对机载雷达杂波的仿真代码
对机载雷达杂波的仿真,当然考虑了最简单的情况,正侧视阵,没有考虑模糊、阵元误差、杂波起伏等等因素,仿真出杂波数据,然后画出功率谱图、特征谱图以及距离多普勒图。
程序如下:
%硕士期间的杂波仿真,准确地说是杂波+干扰
%先产生噪声背景下的干扰,再考虑机载雷达的情况,将杂波考虑进去.主瓣方向为theta=90°,phi=1°
% 统一时域卷积空域
clc;
clear all;
close all;
%% 参数设置
%-- --系统参数------
Pt=230e3; %峰值发射功率
lamda=0.23; %工作波长
fr=2434.8; %重频
B=5e6; %接收机带宽
F=3; %噪声系数dB
tao=15e-6; %脉冲宽度
K=16; %相参脉冲数
sigma2=1; %噪声功率 w
k1=1.38e-23; %玻尔兹曼常数
T=290; %温度
c=3e8; %光速
Ls=10^0.4; %接收机损耗
%-----天线参数-----
%阵元采用余弦方向图
Gel=4; %阵元增益dB
M=4; %列向阵元数,
N=16; %子阵数
d=lamda/2; %阵元间距
%------载机参数----
H=8000; %载机高度
v=140; %载机速度
%------主瓣指向----
theta=90;
phi=1; %目标俯视角,方位角为theta,锥角为psi 主瓣方向俯仰角1° 列向合成存在相位误差,需要补偿
%------杂波参数----
gamma=-3; %归一化散射系数dB
theta_c=(0:359)*(pi/180); %杂波块个数为360
N_RangeSample = 2000; %距离采样数 看似是人为计算,实际上是计算出来的,一个不模糊区间的距离门个数Ru/deltaR
Nc=360;
deltaTheta = 2*pi/Nc; %方位分辨率/rad
open_phasecompensation_c=exp(-1i*2*pi*d/lamda*sin(1*pi/180)*(0:M-1)); %杂波(俯仰)相位补偿算子
open_phasecompensation_c=open_phasecompensation_c/norm(open_phasecompensation_c);
Mtx_synthesisoperator_c=kron(eye(N),open_phasecompensation_c); %杂波俯仰合成算子
%% ------------目标生成------------
ksi_t=10^(3/10); %信噪比3db
a=exp(1i*2*pi*(0:N-1)'*0);
b=exp(1i*2*pi*(0:K-1)'*0.3); %2*vt/(lamda*fr)
Xt=sqrt(sigma2*ksi_t/2)*kron(b,a);
%% -----------干扰生成--------------
Sj=1e-3; %干扰机的有效辐射功率密度(W/Hz) 1000
R_j=150e3; %干扰源所在斜距,考虑干扰源在地面 150km
phi_j=asin(H/R_j); %干扰源的俯仰角
Fr_j=sum(exp(1i*2*pi*d/lamda*(0:M-1).'*(sin(phi_j)-sin(1*pi/180)))); %干扰的接收方向图 .*Fe_j?
Fr_j=Fr_j/max(max(Fr_j));
Gr_j=M*(10^(Gel/10))*(abs(Fr_j)).^2; %干扰的接收增益
S_j=exp(1i*2*pi*(0:N-1)'*0.05); %16*1
J0=Sj*Gr_j*lamda^2/((4*pi)^2*R_j^2*Ls); %干扰功率
ksi_j=J0/(k1*T*10^(F/10)); %干噪比 分母原本乘了一个B,陈师兄
%% ------------杂波生成----------------
Ru=c/(2*fr); %最大不模糊距离约为61.6公里
d0=4.12*(sqrt(H)+0)*1000; %雷达视距 368.5km
fs = 2.5e6;
deltaR = c/(2*B); % 距离分辨率m 30m
Re = 8.49e6; %地球曲率半径km
Ft_c= zeros(1,Nc); %发射方向图
Fr_c= zeros(1,Nc); %接收方向图
Xcjn=zeros(N*K,N_RangeSample); %杂波+干扰接收数据
Xcn=zeros(N*K,N_RangeSample); %杂波接收数据
S_c=zeros(N*K,Nc);
Gt_c=zeros(1,Nc); %发射增益
Gr_c=zeros(1,Nc); %接收增益
rcjn=zeros(N*K);
rcn=zeros(N*K);
Xc=zeros(N*K,N_RangeSample);
Rc_real=zeros(N*K);
Rcjn_real=zeros(N*K);
for l = 1:N_RangeSample %距离采样遍历
Rcell = (l-1)*deltaR;
for m=3 %对于第三个模糊区间 150km
Rc =(m-1)*Ru + Rcell; %不同模糊区间的杂波距离 (m-1)*Ru + Rcell
if Rc>=H && Rc<= d0
sin_psi = (2*H*Re+H^2-Rc^2)/2/Rc/Re; %擦地角 若不严格考虑擦地角而将俯仰角视为擦地角,最终无法得出结果!!!!
