STM32之USART通信
USART
学习资料:
通信是什么
-
通信的目的:将一个设备的数据传送到另一个设备,扩展硬件系统
-
通信协议:是两个(或多个)设备之间进行通信,必须要遵循的一种协议。通讯协议分为物理层和协议层。
- 物理层:规定通讯系统中具有机械、电子功能部分的特性,确保原始数据在物理媒体的传输;
- 协议层:规定通讯逻辑,统一收发双方的数据打包、解包标准。
-
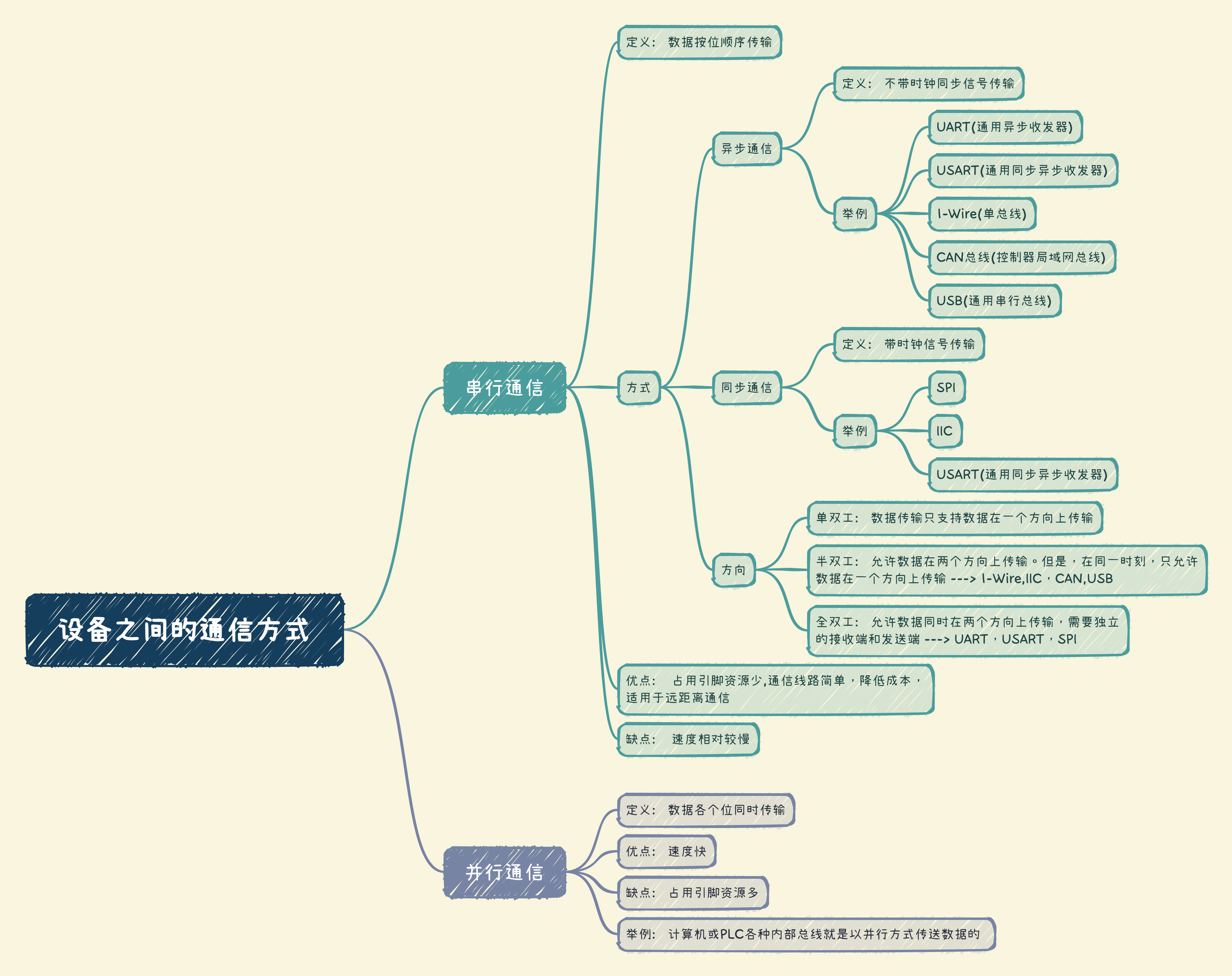
通信的方式:
USART介绍
USART(通用同步异步收发器):提供了一种灵活的方法与使用工业标准NRZ异步串行数据格式的外部设备之间进行全双工数据交换。
USART利用分数波特率发生器提供宽范围的波特率选择。 它支持同步单向通信和半双工单线通信,也支持LIN(局部互连网),智能卡协议和IrDA(红外数据 组织)SIR ENDEC规范,以及调制解调器(CTS/RTS)操作。它还允许多处理器通信。 使用多缓冲器配置的DMA方式,可以实现高速数据通信。
同步通信
同步通信双方都要有时钟引脚,双方的时钟CLK引脚是连接在一起的,通信时由主机传送时钟信号,提供同步脉冲,双方根据这个时钟信号,来确定发送或接受每个位,确保数据传输的时候完全同步。
- 时钟同步
- 信息格式为信息帧(一次通信中传输的数据,可 不止8位)
具体信息将在SPI一节讲解
异步通信
我们使用USART实现异步通信,那么如何保证异步通信的可靠性
- 固定的数据帧
- 传输速度双方必须相同,波特率
对于发送设备和接收设备来说,两者的串行通信配置(波特率、单位字的位数、奇偶校验、起始位数与结束位、流量控制)应该设置为完全相同。通过在数据流中插入特定的比特序列,可以指示通信的开始与结束。当发送一个字节数据的时候,需要在比特流的开头加上起始位,并在比特流的末尾加上结束位。数据字节的最低位紧接在起始位之后。
电平标准
电平标准是数据1和数据0的表达方式,是传输线缆中人为规定的电压与数据的对应关系,串口常用的电平标准有如下三种:
-
