Paper | SkipNet: Learning Dynamic Routing in Convolutional Networks
SkipNet: Learning Dynamic Routing in Convolutional Networks
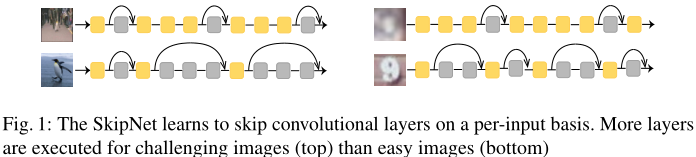
作者对residual network进行了改进:加入了gating network,基于上一层的激活值,得到一个二进制的决策0或1,从而继续推断或跳过下一个block。作者还提出了对应的训练方法,集成有监督学习和强化学习,从而克服了skipping不可差分的问题。
1. 概括
难点:skipping决策是不可差分的,那么就无法用基于梯度的优化方法进行学习。
-
[2,30,31]提出了软近似,但实验发现它们的精度很差。
We show that the subsequent hard thresholding required to reduce computation results in low accuracy.
-
[4,23]则提出用强化学习解决硬判决问题,但实验发现它们很脆弱,即精度也很差。
-
[16,21]还采用了reparametrization技术,但其中的松弛会引入估计误差,导致习得策略欠佳。
训练方法大致分为2步:
-
借助reparameterization和soft-max松弛,同时训练网络和门限。
-
取消松弛,借助强化学习,继续精炼skipping政策。
实验结果:在CIFAR-10、CIFAR-100、SVHN和ImageNet上,分别能降低50%、37%、86%和30%的计算量。并且,SkipNet也存在一个超参数,可以针对不同计算量约束进行调节。
2. 相关工作
为了实现模型压缩,大多数工作集中在参数稀疏化、滤波器剪枝,向量量化和蒸馏。这些方法的共同问题:
-
通常是后处理,即对已经训练好的网络执行的操作。
-
并不能根据输入动态调整网络。
还有一些工作[6,8,29]通过提前终止实现这一目标。其中[8]是暂停循环过程,[6]和[29]是提前终止CNN。但本文的SkipNet是跳过而不是提前终止。
还有一些工作[1,22,32]集成了不同计算复杂度的多个模型,并设计决策机制或终止机制。但是这样做严重浪费了存储,并且每个模型并不存在计算共享。
3. 方法细节
基本方法就是:在ResNet的基础上,加入了门限网络。其将上一层的输入映射至0或1,从而跳过或执行下一层。
注意:要求输入、输出的维度相同。而ResNet的块结构正好满足这一要求。或者要采用池化等操作。
门限模块的结构
作者尝试了三种结构:
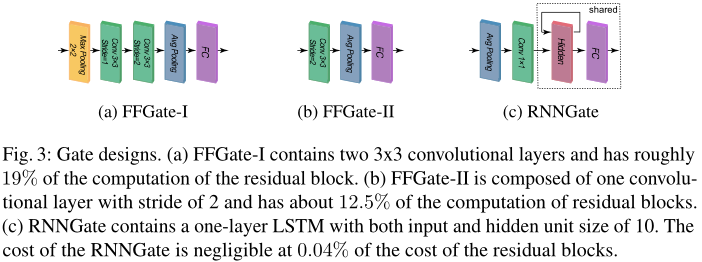
前两种都是CNN结构,第三种是RNN结构。第一种计算量大,作者只用于浅层网络;第二种计算量小,作者用于超过百层的网络。在后续实验中,作者发现循环网络效果最好,不仅计算量远小,而且精度也高。这归功于其时序学习能力。
训练方法
