像,利用这一金字塔图像,可以进行斑点响应极值点的搜索定位,其过程与SIFT算法类似。总结起来就是求盒式滤波的Hassian矩阵,然后将Hassian矩阵的各个元素与原图像卷积,之后求Hassian矩阵的行列式作为最终的像素值
五.SURF变换的步骤
1.构建尺度空间
要想检测不同尺度的极值点,必须建立图像的尺度空间金字塔。一般的方法是通过采用不同σ的高斯函数,对图像进行平滑滤波,然后重采样获得更高一层的金字塔图像。SIFT算法中是通过相邻两层高斯金字塔图像相减得到DoG图像,然后在DoG金字塔图像上进行关键点检测。与SIFT特征不同的是,SURF算法不需要通过降采样的方式得到不同尺寸大小的图像建立金字塔,而是借助于盒式滤波和积分图像,不断增大盒式滤波模板(上采样),通过积分图快速计算盒式滤波的响应图像。然后在响应图像上采用非极大值抑制,检测不同尺度的关键点。SURF算法的近似DoH金字塔如下图所示:

我们使用9×9的模板对图像进行滤波,其结果作为最初始的尺度空间层(此时,尺度值为s=1.2,近似σ=1.2的高斯微分),至于为什么是1.2为什么是9×9这个论文原文没有说,记住就行了。这样盒式滤波组成的金字塔,每层的尺寸是完全固定的,不随图像的改变而改变。那么盒式滤波的最初尺度空间层的Dxx,Dyy,Dxy也是固定的,其模板如下
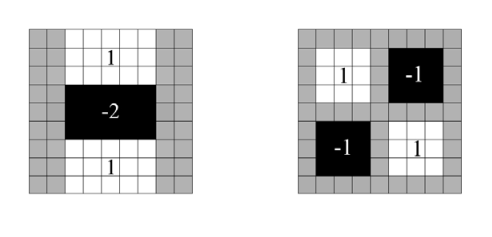
上图分别给出了Dyy,Dxy,它们近似的1.2尺度的高斯二阶微分如下:

接下来增大盒式滤波器的模板

21怎么求出来的呢:(5+2)×3, 27怎么求出来的呢(7+2)×3,以此类推。
9×9到27×27作为第一组的所有模板
第二组的初始模板为9+6×2^m-1(m=1,2,3……),m是组数减1,那么第二组的模板为(15,27,39,51),第三组为(27,51,75,99)
注意增大模板增大的是Dxx,Dxy,Dyy的模板,三个模板都遵循以上规则。
构建好模板接下来就是将Hassian矩阵的各个元素Dxx,Dxy,Dyy与原图像卷积,之后求Hassian矩阵的行列式作为最终的像素值,至此构建好了SURF的金字塔。
2.关键点的定位
和SIFT算法一样,这里和DoG不同的是不用剔除边缘导致的极值点了,因为Hessian矩阵的行列式就已经考虑到边缘的问题了。
注意这里的σ求法为:

3.主方向的确定
个人认为在求完每层的极大值后,这些极大值是亚像素点,哪一层的σ为与亚像素点的σ最接近就选哪一层。接下来在被选为确定主方向的层中的关键点的位置以6*s(s=1.2∗L/9为关键点的尺度)为半径的圆形区域,对图像进行Haar小波响应运算(就是以Haar小波的模板对该区域中的图像进行滤波,该模板的尺度为4s×4s,该模板的中心对准所求像素点)。
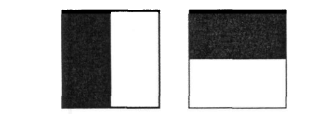
其中左侧模板计算X方向的响应,右侧模板计算y方向的响应,黑色表示-1,白色表示+1。用其对圆形领域进行处理后,就得到了该领域内每个点对应的x,y方向的响应,这里分别得到了一个x方向的响应和y方向的响应图像,然后用以关键点为中心的高斯函数()对这些这两幅图像的响应进行加权(每一个图像乘以他的权值)。
为了求取主方向值,需要设计一个以关键点为中心,张角为60度的扇形滑动窗口,统计这个扇形区域内的haar小波特征总和。以步长为0.2弧度左右,旋转这个滑动窗口,再统计小波特征总和。小波特征总和最大的方向为主方向。特征总和的求法是对图像Harr小波响应值dx、dy进行累加,得到一个矢量:
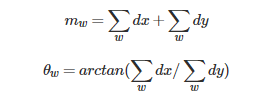
主方向为最大Harr响应累加值所对应的方向,也就是最长矢量所对应的方向,即
 (也就是最大mw对应的θw)
(也就是最大mw对应的θw)
可以依照SIFT求方向时策略,当存在另一个相当于主峰值80%能量的峰值时,则将这个方向认为是该特征点的辅方向。一个特征点可能会被指定具有多个方向(一个主方向,一个以上辅方向),这可以增强匹配的鲁棒性。和SIFT的描述子类似,如果在中出现另一个大于主峰能量
的80%时的次峰,可以将该特征点复制成两个特征点。一个主的方向为最大响应能量所对应的方向,另一个主方向为次大响应能量所对应的方向。
4.特征描述子的求取
以关键点为中心选取一个正方形框住一个图像区域,再将此区域中所有像素点连同这个区域旋转到关键点的主方向(关键点到矩形边框的线段表示关键点的主方向),边长为20S。将其划分为16个区域(边长为5S,也就是被划分为4×4个子块),每个子块利用尺寸2s的Harr模板对该5S×5S子块内所有像素响应值计算,然后对所有像素的响应值进行统计∑dx、∑|dx|、∑dy、∑|dy|(所有像素x方向响应的加和,所有像素x方向响应绝对值的加和,所有像素y方向响应的加和,所有像素y方向响应绝对值的加和,且注意dy沿主方向,dx垂直于主方向)形成特征矢量。


特征描述子共由4×4×4=64维特征矢量组成。
SURF描述子不仅具有尺度和旋转不变性,还具有光照不变性,这由小波响应本身决定,而对比度不变性则是通过将特征向量归一化来实现。

一般而言,特征矢量的长度越长,特征矢量所承载的信息量就越大,特征描述子的独特性就越好,但匹配时所付出的时间代价就越大。对于SURF描述子,可以将它扩展到用128维矢量来表示。具体方法是在求∑dx、∑|dx|时区分dy<0和dy≥0情况。同时,在求取∑dy、∑|dy|时区分dx<0和dx≥0情况。这样,每个子块就产生了8个梯度统计值,从而使描述子特征矢量的长度增加到8×4×4=128维。
为了实现快速匹配,SURF在特征矢量中增加了一个新的变量,即特征点的拉普拉斯响应正负号。在特征点检测时,将Hessian矩阵的迹的正负号记录下来,作为特征矢量中的一个变量(Hessian矩阵的迹为拉普拉斯响应)。这样做并不增加运算量,因为特征点检测进已经对Hessian矩阵的迹进行了计算()。在特征匹配时,这个变量可以有效地节省搜索的时间,因为只有两个具有相同正负号的特征点才有可能匹配,对于正负号不同的特征点就不进行相似性计算。
简单地说,我们可以根据特征点的响应值符号,将特征点分成两组,一组是具有拉普拉斯正响应的特征点,一组是具有拉普拉斯负响应的特征点,匹配时,只有符号相同组中的特征点才能进行相互匹配。显然,这样可以节省特征点匹配的时间。

实际上有文献指出,SURF比SIFT工作更出色。他们认为主要是因为SURF在求取描述子特征矢量时,是对一个子块的梯度信息进行求和,而SIFT则是依靠单个像素梯度的方向。
以上只是个人理解,欢迎批评指正。
参考文章:
(53条消息) 【OpenCV 例程200篇】56. 低通盒式滤波器_YouCans的博客-CSDN博客_盒式滤波

 浙公网安备 33010602011771号
浙公网安备 33010602011771号