TTL电平:+3.3V或+5V表示1,0V表示0
-
RS232电平:-3V ~ -15V表示1,+3 ~ +15V表示0
-
RS485电平:两线压差+2 ~ +6V表示1,-2 ~ -6V表示0(差分信号)
串口的专业名词
-
波特率:串口通信的速率,单位时间传输了多少个码元,0或1
- 码元:数据传输过程中等时出现的符号
- 单片机中,采用二进制码元,码元就是0或9600bps: 每秒传输9600个二进制位数 或 传输一个0或1需要1/9600s
- 比特率: 每秒传输了多少个二进制位数 0或1
- 总结:在单片机里,波特率和比特率代表的意义相同,但是其它领域,不一定相同。因为不果所有领域里面的码元都是二进制的0或1。
-
起始位(1位):标志一个数据帧的开始,固定为低电平,也就是 空闲状态下 为高电平
-
数据位(8位):数据帧的有效载荷,1为高电平,0为低电平,低位先行
-
奇偶校验位(1位):用于数据验证,根据数据位计算得来 -- 可选 无校验位,奇校验,偶校验
-
停止位(1位):用于数据帧间隔,固定为高电平
STM32中的USART外设
USART的框图
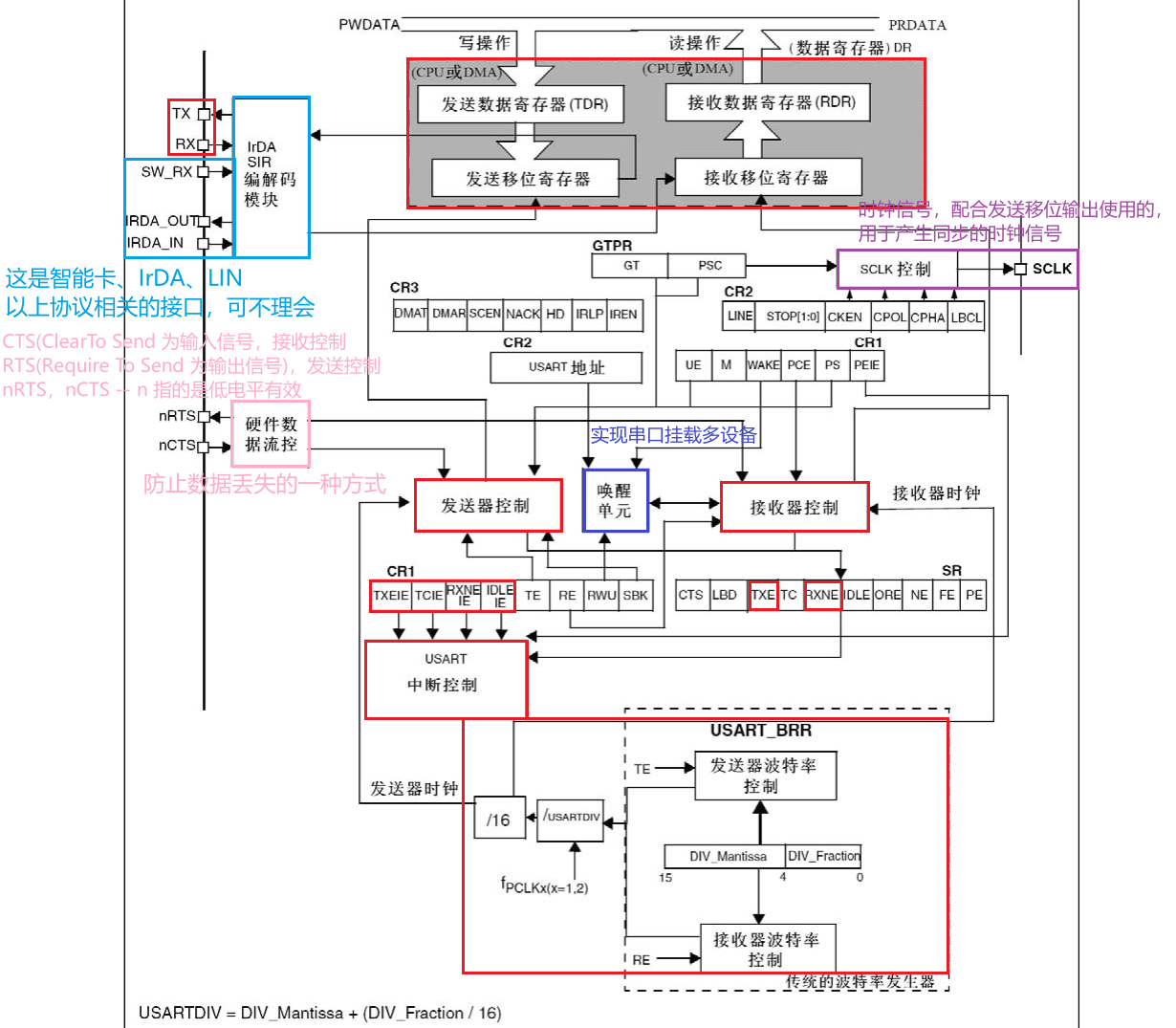
- 标志位TXE(TX Empty),当其置1时,其实数据还未发送过去,但是此时我们可以写入下一个数据 原因是 : 只是从发送数据寄存器TDR转移到了 发送移位寄存中 其就会置1 在代码中 就是
void Usart_Tx(uint8_t data)//单字节 8位 发送
{
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==0);//等待数据转移到发送移位寄存器中 直到TC == 1时 表示数据已经发送给移位寄存器了 可以写入新的数据了
USART_SendData(USART1,data);
}
/**
* @brief Transmits single data through the USARTx peripheral.
