SE_Work2_交点个数
| 项目 | 内容 |
|---|---|
| 课程:北航-2020-春-软件工程 | 博客园班级博客 |
| 要求:求交点个数 | 个人项目作业 |
| 班级:005 | Sample |
| GitHub地址 | IntersectProject |
一、PSP估算
- 在开始实现程序之前,在下述 PSP 表格记录下你估计将在程序的各个模块的开发上耗费的时间。(0.5')
- 在你实现完程序之后,在下述 PSP 表格记录下你在程序的各个模块上实际花费的时间。(0.5')
| PSP2.1 | Personal Software Process Stages | 预估耗时(分钟) | 实际耗时(分钟) |
|---|---|---|---|
| Planning | 计划 | ||
| · Estimate | · 估计这个任务需要多少时间 | 10 | 10 |
| Development | 开发 | ||
| · Analysis | · 需求分析 (包括学习新技术) | 20 | 60 |
| · Design Spec | · 生成设计文档 | 10 | 10 |
| · Design Review | · 设计复审 (和同事审核设计文档) | 5 | 0 |
| · Coding Standard | · 代码规范 (为目前的开发制定合适的规范) | 5 | 0 |
| · Design | · 具体设计 | 20 | 60 |
| · Coding | · 具体编码 | 60 | 120 |
| · Code Review | · 代码复审 | 20 | 0 |
| · Test | · 测试(自我测试,修改代码,提交修改) | 30 | 60 |
| Reporting | 报告 | ||
| · Test Report | · 测试报告 | 20 | 60 |
| · Size Measurement | · 计算工作量 | 20 | 10 |
| · Postmortem & Process Improvement Plan | · 事后总结, 并提出过程改进计划 | 20 | 60 |
| 合计 | 220 | 450 |
如图所示,第一次项目的估计情况是严重与事实不符的,时间上花费了两倍有余,可能是因为事先根本对这些程序没有非常清晰的概念。
二、思路及设计
解题思路描述。即刚开始拿到题目后,如何思考,如何找资料的过程。(3')
设计实现过程。设计包括代码如何组织,比如会有几个类,几个函数,他们之间关系如何,关键函数是否需要画出流程图?单元测试是怎么设计的?(4')
代码说明。展示出项目关键代码,并解释思路与注释说明。(3')
1. 解题思路
最开始最直接的想法就是暴力枚举,每次取一条,和其他所有图形求交点,加入集合中,让集合自动去重。复杂度为\(O(N^2)\) ,对于\(1\leq N\leq 1000\) 完全没问题,但是经过试验,\(N>10^5\) 时不能达到性能要求。
实际上每次取出一条,不用和其他所有图形都求一遍,之前取出过的图形已经求过了不用再求,只用和没有取出的图形求一遍,但是这种思路复杂度没有下降,仍然是一种“暴力求解法”。
转而思考其他方法,动态规划就是一种极佳的办法,也在网络上搜到类似的题目:求直线交点数目,但是并不符合题意,因为他们有一个很重要的假设,任意三条直线不想交与一点。
我们知道,如果只有直线相交,任意三条直线不交一点,且没有直线平行,则总数是固定的\(\frac{n(n-1)}{2}\),而每出现下面所示的情况,总数都会相应减小:
- 聚合点(n条线交于一点):总数减\(\frac{n(n-1)}{2}-1\)
- 平行线(n条线平行):总数减\(\frac{n(n-1)}{2}\)
平行线很好说,建立集合列一个个加进来就好,然而真正要命的是聚合点怎么去寻找。三条直线交于一点,不仅需要考虑斜率,还得考虑截距,即ax+by+c=0 中a、b、c都需要考虑。n条直线相交于一点即以下方程组有解:
$$\begin{cases} a_1 x+b_1y=-c_1\\ a_2 x+b_2y=-c_2\\...\\ a_n x+b_ny=-c_n\\ \end{cases} $$
相当于一个维数大于秩的矩阵有解:
$$ \begin{pmatrix} a_{1} & b_{1}\\ \vdots & \vdots\\ a_{n} & b_{n} \end{pmatrix} \begin{pmatrix} x\\ y \end{pmatrix} = -\begin{pmatrix} c_1\\ \vdots\\c_n \end{pmatrix}$$
相当于:
$$ \begin{pmatrix} a_{1} & b_{1} & c_1\\ \vdots & \vdots &\vdots\\ a_{n} & b_{n} &c_n \end{pmatrix} \begin{pmatrix} x\\ y \\1 \end{pmatrix} = 0$$
其中,
$$\begin{pmatrix} a_{1} \ \vdots\ a_{n} \end{pmatrix}$$ $$\begin{pmatrix} b_{1} \ \vdots\ b_{n} \end{pmatrix}$$ $$\begin{pmatrix} c_{1} \ \vdots\ c_{n} \end{pmatrix}$$ 是在n维空间中的一个向量,而它们的线性组合要能为0向量(其中c为必要项),最终要保证的是三个向量共面!
