线段树(合集)
0. 树?睡蕉小猴!
因为以前的线段树写成了好几个 blog,所以这里写一个合集。
1. 线段树
1.1 线段树 1
线段树是用来处理一类“区间修改+区间操作”的问题的数据结构。
1.2 线段树的节点与性质
建立一棵二叉树,根节点为 ,每个节点会处理一个区间 的和,比如根节点会处理 。
由二叉树,我们知道节点 的两个儿子是 和 。
定义 。
规定:若 对应的区间为 (以下不再写“对应的区间”),定义 ,则 对应区间 , 对应区间 。
定义: 是叶子节点。
那么线段树到底长成了什么样子呢?如图:
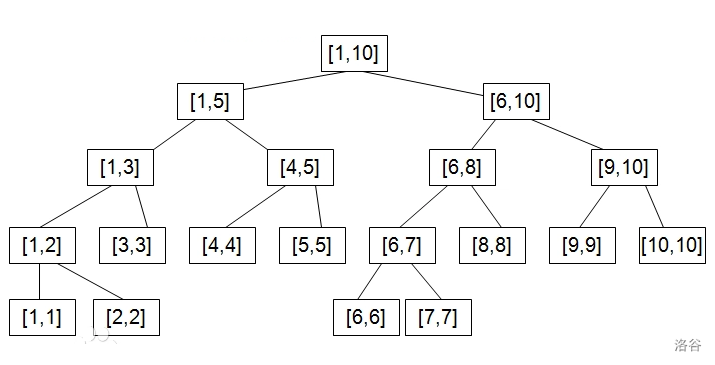
观察线段树:
- 每个点要么有 个子结点,有么为根。
- 有 个节点。
- 高为 。
1.3 建立一颗线段树
有一个显然的性质,。
那么定义合并函数 pushup(int u):
void pushup(int u)
{
w[u]=w[u*2]+w[u*2+1];
}那怎么对于一个序列 建立一颗线段树呢?直接上代码:
void build(int u,int l,int r)
{
if(l==r)
{
w[u]=a[l];
return;
}
int mid=(l+r)/2;
build(u*2,l,mid);
build(u*2+1,mid+1,r);
pushup(u);
}代码很好理解。
1.4 区间查询
我们知道查询区间为 。我们可以想到,如果 属于 ,则直接返回当前区间和。如果完全没有交集,可以直接返回 。不然,分成两部分去查找。
代码如下:
bool InRange(int L,int R,int l,int r)
{
return (l<=L)&&(R<=r);
}
bool OutofRange(int L,int R,int l,int r)
{
return (L>r)||(R<l);
}
long long query(int u,int L,int R,int L,int r)
{
if(InRange(L,R,l,r)) return w[u];
else if(!OutofRange(L,R,l,r))
{
int m=(L+R)/2;
return query(u*2,L,m,l,r)+query(u*2+1,m+1,R,l,r);
}
else return 0;
}1.5 懒标记与区间查询
定义:懒标记()是用来记录区间修改的信息的一个标记,比如下面这个例子:
一个班的学习委员知道语文作业后,不用立即告诉下面的组长们,可以再等一下数学作业。(修改时不直接下方标记)
懒标记具有可合并性,比如语文 张试卷,数学 张试卷,那么总共 张试卷。
如果老师问学习委员作业写完没有,只需要自己写完即可。(不涉及叶子节点不下方标记)
知道所有作业后也不需要立刻告诉大家,老师收作业时再告诉大家即可。(查询叶子节点下方懒标记)
那么区间修改和区间查询可以这么写:
void maketag(int u,int len,long long x)
{
lzy[u]+=x;
w[u]+=len*x;
}
void pushdown(int u,int l,int r)
{
int m=(l+r)/2;
maketag(u*2,m-l+1,lzy[u]);
maketag(u*2+1,r-m,lzy[u]);
lzy[u]=0;
}
void update(int u,int L,int R,int l,int r,long long x)
{
if(InRange(L,R,l,r)) maketag(u,R-L+1,x);
else if(!OutofRange(L,R,l,r))
{
int m=(L+R)/2;
pushdown(u,L,R);
update(u*2,L,m,l,r,x);
update(u*2+1,m+1,R,l,r,x);
pushup(u);
}
}
long long query(int u,int L,int R,int l,int r)
{
if(InRange(L,R,l,r)) return w[u];
else if(!OutofRange(L,R,l,r))
{
int m=(L+R)/2;
pushdown(u,L,R);
return query(u*2,L,m,l,r)+query(u*2+1,m+1,R,l,r);
}
else return 0;
}1.6 封装线段树
初学阶段千万不要复制,等你自己能在至多 把线段树默写出来再复制。
const int maxn=500006;//依情况修改
struct Segment{//依情况修改
long long a[maxn],w[4*maxn],lzy[4*maxn];
void pushup(int u)
{
w[u]=w[u*2]+w[u*2+1];
}
void build(int u=1,int l=1,int r=n)
{
if(l==r)
{
w[u]=a[l];
return;
}
int m=(l+r)/2;
build(u*2,l,m),build(u*2+1,m+1,r);
pushup(u);
}
bool InRange(int L,int R,int l,int r)
{
return (l<=L)&&(R<=r);
}
bool OutofRange(int L,int R,int l,int r)
{
return (L>r)||(R<l);
}
void maketag(int u,int len,long long x)
{
lzy[u]+=x;
w[u]+=len*x;
}
void pushdown(int u,int l,int r)
{
int m=(l+r)/2;
maketag(u*2,m-l+1,lzy[u]);
maketag(u*2+1,r-m,lzy[u]);
lzy[u]=0;
}
int query(int l,int r,int u=1,int L=1,int R=n)
{
if(InRange(L,R,l,r)) return w[u];
else if(!OutofRange(L,R,l,r))
{
int m=(L+R)/2;
pushdown(u,L,R);
return query(l,r,u*2,L,m)+query(l,r,u*2+1,m+1,R);