* @param USARTx: Select the USART or the UART peripheral.
* This parameter can be one of the following values:
* USART1, USART2, USART3, UART4 or UART5.
* @param Data: the data to transmit.
* @retval None
*/
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data)
{
/* Check the parameters */
assert_param(IS_USART_ALL_PERIPH(USARTx));
assert_param(IS_USART_DATA(Data));
/* Transmit Data */
USARTx->DR = (Data & (uint16_t)0x01FF); //这里就是TDR
}
-
TDR 和 RDR占用一个地址,但实际硬件中是两个寄存器 可对比51单片机中的 SUBF来理解
- SBUF: 串口数据缓存寄存器,物理上是两个独立的寄存器相同的地址。写操作时,写入的是发送寄存器,读操作时,读出的是接收寄存器 也就是 串口通信的发送和接收电路在物理上有 2 个名字相同的 SBUF 寄存器,它们的地址也都是 0x99,但是一个用来做发送缓冲,一个用来做接收缓冲。意思就是说,有 2 个房间,两个房间的门牌号是一样的,其中一个只出人不进人,另外一个只进人不出人,这样的话,我们就可以实现 UART 的全双工通信,相互之间不会产生干扰。但是在逻辑上呢,我们每次只操作 SBUF,单片机会自动根据对它执行的是“读”还是“写”操作来选择是接收 SBUF 还是发送 SBUF
-
发送移位寄存器是向右移位数据的 正好对应串口的低位先行
-
接收移位寄存器是先将接收的数据放在最高位,然后一位一位的向右移动,移位8次就可以得到1个字节
-
标志位RXNE(RX Not Empty),接收数据寄存器非空,当检测其置1时,我们就可以从 接收移位寄存器 把数据移到 接收数据寄存器RDR中 在程序上的体现就是
uint8_t Usart_Rx(void)//接收 单字节 8位
{
uint8_t data = 0;
while( USART_GetFlagStatus(USART1, USART_FLAG_RXNE)==0){}//等待接收数据完成标志 直到RXNE == 1表示数据接收完成
data = USART_ReceiveData(USART1);
return data;
}
/**
* @brief Returns the most recent received data by the USARTx peripheral.
* @param USARTx: Select the USART or the UART peripheral.
* This parameter can be one of the following values:
* USART1, USART2, USART3, UART4 or UART5.
* @retval The received data.
*/
uint16_t USART_ReceiveData(USART_TypeDef* USARTx)
{
/* Check the parameters */
assert_param(IS_USART_ALL_PERIPH(USARTx));
/* Receive Data */
return (uint16_t)(USARTx->DR & (uint16_t)0x01FF);//这里其实是 RDR
}
- 数据帧可以通过编程USART_CR1寄存器中的M位,选择成8或9位
- 可配置的停止位 随每个字符发送的停止位的位数可以通过控制寄存器2的位13、12进行编程。
- 1个停止位:停止位位数的默认值。
- 2个停止位:可用于常规USART模式、单线模式以及调制解调器模式。
- 0.5个停止位:在智能卡模式下接收数据时使用。
- 1.5个停止位:在智能卡模式下发送和接收数据时使用。
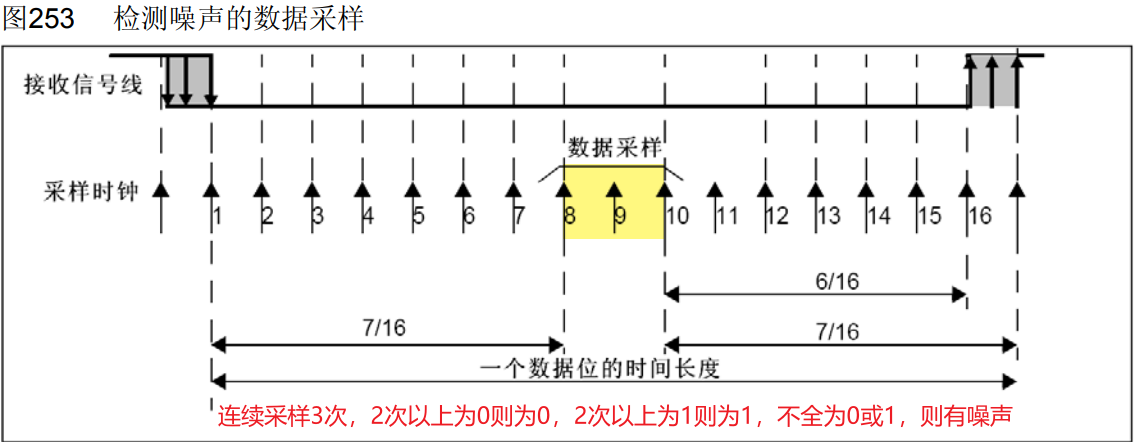
数据是如何稳定接收的
起始位侦测
在USART中,如果辨认出一个特殊的采样序列,那么就认为侦测到一个起始位。 该序列为:1 1 1 0 X 0 X 0 X 0 0 0 0
下图就是 起始位侦测 和 采样位置对齐策略
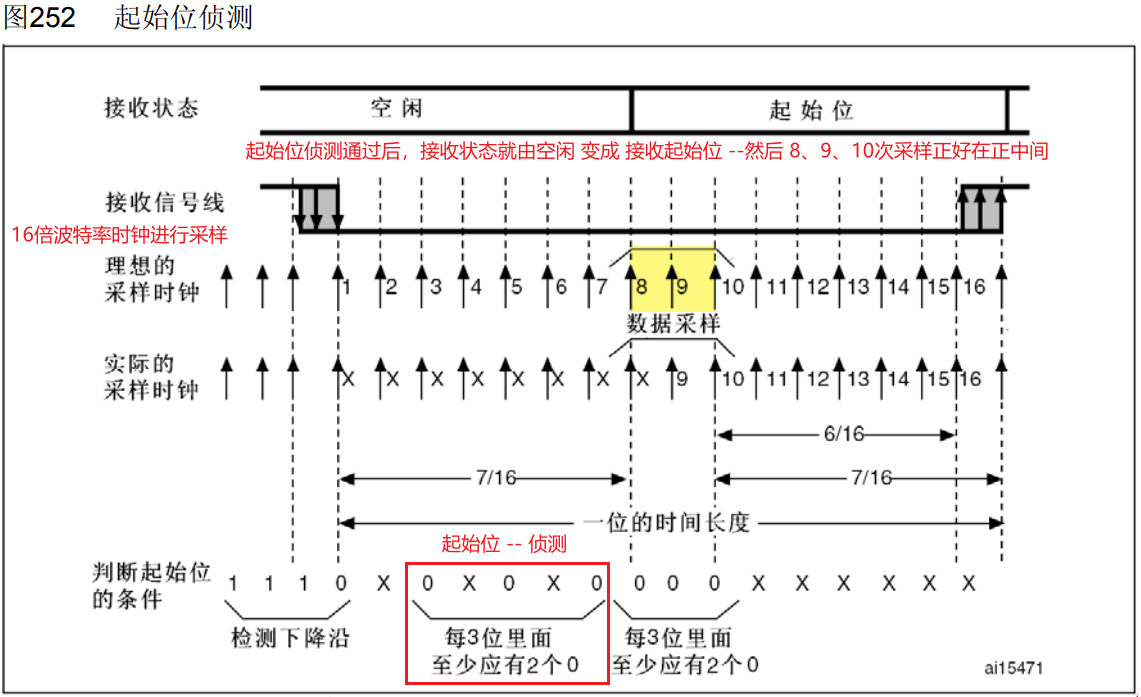
关于接收器的设计最主要的一点是如何提高采样的准确率,最好是保证采样点处于被采样数据的时间中间点。所以,在接收采样时要用比数据波特率高n倍(n≥1)速率的时钟对数据进行采样
如果该序列不完整,那么接收端将退出起始位侦测并回到空闲状态(不设置标志位)等待下降沿。
如果3个采样点都为’0’(在第3、5、7位的第一次采样,和在第8、9、10的第二次采样都为’0’), 则确认收到起始位,这时设置RXNE标志位,如果RXNEIE=1,则产生中断。
如果两次3个采样点上仅有2个是’0’(第3、5、7位的采样点和第8、9、10位的采样点),那么起始 位仍然是有效的,但是会设置NE噪声标志位。如果不能满足这个条件,则中止起始位的侦测过 程,接收器会回到空闲状态(不设置标志位)。
如果有一次3个采样点上仅有2个是’0’(第3、5、7位的采样点或第8、9、10位的采样点),那么起 始位仍然是有效的,但是会设置NE噪声标志位。
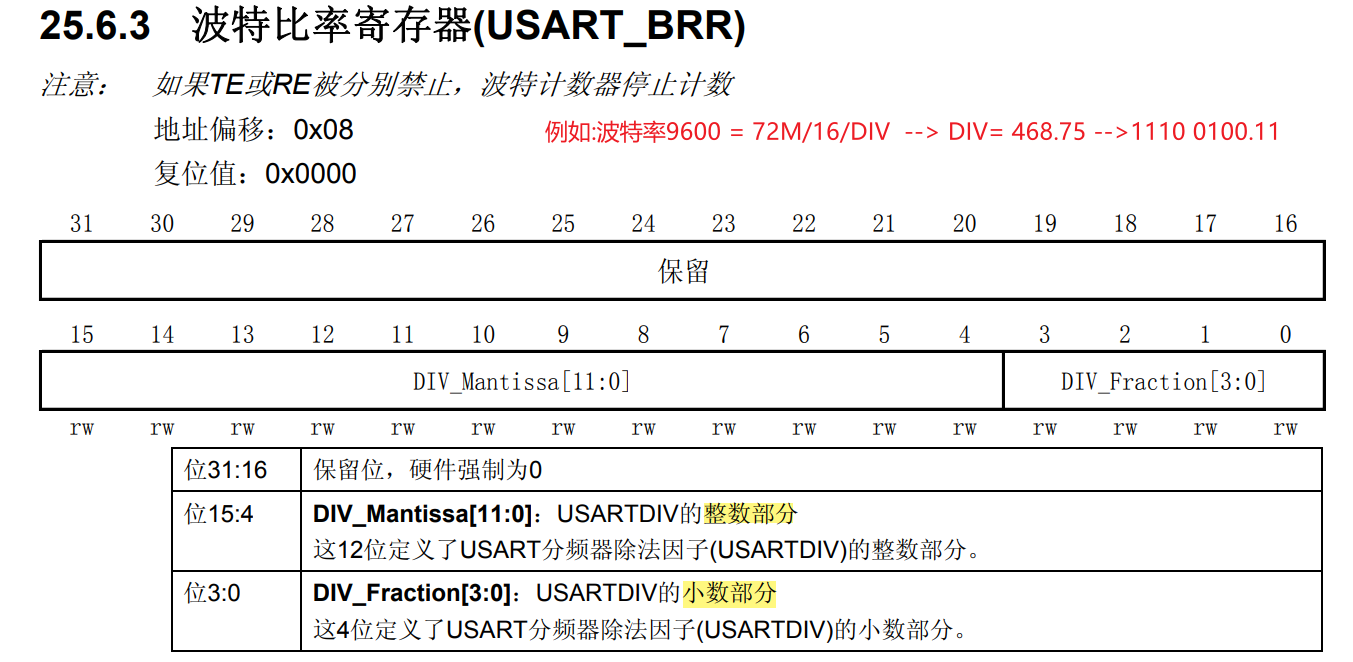
波特率发生器
发送器 和 接收器 的波特率由波特率寄存器BRR里的分频系数DIV确定 -- 除以16是因为上方的采样数据时钟频率,所以在除以分频系数DIV后再除以16
计算公式: $$Tx / Rx波特率 = \cfrac { f_{PCLK2/1}}{16 * DIV}$$
USART实战演习
简单的串口发送和接收(串口助手向单片机发送 然后单片机通过printf再次打印到串口助手上)
USART.H
#ifndef __USART_H__//如果没有定义了则参加以下编译