if sin_psi>0 && (1-sin_psi)>(1e-10)
phi_c=asin(-(2*H*Re+H^2+Rc^2)/2/Rc/(Re+H)); %杂波俯仰角
psi_c=acos(cos(theta_c)*cos(phi_c)); %计算锥角
cos_psi = sqrt(1-sin_psi^2); %擦地角余弦
Fe_c=abs(cos(theta_c+90*pi/180)); %阵元方向图采用余弦方向图
Ft_c=sum(exp(1i*2*pi*d/lamda*(0:N-1).'*(cos(psi_c)-cos(90*pi/180)*cos(1*pi/180))))*sum(exp(1i*2*pi*d/lamda*(0:M-1)'*(sin(phi_c)-sin(1*pi/180)))).*Fe_c; %整个阵面总的发射方向图
Fr_c=sum(exp(1i*2*pi*d/lamda*(0:M-1).'*(sin(phi_c)-sin(1*pi/180)))).*Fe_c;
Ft_c=Ft_c/max(max(Ft_c));
Fr_c=Fr_c/max(max(Fr_c));
Gt_c=M*N*(10^(Gel/10))*(abs(Ft_c)).^2;
Gr_c=M*(10^(Gel/10))*(abs(Fr_c)).^2;
sigma0=10^(gamma/10)*sin_psi; %散射系数,等gama模型
% ClutterPatchArea = Rc*deltaTheta*deltaR/cos_psi;
% sigma = sigma0*ClutterPatchArea;
Ag=c*tao/2*1/cos_psi*Rc*sin(1/360*2*pi); %杂波块的地面可分辨面积 长*宽
ksi_c=sqrt((Pt*B*tao*Gt_c.*Gr_c*lamda^2*Ag*sigma0)/((4*pi)^3*Rc^4*k1*T*B*10^(F/10)*Ls)); %杂噪比
fd_c=2*cos(phi_c)*cos(theta_c)*v/(lamda*fr);
St_c=exp(1i*(0:K-1)'*2*pi*fd_c); %时域导向矢量
fs_cn=cos(phi_c)*cos(theta_c)*2*pi*d/lamda;
fs_cm=sin(phi_c)*2*pi*d/lamda;
Ss_c=(ones(N,1)*ksi_c).*(Mtx_synthesisoperator_c*kron(exp(1i*(0:N-1)'*fs_cn),exp(1i*(0:M-1)'*fs_cm))); %空域导向矢量,面阵的导向矢量与线阵不同
for i=1:Nc
S_c(:,i)=kron(St_c(:,i),Ss_c(:,i)); %时域卷积空域 NK*360
end
if l == 1000
Rc_real = S_c*S_c'; %每一个距离门上真实(理论)的Rc
end
Xc(:,l)=S_c*(rand(1,Nc)+1i*randn(1,Nc))'; %每一个距离采样点上的杂波数据