最简单直接的方法就是用softmax软化(例如Highway Networks),使得网络参数能够差分;而在推导(测试)时再用硬判决。但实验发现其精度很差,原因是其中存在误差。
作者决定在训练阶段保留硬判决。现在我们分析损失函数。假设第\(i\)层的输入是\(\mathbf{X}^i\),门模块是\(G^i(\mathbf{X}^i)\),判决结果是\(g_i\)。\(g_i = 1\)时,该层执行;\(g_i = 0\)时,该层被跳过(输入直接恒等映射至输出)。一共\(N\)层,则总判决为\(\mathbf{g} = \{0, 1\}^N\)。
假设网络每一层参数的集合(包括门模块)为:\(F_{\theta} = [F_{\theta}^1, ..., F_{\theta}^N]\)。在给定\(\mathbf{X}\)和\(\mathbf{g}\)的情况下,损失为:
前半部分应该是有监督学习中的保真度(fidelity)或者准确度指标之类的【作者没提】,后者惩罚的是计算量。其中\(C_i\)用来调节\(F_i\)的重要性【注意负号】,作者设恒为1。\(\alpha\)是权衡计算量和精度的超参数。
进一步,右半部分可以视为强化学习中的奖励(reward)。
我们的训练目标严格写是这样:
即:对训练集中的所有样本取统计平均(一般就是平权,因为假设i.i.d.),对所有可能的判决集结果取统计平均,并最终实现 最小化误差的同时 最小化计算量。二者相对重要性由\(\alpha\)调控。
我们也可以看看该训练目标函数的梯度。注意梯度是关于参数\(\theta\)的梯度:
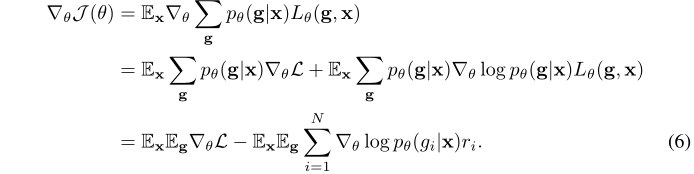
第二步的右半部分是这样的,熟悉RL的同学都很清楚:
对于最终结果,左半部分就可以看作监督学习损失函数的梯度,右半部分就可以看作强化学习损失的梯度。其中:
在实际操作中,我们降低对精度的要求,给前半部分加一个超参数:
作者设\(\beta = \frac{\alpha}{N}\)或1。
实际上,分两个部分分别训练是不完美的,但是一个折衷的处理方式。作者首先使用监督学习,让网络参数初步收敛。然后再采用强化学习。实验发现,如果直接将上式作为强化学习的激励,那么训练效果会很不好。原因可能是学习的策略过早收敛于垃圾特征。
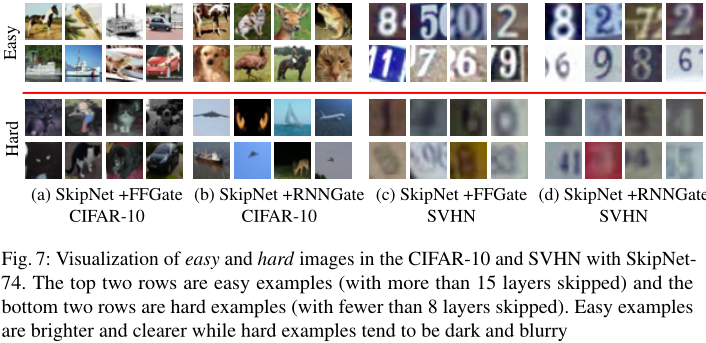
实验有几个有趣的发现:
-
简单的样本(跳过层数多)偏亮,清晰,对比度高:
-
越大尺度的图像平均需要块越多(可能因为感受野不够):
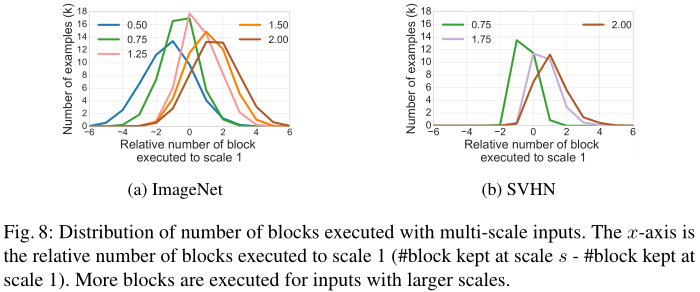
-
前面层和后面层被跳过比较频繁,中间层跳过率很低。
-
有监督预训练为强化学习提供了很好的起点。
-
在计算量相同的情况下,硬判决的精度远高于软判决。
4. 总结
优点:不同于提前退出,这种方法比较新。
不足:每一层或块的输入、输出维度必须相同,否则无法执行跳过判决(跳过或执行的输出维度必须得一致)。或者需要池化等额外操作。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号