#define __USART_H__//一旦定义就有了定义 所以 其目的就是防止模块重复编译
#include "stm32f10x.h"
#include "stdio.h"
#include <stdarg.h>
void Usart_Init(void);
void Usart1_SendByte(uint8_t Byte);
void Usart1_SendArray(uint8_t *Array,uint16_t Lenth);
void Usart1_SendString(char *string);
uint32_t Math_Pow(uint32_t X, uint32_t Y);
void Usart1_SendNumber(uint32_t Num,uint8_t Length);
void Serial_Printf(char *format, ...);
#endif //结束编译
USART.C
#include "usart.h"
/*
*PA9 -- TX
*PA10 -- RX
*/
void Usart_Init(void)
{
//使能时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE);//使能时钟A和USART1
//为初始化函数做准备
GPIO_InitTypeDef GPIO_InitStructure;//定义结构体
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;//设置PA9引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP ;//设置输出模式为复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz ;//设置输出速度为50MHZ
//初始化函数PIN9↓
GPIO_Init(GPIOA,&GPIO_InitStructure);//初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//设置PA10引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU ;//设置输出模式为上拉输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz ;//设置输出速度为50MHZ
//初始化函数PIN10↓
GPIO_Init(GPIOA,&GPIO_InitStructure);//初始化
USART_InitTypeDef USART_InitStructure; //定义串口结构体
USART_InitStructure.USART_BaudRate = 9600; //波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//数字帧长度
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //不使用校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//不使用硬件流控制
USART_InitStructure.USART_Mode = USART_Mode_Tx|USART_Mode_Rx; //模式为发送+接收
//初始化串口1
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_InitTypeDef NVIC_InitStructure; //定义结构体
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //根据上面的我们所选取的USART1
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;//这里选择的是抢占 1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //这里选择的是响应1
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能指定的中断通道
//初始化函数↓
NVIC_Init(&NVIC_InitStructure);
//使能串口1
USART_Cmd(USART1, ENABLE);
}
/**
* @brief 串口1发送字节 -- 发送的最基本的函数 -->其它发送函数都是基于它
* @param
* @retval
*/
void Usart1_SendByte(uint8_t Byte)
{
USART_SendData(USART1,Byte);
/*
*当TDR寄存器中的数据被硬件转移到移位寄存器的时候该位被硬件置位 也就是TXE = 1
* 当又对USART_DR-TDR进行写操作时,该位将自动清零
*/
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET );
}
/**
* @brief 串口接收函数 -- 对于串口来说 有查询和中断两种方法进行接收数据判断
查询的方式是:在主函数中不断查询标志位的方式 -- 👇
中断的方式: 和其它中断一样 当这个标志位发生了 再进入中断
* @param
* @retval
*/
uint8_t Usart1_RecvByte(void)
{
uint8_t Data = 0;
if(USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == SET)//接收数据完成标志 RXNE == 1表示数据接收完成
{
Data = USART_ReceiveData(USART1);
}
return Data;
}
/**
* @brief 串口中断函数
当RDR移位寄存器中的数据被转移到USART_DR寄存器中,该位被硬件置位
对USART_DR的读操作可以将该位清零 -- 也就是说当有单片机接收并读取了数据 这个就会自动清零 如果没读取需要手动清除
中断函数里面可以放你想要实现的功能函数
* @param
* @retval
*/