Xn=sqrt(sigma2/2)*(randn(N*K,1)+1i*randn(N*K,1)); %Xn=wgn(N*K,1,0) 0db是统计意义上的值,在非大样本情况下实际功率不是0db
% Xjt=sqrt(sigma2*ksi_j/2)*(randn(K,1)+1i*randn(K,1)); %干扰的时域数据,全多普勒域
% if l>=1000&&l<1200
Xj=sqrt(sigma2*ksi_j/2).*kron((randn(K,1)+1i*randn(K,1)),S_j); % 时域卷积空域
% else
% Xj=zeros(N*K,1);
% end
Xcjn(:,l) = Xcjn(:,l)+Xc(:,l)+Xn+Xj; %第l个距离单元的空时快拍数据 256*1
Xcn(:,l) = Xcn(:,l)+Xc(:,l)+Xn;
end
end
end
end
%% 画图
Rcjn_real=Rc_real+Xj*Xj'+eye(N*K);
Rcn_real=Rc_real+eye(N*K);
for p=1:3*N*K %用3NK个样本来进行估计
rcjn=rcjn+Xcjn(:,p)*Xcjn(:,p)'; %+eye(N*K)
rcn=rcn+Xcn(:,p)*Xcn(:,p)';
end
Rcjn=rcjn/(3*N*K); %估计值
Rcn=rcn/(3*N*K);
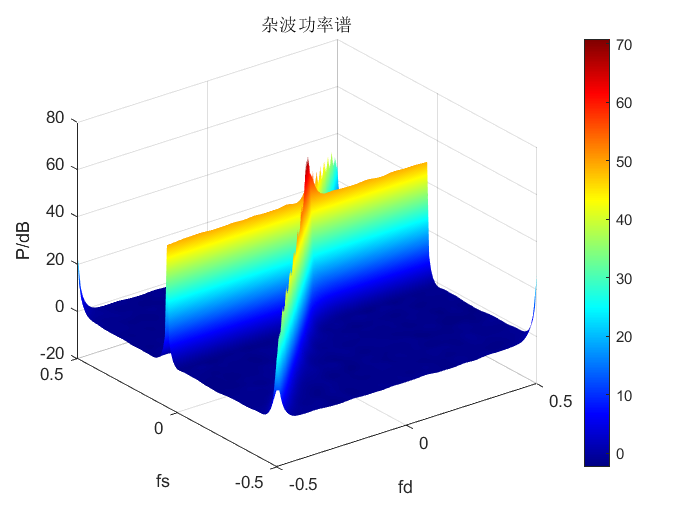
%计算杂波功率谱P并绘图
fs_num=101;
fd_num=101;
fs_n=linspace(-0.5,0.5,fs_num);
fd_n=linspace(-0.5,0.5,fd_num);
Rcjn_inv=inv(Rcjn);
P=zeros(fd_num,fs_num);
for i=1:fd_num
St=exp(1i*(0:K-1)'*2*pi*fd_n(i));
for j=1:fs_num
Ss=exp(1i*(0:N-1)'*2*pi*fs_n(j)); %此处虚数原先用j,混淆了。。
S=kron(St,Ss); %先时域再空域!!!!
S=S/norm(S); %归一化使噪声为功率在图中显示为零
P(j,i)=10*log10(abs(1/(S'*Rcjn_inv*S)));
end
end
figure(1);
colormap(jet);
surf(fd_n,fs_n,P);
shading interp;lighting gouraud;colorbar;
title('杂波功率谱');xlabel('fd');ylabel('fs');zlabel('P/dB');hold on; %绘制杂波功率谱图
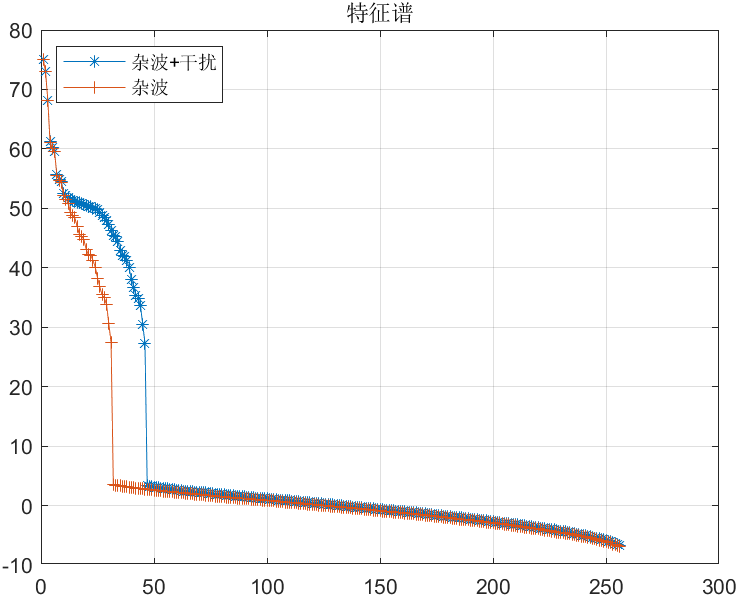
%特征谱图
EigVal = eig(Rcjn);
EigVal = db(sort(abs(EigVal),'descend'))/2;
