Paper | Toward Convolutional Blind Denoising of Real Photographs
Toward Convolutional Blind Denoising of Real Photographs
发表在2019 CVPR。
摘要:
While deep convolutional neural networks (CNNs) have achieved impressive success in image denoising with additive white Gaussian noise (AWGN), their performance remains limited on real-world noisy photographs. The main reason is that their learned models are easy to overfit on the simplified AWGN model which deviates severely from the complicated real-world noise model. In order to improve the generalization ability of deep CNN denoisers, we suggest training a convolutional blind denoising network (CBDNet) with more realistic noise model and real-world noisy-clean image pairs. On the one hand, both signal-dependent noise and in-camera signal processing pipeline is considered to synthesize realistic noisy images. On the other hand, real-world noisy photographs and their nearly noise-free counterparts are also included to train our CBDNet. To further provide an interactive strategy to rectify denoising result conveniently, a noise estimation subnetwork with asymmetric learning to suppress under-estimation of noise level is embedded into CBDNet. Extensive experimental results on three datasets of real-world noisy photographs clearly demonstrate the superior performance of CBDNet over state-of-the-arts in terms ofquantitative metrics and visual quality. The code has been made available at https://github.com/GuoShi28/CBDNet.
结论:
We presented a CBDNet for blind denoising of realworld noisy photographs. The main findings of this work are two-fold. First, realistic noise model, including heterogenous Gaussian and ISP pipeline, is critical in making the learned model from synthetic images be applicable to real-world noisy photographs. Second, the denoising performance of a network can be boosted by incorporating both synthetic and real noisy images in training. Moreover, by introducing a noise estimation subnetwork into CBDNet, we were able to utilize asymmetric loss to improve its generalization ability to real-world noise, and perform interactive denoising conveniently.
要点:
-
现有的方法大多建立在AWGN上,在实际样本上效果不好。作者认为是AWGN模型太简单,过拟合了。
Existing CNN denoisers tend to be over-fitted to Gaussian noise and generalize poorly to real-world noisy images with more sophisticated noise.
-
作者对现实噪声尝试了建模,并且在训练集中加入了很多生成样本。包括:signal-dependent noise和in-camera signal processing pipeline。
-
CBDNet中包括了一个预测噪声的子网络。其训练采用的是非对称的loss,着重惩罚对噪声的低估(在FFDNet中我们看到,宁可高估噪声,不可低估噪声)。
贡献:
-
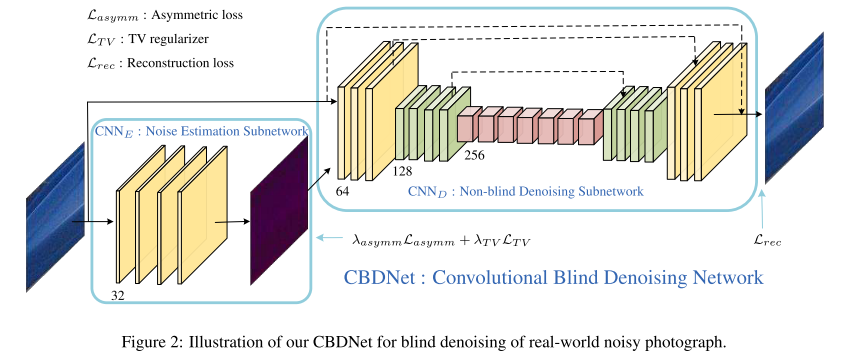
提出了一个盲去噪网络CBDNet,其中一个子网络用于预测噪声水平、输出噪声水平图,第二个子网络即完成非盲去噪。两个子网络的损失项合并起来,end-to-end训练。
-
在训练时混合了生成噪声和真实噪声。
局限:
- 能否有效地剥离噪声预测和盲去噪模块?作者通过真实噪声图(只有生成噪声才有)监督,以及TV平滑规范,强迫输出为平滑的噪声水平图。但真实效果(能否很好地独立)未知。
故事背景
在真实的相机系统(real camera system)中,图像噪声的来源多种多样,例如暗电流噪声(dark current noise)、短噪声(short noise)和热噪声(thermal noise)。进一步,图像还会在相机内部的处理流程(in-camera processing, ISP)中进一步加噪,例如去马赛克(demosaicing)、伽马校正(Gamma correction)和压缩(compression)。显然,这些噪声与简单的AWGN截然不同。
建模现实噪声
根据[14,45],泊松高斯分布(可近似为heteroscedastic Gaussian of a signal-dependent and a stationary noise components)更适用于建模真实噪声。此外还有相机内部的处理,使得噪声与空域位置和色彩有关(makes the noise spatially and chromatically correlated)。
具体而言,光成像(photon sensing)导致的噪声由泊松分布刻画,而其余的静态干扰由高斯分布刻画。
再进一步,我们可以用异方差的高斯分布近似:
Practically, the noise produced by photon sensing can be modeled as Poisson, while the remaining stationary disturbances can be modeled as Gaussian. Poisson-Gaussian thus provides a reasonable noise model for the raw data of imaging sensors [14], and can be further approximated with a heteroscedastic Gaussian.