void USART1_IRQHandler(void)
{
uint8_t RxData = 0;
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
RxData = USART_ReceiveData(USART1);
printf("%X\r\n",RxData);
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
/**
* @brief 发送数组
* @param
* @retval
*/
void Usart1_SendArray(uint8_t *Array,uint16_t Length)
{
for(uint8_t i = 0;i<Length;i++)
{
Usart1_SendByte(Array[i]);
}
}
/**
* @brief 发送字符串
* @param string 字符串
* @retval
*/
void Usart1_SendString(char *string)
{
for(uint8_t i = 0;string[i] != '\0';i++)
{
Usart1_SendByte(string[i]);
}
}
/**
* @brief 发送十进制数字
* @param
* @retval
*/
void Usart1_SendNumber(uint32_t Num,uint8_t Length)//以文本模式查看发送的数字--发送的啥 就在串口助手上显示啥
{
uint8_t i;
for (i = 0; i < Length; i ++)
{
Usart1_SendByte(Num / Math_Pow(10, Length - i - 1) % 10 + '0');//10进制 转换成 十六进制 1. 取出这一位的数--NUM/10的Length方%10 2.加上ASCLL的值
}
}
/**
* @brief 数学公式X的Y次方
* @param
* @retval X的Y次方
*/
uint32_t Math_Pow(uint32_t X, uint32_t Y)//返回的是X的Y次方
{
uint32_t Result = 1;
while (Y --)
{
Result *= X;
}
return Result;
}
/**
* @brief 函数重定义--封装printf函数
* @param
* @retval
*/
int fputc(int ch, FILE *f)
{
Usart1_SendByte(ch);
return ch;
}
void Serial_Printf(char *format, ...)//可变参数 -- 封装
{
char String[100];
va_list arg;//创建名为 arg的列表
va_start(arg, format);//从format开始
vsprintf(String, format, arg);//sprintf 在这里 要写成 vsprintf
va_end(arg);//释放名为arg的列表
Usart1_SendString(String);
}
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "usart.h"
uint8_t Data ;
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
OLED_Init();
Usart_Init();
while(1)
{
// if(USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == SET)//接收数据完成标志 RXNE == 1表示数据接收完成
// {
// Data = USART_ReceiveData(USART1);
// OLED_ShowHexNum(1,1,Data,2);
// }
}
}
USART 库函数
Table 1. USART 库函数
| 函数名 | 描述 |
|---|---|
| USART_DeInit | 将外设 USARTx 寄存器重设为缺省值 |
| USART_Init | 根据 USART_InitStruct 中指定的参数初始化外设 USARTx 寄存器 |
| USART_StructInit | 把 USART_InitStruct 中的每一个参数按缺省值填入 |
| USART_Cmd | 使能或者失能 USART 外设 |
| USART_ITConfig | 使能或者失能指定的 USART 中断 |
| USART_DMACmd | 使能或者失能指定 USART 的 DMA 请求 |
| USART_SetAddress | 设置 USART 节点的地址 |
| USART_WakeUpConfig | 选择 USART 的唤醒方式 |
| USART_ReceiverWakeUpCmd | 检查 USART 是否处于静默模式 |
| USART_LINBreakDetectLengthConfig | 设置 USART LIN 中断检测长度 |
| USART_LINCmd | 使能或者失能 USARTx 的 LIN 模式 |
| USART_SendData | 通过外设 USARTx 发送单个数据 |
| USART_ReceiveData | 返回 USARTx 近接收到的数据 |
| USART_SendBreak | 发送中断字 |
| USART_SetGuardTime | 设置指定的 USART 保护时间 |
| USART_SetPrescaler | 设置 USART 时钟预分频 |
| USART_SmartCardCmd | 使能或者失能指定 USART 的智能卡模式 |
| USART_SmartCardNackCmd | 使能或者失能 NACK 传输 |
| USART_HalfDuplexCmd | 使能或者失能 USART 半双工模式 |
| USART_IrDAConfig | 设置 USART IrDA 模式 |
| USART_IrDACmd | 使能或者失能 USART IrDA 模式 |
| USART_GetFlagStatus | 检查指定的 USART 标志位设置与否 |