EigVal2 = eig(Rcn);
EigVal2 = db(sort(abs(EigVal2),'descend'))/2;
figure(2);
plot(EigVal','*-');
title('特征谱');
grid on;
hold on
plot(EigVal2','+-');
legend('杂波+干扰','杂波','Location','NorthWest');
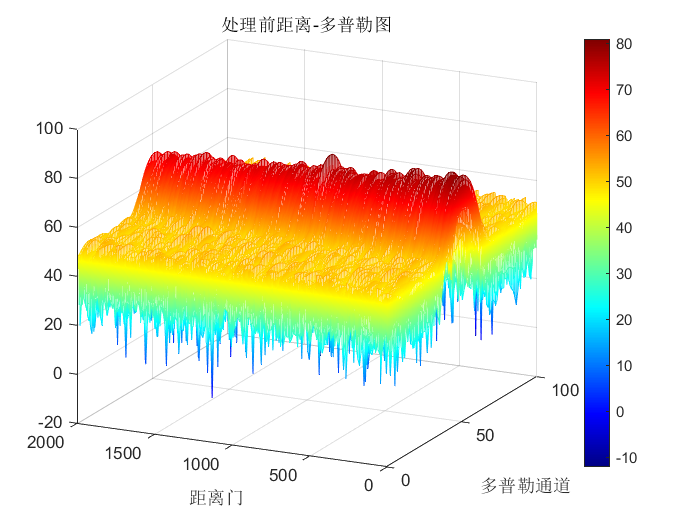
%距离多普勒图
%先对每个阵元接收数据做DFT,后空域合成
clutter_echo_matrix = zeros(N,K,N_RangeSample);
Vec_Qs = chebwin(N,60).'; %
Vec_Qs = Vec_Qs/(sqrt(Vec_Qs*Vec_Qs')); %归一化的空域
u_s = Vec_Qs; %1*N的空域合成算子
Vec_Qt = chebwin(K,60).'; %1*K
Vec_Qt = Vec_Qt/(sqrt(Vec_Qt*Vec_Qt'));
fd_t=-0.5:0.01:0.49; %(-K/2:K/2-1)/K;
fdata = zeros(N,100,N_RangeSample);
fdata2 = zeros(100,N_RangeSample);
for l=1:N_RangeSample
clutter_echo_matrix(:,:,l)=reshape(Xcjn(:,l),N,K); %NK*L矩阵变维为N*K*L
for n = 1:N %先对每个阵元数据进行DFT,得到每个阵元数据仍为1*K(频域)
fdata(n,:,l)=(Vec_Qt.*clutter_echo_matrix(n,:,l)*exp(1i*2*pi*(0:K-1).'*fd_t)); %(1*K).*(1*K)*(K*K)第l个距离门中第n个阵元进行DFT处理以后的回波数据,exp(j*2*pi*(0:K-1).'*fd))为DFT权值
end
fdata2(:,l) = u_s*fdata(:,:,l); %第l个距离门中对每个阵元数据进行DFT后再用空域合成算子进行空域合成
end
x=1:length(fd_t); %1:size(fdata2,1)
y=1:N_RangeSample; %1:size(fdata2,2)
figure(2);colormap(jet);
mesh(x,y,20*log10(abs(fdata2.')));
shading interp;
lighting gouraud;colorbar;
title('处理前距离-多普勒图');
% axis([1 length(fd_t) 1 N_RangeSample]);
xlabel('多普勒通道');ylabel('距离门');
下面是程序作的三张图:
1.功率谱图

 浙公网安备 33010602011771号
浙公网安备 33010602011771号