}
else return 0;
}
void update(int l,int r,long long x,int u=1,int L=1,int R=n)
{
if(InRange(L,R,l,r)) maketag(u,R-L+1,x);
else if(!OutofRange(L,R,l,r))
{
int m=(L+R)/2;
pushdown(u,L,R);
update(l,r,x,u*2,L,m);
update(l,r,x,u*2+1,m+1,R);
pushup(u);
}
}
};定义:Segment a;
使用:构造 a.build(),区间修改 a.update(x,y,k),区间查询 a.query(x,y)。其中, 为区间, 为修改值。注意有些函数的值顺序改了一下,记得调回来。此份代码是求区间和的代码。
1.7 开关
这里很简单,区间异或就是将 和 互换。所以稍微变动一下 函数便可:
void maketag(int u,int len,long long x)
{
lzy[u]^=1;
w[u]=len-w[u];
}1.8 线段树适用范围
可以发现,线段树一定可以从 和 转化而来,也就是满足“分配率”。
比如区间众数便不能由线段树维护。而区间异或,区间 GCD 都可以用线段树维护。
1.9 线段树 2/多标记处理
这题需要建立两个标记:加法标记和乘法标记。
这时候需要注意标记下方顺序。
详见此题题解。
1.10 复杂度分析
空间复杂度 。
时间复杂度:建树 ,单次操作 。
2. 动态开点线段树
这是线段树最简单的拓展。
请在理解完线段树后再来看此节。
2.1 适用范围
当操作区间很大()甚至出现负数()的时候,就需要用到动态开点线段树。
2.2 动态开点的本质
观察线段树,单次操作最多使用的点为 的。
那么实际上整棵树最多使用的点为 的。
一般来说,,那么 左右。
所以动态开点只记录这些节点,最多只需要开 的节点个数左右。一般来说还需要加一点。
2.3 动态开点的实现 / 封装动态开点线段树
用一个 node 存储数据:
struct node{
int l,r,val,lzy;
node(){
l=r=val=lzy=0;
}
}tr[30*maxm];pushdown 操作时,除了更新 ,还要开新节点。
void pushdown(int u,int l,int r)
{
if(!tr[u].l) tr[u].l=++tot;
if(!tr[u].r) tr[u].r=++tot;
int mid=(l+r)/2;
maketag(tr[u].l,mid-l+1,tr[u].lzy);
maketag(tr[u].r,r-mid,tr[u].lzy);
tr[u].lzy=0;
}初始时只需要开一个根节点即可。其余操作类似。
#define maxm 500005
int n=2000000000;
struct dt_Segment_tree{
struct node{
int l,r,val,lzy;
node(){
l=r=val=lzy=0;
}
}tr[30*maxm];
int tot=0;
dt_Segment_tree(){
tot++;
}
void pushup(int u)
{
tr[u].val=tr[tr[u].l].val+tr[tr[u].r].val;
}
void maketag(int u,int len,int x)
{
tr[u].lzy+=x;
tr[u].val+=len*x;
}
void pushdown(int u,int l,int r)
{
if(!tr[u].l) tr[u].l=++tot;
if(!tr[u].r) tr[u].r=++tot;
int mid=(l+r)/2;
maketag(tr[u].l,mid-l+1,tr[u].lzy);
maketag(tr[u].r,r-mid,tr[u].lzy);
tr[u].lzy=0;
}
bool InRangeOf(int L,int R,int l,int r)
{
return (l<=L)&&(R<=r);
}
bool OutRangeOf(int L,int R,int l,int r)
{
return (L>r)||(R<l);
}
void update(int l,int r,int x,int u=1,int L=1,int R=n)
{
if(InRangeOf(L,R,l,r)) maketag(u,R-L+1,x);
else if(!OutRangeOf(L,R,l,r))
{
pushdown(u,L,R);
int mid=(L+R)>>1;
update(l,r,x,tr[u].l,L,mid);
update(l,r,x,tr[u].r,mid+1,R);
pushup(u);
}
}
int query(int l,int r,int u=1,int L=1,int R=n)
{
if(InRangeOf(L,R,l,r)) return tr[u].val;
else if(!OutRangeOf(L,R,l,r))
{
pushdown(u,L,R);
int mid=(L+R)>>1;
return query(l,r,tr[u].l,L,mid)+query(l,r,tr[u].r,mid+1,R);
}
else return 0;
}
}a;2.4 【模板】动态开点线段树
模板题,没什么说的。
3. 树套树
阅读本章前请先完成【模板】动态开点线段树。
3.1 什么是树套树
考虑这样一个问题:
- 在一个 的平面上,维护任意一个平面 的区间覆盖与区间查询。
这题不可以简单的二维树状数组,必须使用线段树。
3.2 线段树套线段树
最简单的树套树。
有一个暴力的想法:我们对于每一行开一个线段树。这样单次操作时间复杂度 。
那怎么优化呢?容易发现,对于每一行,我们也可以看成区间加。
那么建一颗线段树,每个线段树的结点都是一颗线段树,那么时间复杂度 。
但是如果直接这么建是 的,不仅常数大,而且 的空间复杂度可以 XXX 了。
考虑动态开点,这样每一次只会增加 个结点。
空间时间复杂度就都是 的了,非常优秀。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号