| USART_ClearFlag | 清除 USARTx 的待处理标志位 |
| USART_GetITStatus | 检查指定的 USART 中断发生与否 |
| USART_ClearITPendingBit | 清除 USARTx 的中断待处理位 |
函数 USART_Init
Table 2. 函数 USART_Init
| 函数名 | USART_Init |
|---|---|
| 函数原形 | void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct) |
| 功能描述 | 根据 USART_InitStruct 中指定的参数初始化外设 USARTx 寄存器 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | USART_InitStruct:指向结构 USART_InitTypeDef 的指针,包含了外设 USART 的配置信息。参阅 Section:USART_InitTypeDef 查阅更多该参数允许取值范围 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
结构体 USART_InitTypeDef structure
//USART_InitTypeDef 定义于文件“stm32f10x_usart.h”:
typedef struct
{
u32 USART_BaudRate;
u16 USART_WordLength;
u16 USART_StopBits;
u16 USART_Parity;
u16 USART_HardwareFlowControl;
u16 USART_Mode;
u16 USART_Clock;
u16 USART_CPOL;
u16 USART_CPHA;
u16 USART_LastBit;
} USART_InitTypeDef;
Table 3. 描述了结构 USART_InitTypeDef 在同步和异步模式下使用的不同成员。
Table 708. USART_InitTypeDef 成员 USART 模式对比
| 成员 | 异步模式 | 同步模式 |
|---|---|---|
| USART_BaudRate | √ | √ |
| USART_WordLength | √ | √ |
| USART_StopBits | √ | √ |
| USART_Parity | √ | √ |
| USART_HardwareFlowControl | √ | √ |
| USART_Mode | √ | √ |
| USART_Clock | √ | |
| USART_CPOL | √ | |
| USART_CPHA | √ | |
| USART_LastBit | √ |
参数 USART_BaudRate
该成员设置了 USART 传输的波特率,波特率可以由以下公式计算:
IntegerDivider = ((APBClock) / (16 * (USART_InitStruct->USART_BaudRate)))
FractionalDivider = ((IntegerDivider - ((u32) IntegerDivider)) * 16) + 0.5
参数 USART_WordLength
USART_WordLength 提示了在一个帧中传输或者接收到的数据位数。Table 709. 给出了该参数可取的值。
Table 4. USART_WordLength 定义
| USART_WordLength | 描述 | |
|---|---|---|
| USART_WordLength_8b | 8 位数据 | |
| USART_WordLength_9b | 9 位数据 |
参数 USART_StopBits
USART_StopBits 定义了发送的停止位数目。Table 710. 给出了该参数可取的值。
Table 5. USART_StopBits 定义
| USART_StopBits | 描述 |
|---|---|
| USART_StopBits_1 | 在帧结尾传输 1 个停止位 |
| USART_StopBits_0.5 | 在帧结尾传输 0.5 个停止位 |
| USART_StopBits_2 | 在帧结尾传输 2 个停止位 |
| USART_StopBits_1.5 | 在帧结尾传输 1.5 个停止位 |
参数 USART_Parity
USART_Parity 定义了奇偶模式。Table 711. 给出了该参数可取的值。
Table 6. USART_Parity 定义
| USART_Parity | 描述 | |
|---|---|---|
| USART_Parity_No | 奇偶失能 | |
| USART_Parity_Even | 偶模式 | |
| USART_Parity_Odd | 奇模式 |
注意:奇偶校验一旦使能,在发送数据的 MSB 位插入经计算的奇偶位(字长 9 位时的第 9 位,字长 8 位时的第 8 位)。
参数 USART_HardwareFlowControl
USART_HardwareFlowControl 指定了硬件流控制模式使能还是失能。Table 712. 给出了该参数可取的值。
Table 7. USART_HardwareFlowControl 定义
| USART_HardwareFlowControl | 描述 |
|---|---|
| USART_HardwareFlowControl_None | 硬件流控制失能 |
| USART_HardwareFlowControl_RTS | 发送请求 RTS 使能 |
| USART_HardwareFlowControl_CTS | 清除发送 CTS 使能 |
| USART_HardwareFlowControl_RTS_CTS | RTS 和 CTS 使能 |
参数 USART_Mode
USART_Mode 指定了使能或者失能发送和接收模式。Table 713. 给出了该参数可取的值。
Table 8. USART_Mode 定义