ISP没看懂,见1714页。其考虑了相机响应函数CRF、RGB到拜耳图像的转换M、去马赛克函数DF、生成辐照图像的L以及JPEG压缩,但没有考虑量化噪声。JPEG量化系数QF和图像方差(泊松和高斯)都在一定范围内变化。
因此在本文中,我们同时考虑泊松-高斯模型和ISP(实验证明ISP很重要)。
具体而言,我们将生成噪声图像和真实噪声图像一起用于训练CBDNet。
CBDNet
-
CBDNet分为两个子网络:噪声预测网络CNN_E和非盲去噪网络CNN_D。
-
理想状况下,CNN_E将会输出噪声水平图,其大小与输入图像大小一样。噪声水平图和原输入一起,输入CNN_D,实现去噪。
-
噪声水平图在输入CNN_D之前,可以被人为地适当修改。作者设了一个乘子\(\gamma\),对噪声水平图进行点乘。
-
CNN_E是一个五层CNN,没有BN和池化。每一层都有32个通道,都是\(3 \times 3\)卷积。
-
CNN_D采用的是16层的U-Net结构。并且整体学习的是残差(头尾引入了短连接)。其中有大量的短连接、跨步卷积和转置卷积,可以捕捉多尺度信息,同时扩大感受野。所有滤波器都是\(3 \times 3\)的。除了最后一层,其余都使用ReLU非线性激活。
实验发现,BN对真实噪声的去除帮助微乎其微。可能的原因是真实噪声非高斯分布。
作者引入CNN_E的原因有两个:
-
可以通过调节噪声水平图,来调整去噪程度。
-
在FFDNet等工作中发现,引入噪声水平图可以达到更好的性能,特别是当噪声程度较大时。
非对称损失
比起低估噪声损失,我们更倾向于高估噪声损失。原因:
Both CNN and traditional non-blind denoisers perform robustly when the input noise SD. is higher than the ground-truth one (i.e., over-estimation error), which encourages us to adopt asymmetric loss for improving generalization ability of CBDNet.
并且在FFDNet中,作者也发现高估噪声几乎不会影响效果,但低估影响很严重。因此,作者在损失函数的设计上,更着重惩罚低估噪声。
此外,作者还引入了TV正则化项,保证预测噪声水平图的平滑性。
数据库
通过我们的建模,我们可以获得大量生成数据。具体而言,作者从多个数据集中获取了很多RGB图像,然后通过ISP的反变换,得到“干净、无损”的图像。然后再加噪甚至压缩。
但对于真实有噪图像,我们很难获得其无损图像。文献[43,45,1]说可以通过对同一场景的多张有噪图像取平均,但这样做很难:要保证静态,同时要有多张图像。因此作者也采取了上述方式?(作者没说清楚)数据库来源于[4]。
但当输入batch为真实有噪图像时,由于噪声标准差不可知,因此loss只衡量去噪保真项,不衡量噪声估计损失和正则项。
实验
有点可惜的是,作者没有探究decorrelation的程度,以及噪声预测的效率。作者通过这个实验,探究了互动性:
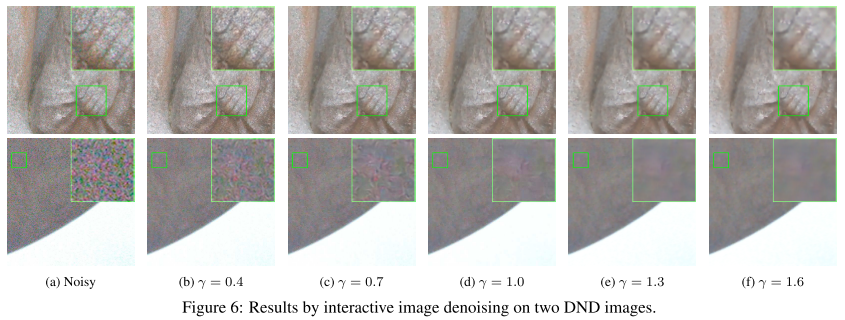
可见,随着噪声水平预测图放大系数的不断提高,去噪强度也在增强。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号