然而就算你能以\(O(1)\)的复杂度判断多条直线是否相交与一点,要遍历所有的组合又好比一颗巨大的树。最终只能望而却步。
2. 设计实现过程
主函数:每次输入一个图形,与其他所有图形进行相交运算,将所得的结果存入交点集合
Dot类:继承与\(Pair<float, float>\) ,表示点的坐标或者一个向量,能进行加减乘除运算,同时有求模长、单位化方法
class Dot : public pair<float, float> {
public:
Dot(float a, float b) {
first = a;
second = b;
}
inline Dot operator+(Dot dot) { return {first + dot.first, second + dot.second}; }
inline Dot operator-(Dot dot) { return {first - dot.first, second - dot.second}; }
inline Dot operator*(float t) { return {first * t, second * t}; }
inline Dot operator/(float t) { return {first / t, second / t}; }
inline float norm() { return first*first + second*second; }
inline float abs() { return sqrt(norm()); }
inline void unify() { *this=*this/abs(); }
};
Line类:有通过两个点坐标初始化方法和三个参数a,b,c初始化方法,有判断是否与另一条线平行,求与另一条线交点的方法
class Line {
public:
float a, b, c;
Line(float x0, float y0, float x1, float y1);
Line(float aa, float ab, float ac);
bool parallel(Line l);
void intersect(set<Dot> *intersections, Line l);
Dot intersect(Line l);
}
Circle类:有通过圆心坐标和半径初始化方法,求到一条直线距离,求与另一个圆交点,求与直线的交点方法。
class Circle {
public:
float x, y, r;
Circle(float ax, float ay, float ar) : x(ax), y(ay), r(ar) {}
float distance(Line l);
void intersect(set<Dot> *intersections, Line l);
void intersect(set<Dot> *intersections, Circle c);
};
3. 单元测试
单元测试分别设计了直线与直线相交(包括平行和相交),圆与直线相交(包括相离、相切、相交),圆与圆相交(包括相离、相切、相交)三种情况,输出最后的交点坐标。
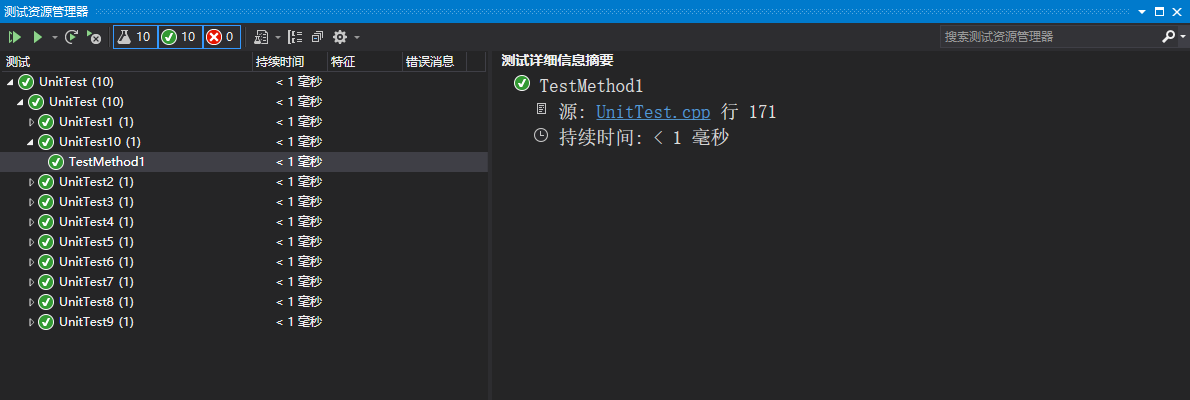
如图所示,在这三种测试下,结果均正确。
4. 关键代码说明
因为交点个数可能是0、1、2个,没法设定一个定长的返回值,故只好传入一个指向点集的指针,有几个交点就存几个进去。
首先是Line的两个intersect方法:
// 直接通过公式,返回交点,不想交则报错
Dot Line::intersect(Line l) {
if(parallel(l)) throw exception();
return Dot(b * l.c - l.b * c, l.a * c - a * l.c) / (a * l.b - l.a * b);
}
// 将交点加入集合中,忽略错误
void Line::intersect(set<Dot> *intersections, Line l) {
try {
intersections->insert(intersect(l));
} catch (exception e) {}
}
其次是Circle的两个intersect方法,和circle相交的算法直接通过公式计算,不再赘述。而与直线相交需要先做一个到该直线的垂线,求出垂足:
void Circle::intersect(set<Dot> *intersections, Line l) {
float d = distance(l);
if (d > r) return;
Line ll(l.b, -l.a, l.a * y - l.b * x); // 垂线
Dot dot = ll.intersect(l); // 垂足
if (d == r) {
intersections->insert(dot);
return;
}
float t = sqrt(r * r - d * d); // 距垂足长度
Dot direction(l.b, -l.a); // 方向向量
direction.unify(); // 单位化
intersections->insert(dot + direction * t);
intersections->insert(dot - direction * t);
}
三、性能及优化
记录在改进程序性能上所花费的时间,描述你改进的思路,并展示一张性能分析图(由 VS 2019 的性能分析工具自动生成),并展示你程序中消耗最大的函数。(3')
| N | 时间(ms) |
|---|---|
| 200 | 9 |
| 400 | 36 |
| 600 | 92 |
| 800 | 175 |
| 1000 | 303 |
| 2000 | 1429 |
| 3000 | 3458 |
| 4000 | 6463 |
| 5000 | 9820 |
| 10000 | 40873 |
如图所示采用暴力解法,结果大致呈现平方级复杂度,\(t=9(\frac{N}{200})^2\),当N取 500w,需要时间5625Mms =1562.5h是根本不可接受的。
通过性能分析图的描述如上,我发现程序中消耗最大的函数是void intersect(set<Dot> *intersections, Circle c);方法:
不可避免地出现了大量不可简化的计算。
void Circle::intersect(set<Dot> *intersections, Circle c) {
float a1, b1, R1, a2, b2, R2;
a1 = x;
b1 = y;
R1 = r;
a2 = c.x;
b2 = c.y;
R2 = c.r;
float R1R1 = R1 * R1;
float a1a1 = a1 * a1;
float b1b1 = b1 * b1;
float a2a2 = a2 * a2;
float b2b2 = b2 * b2;
float R2R2 = R2 * R2;
float subs1 = a1a1 - 2 * a1 * a2 + a2a2 + b1b1 - 2 * b1 * b2 + b2b2;
if(subs1<=0) return;
float subs2 = -R1R1 * a1 + R1R1 * a2 + R2R2 * a1 - R2R2 * a2 + a1a1 * a1 - a1a1 * a2 - a1 * a2a2 + a1 * b1b1 -
2 * a1 * b1 * b2 + a1 * b2b2 + a2a2 * a2 + a2 * b1b1 - 2 * a2 * b1 * b2 + a2 * b2b2;
float subs3 = -R1R1 * b1 + R1R1 * b2 + R2R2 * b1 - R2R2 * b2 + a1a1 * b1 + a1a1 * b2 - 2 * a1 * a2 * b1 -
2 * a1 * a2 * b2 + a2a2 * b1 + a2a2 * b2 + b1b1 * b1 - b1b1 * b2 - b1 * b2b2 + b2b2 * b2;
float sigma = sqrt((R1R1 + 2 * R1 * R2 + R2R2 - a1a1 + 2 * a1 * a2 - a2a2 - b1b1 + 2 * b1 * b2 - b2b2) *
(-R1R1 + 2 * R1 * R2 - R2R2 + subs1));
Dot dot1(subs2, subs3), dot2(b1 - b2, a2 - a1);
intersections->insert((dot1 + dot2 * sigma) / (2 * subs1));
intersections->insert((dot1 - dot2 * sigma) / (2 * subs1));
}