| USART_Mode | 描述 | |
|---|---|---|
| USART_Mode_Tx | 发送使能 | |
| USART_Mode_Rx | 接收使能 |
例:
/* The following example illustrates how to configure the USART1 */
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600; //波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //数据帧长度
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位
USART_InitStructure.USART_Parity = USART_Parity_NO; //检验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; //模式
USART_Init(USART1, &USART_InitStructure);
函数 USART_Cmd
Table 9. 函数 USART_ Cmd
| 函数名 | USART_ Cmd |
|---|---|
| 函数原形 | void USART_Cmd(USART_TypeDef* USARTx, FunctionalState NewState) |
| 功能描述 | 使能或者失能 USART 外设 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | NewState: 外设 USARTx 的新状态这个参数可以取:ENABLE 或者 DISABLE |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
例:
/* Enable the USART1 */
USART_Cmd(USART1, ENABLE);
函数 USART_ITConfig
Table 10. 函数 USART_ITConfig
| 函数名 | USART_ITConfig |
|---|---|
| 函数原形 | void USART_ITConfig(USART_TypeDef* USARTx, u16 USART_IT, FunctionalState NewState) |
| 功能描述 | 使能或者失能指定的 USART 中断 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | USART_IT:待使能或者失能的 USART 中断源参阅 Section:USART_IT 查阅更多该参数允许取值范围 |
| 输入参数 3 | NewState:USARTx 中断的新状态这个参数可以取:ENABLE 或者 DISABLE |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
参数 USART_IT
输入参数 USART_IT 使能或者失能 USART 的中断。可以取下表的一个或者多个取值的组合作为该参数的值。
Table 11. USART_IT 值
| USART_IT | 描述 | |
|---|---|---|
| USART_IT_PE | 奇偶错误中断 | |
| USART_IT_TXE | 发送中断 | |
| USART_IT_TC | 传输完成中断 | |
| USART_IT_RXNE | 接收中断 | |
| USART_IT_IDLE | 空闲总线中断 | |
| USART_IT_LBD | LIN 中断检测中断 | |
| USART_IT_CTS | CTS 中断 | |
| USART_IT_ERR | 错误中断 |
例:
/* Enables the USART1 transmit interrupt */
USART_ITConfig(USART1, USART_IT_RXNE,ENABLE);
函数 USART_SendData
Table 12. 函数 USART_ SendData
| 函数名 | USART_ SendData |
|---|---|
| 函数原形 | void USART_SendData(USART_TypeDef* USARTx, u8 Data) |
| 功能描述 | 通过外设 USARTx 发送单个数据 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | Data: 待发送的数据 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
例:
/* Send one HalfWord on USART3 */
USART_SendData(USART3, 0x26);
函数 USART_ReceiveData
Table 13. 函数 USART_ReceiveData
| 函数名 | USART_ ReceiveData |
|---|---|
| 函数原形 | u8 USART_ReceiveData(USART_TypeDef* USARTx) |
| 功能描述 | 返回 USARTx 近接收到的数据 |
| 输入参数 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输出参数 | 无 |
| 返回值 | 接收到的字 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
例:
/* Receive one halfword on USART2 */
u16 RxData;
RxData = USART_ReceiveData(USART2);
函数 USART_GetFlagStatus
Table 14. 函数 USART_ GetFlagStatus
| 函数名 | USART_ GetFlagStatus |
|---|---|
| 函数原形 | FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, u16 USART_FLAG) |
| 功能描述 | 检查指定的 USART 标志位设置与否 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | USART_FLAG:待检查的 USART 标志位参阅 Section:USART_FLAG 查阅更多该参数允许取值范围 |
| 输出参数 | 无 |
| 返回值 | USART_FLAG 的新状态(SET 或者 RESET) |
| 先决条件 | 无 |
| 被调用函数 | 无 |
USART_FLAG
Table 15. 给出了所有可以被函数USART_ GetFlagStatus检查的标志位列表
Table 15. USART_FLAG 值
| USART_FLAG | 描述 |
|---|---|
| USART_FLAG_CTS | CTS 标志位 |
| USART_FLAG_LBD | LIN 中断检测标志位 |
| USART_FLAG_TXE | 发送数据寄存器空标志位 |
| USART_FLAG_TC | 发送完成标志位 |
| USART_FLAG_RXNE | 接收数据寄存器非空标志位 |
| USART_FLAG_IDLE | 空闲总线标志位 |
| USART_FLAG_ORE | 溢出错误标志位 |
| USART_FLAG_NE | 噪声错误标志位 |
| USART_FLAG_FE | 帧错误标志位 |
| USART_FLAG_PE | 奇偶错误标志位 |
例:
/* Check if the transmit data register is full or not */
FlagStatus Status;
Status = USART_GetFlagStatus(USART1, USART_FLAG_TXE);
函数 USART_ClearFlag
Table 16. 函数 USART_ ClearFlag
| 函数名 | USART_ ClearFlag |
|---|---|
| 函数原形 | void USART_ClearFlag(USART_TypeDef* USARTx, u16 USART_FLAG) |
| 功能描述 | 清除 USARTx 的待处理标志位 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | USART_FLAG:待清除的 USART 标志位参阅 Section:USART_FLAG 查阅更多该参数允许取值范围 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
例:
/* Clear Overrun error flag */
USART_ClearFlag(USART1,USART_FLAG_OR);
函数 USART_GetITStatus
Table 17. 函数 USART_ GetITStatus
| 函数名 | USART_ GetITStatus |
|---|---|
| 函数原形 | ITStatus USART_GetITStatus(USART_TypeDef* USARTx, u16 USART_IT) |
| 功能描述 | 检查指定的 USART 中断发生与否 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | USART_IT:待检查的 USART 中断源参阅 Section:USART_IT 查阅更多该参数允许取值范围 |
| 输出参数 | 无 |
| 返回值 | USART_IT 的新状态 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
参数 USART_IT
Table 18. 给出了所有可以被函数USART_ GetITStatus检查的中断标志位列表
Table 18. USART_IT 值
| USART_IT | 描述 | |
|---|---|---|
| USART_IT_PE | 奇偶错误中断 | |
| USART_IT_TXE | 发送中断 | |
| USART_IT_TC | 发送完成中断 | |
| USART_IT_RXNE | 接收中断 | |
| USART_IT_IDLE | 空闲总线中断 | |
| USART_IT_LBD | LIN 中断探测中断 | |
| USART_IT_CTS | CTS 中断 | |
| USART_IT_ORE | 溢出错误中断 | |
| USART_IT_NE | 噪音错误中断 | |
| USART_IT_FE | 帧错误中断 |
例:
/* Get the USART1 Overrun Error interrupt status */
ITStatus ErrorITStatus;
ErrorITStatus = USART_GetITStatus(USART1, USART_IT_OverrunError);
函数 USART_ClearITPendingBit
Table 19. 描述了函数USART_ ClearITPendingBit
Table 19. 函数 USART_ ClearITPendingBit
| 函数名 | USART_ ClearITPendingBit |
|---|---|
| 函数原形 | void USART_ClearITPendingBit(USART_TypeDef* USARTx, u16 USART_IT) |
| 功能描述 | 清除 USARTx 的中断待处理位 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | USART_IT:待检查的 USART 中断源参阅 Section:USART_IT 查阅更多该参数允许取值范围 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
例:
/* Clear the Overrun Error interrupt pending bit */
USART_ClearITPendingBit(USART1,USART_IT_OverrunError);

 浙公网安备 33010602011771号
浙公网安备 33010602011771号