
强化学习-学习笔记8 | Q-learning
 上一篇笔记认识了Sarsa,可以用来训练动作价值函数Qπ;本篇来学习Q-Learning,这是另一种 TD 算法,用来学习 最优动作价值函数 Q-star,这就是之前价值学习中用来训练 DQN 的算法。
上一篇笔记认识了Sarsa,可以用来训练动作价值函数Qπ;本篇来学习Q-Learning,这是另一种 TD 算法,用来学习 最优动作价值函数 Q-star,这就是之前价值学习中用来训练 DQN 的算法。
上一篇笔记认识了Sarsa,可以用来训练动作价值函数\(Q_\pi\);本篇来学习Q-Learning,这是另一种 TD 算法,用来学习 最优动作价值函数 Q-star,这就是之前价值学习中用来训练 DQN 的算法。
8. Q-learning
承接上一篇的疑惑,对比一下两个算法。
8.1 Sarsa VS Q-Learning
这两个都是 TD 算法,但是解决的问题不同。
Sarsa
- Sarsa 训练动作价值函数 \(Q_\pi(s,a)\);
- TD target:\(y_t = r_t + \gamma \cdot {Q_\pi(s_{t+1},a_{t+1})}\)
- 价值网络是 \(Q_\pi\) 的函数近似,Actor-Critic 方法中,用 Sarsa 更新价值网络(Critic)
Q-Learning
-
Q-learning 是训练最优动作价值函数 \(Q^*(s,a)\)
-
TD target :\(y_t = r_t + \gamma \cdot {\mathop{max}\limits_{a}Q^*(s_{t+1},a_{t+1})}\),对 Q 求最大化
注意这里就是区别。
-
用Q-learning 训练DQN
个人总结区别在于Sarsa动作是随机采样的,而Q-learning是取期望最大值
下面推导 Q-Learning 算法。
8.2 Derive TD target
注意Q-learning 和 Sarsa 的 TD target 有区别。
之前 Sarsa 证明了这个等式:\(Q_\pi({s_t},{a_t})=\mathbb{E}[{R_t} + \gamma \cdot Q_\pi({S_{t+1}},{A_{t+1}})]\)
等式的意思是,\(Q_\pi\) 可以写成 奖励 以及 \(Q_\pi\) 对下一时刻做出的估计;
等式两端都有 Q,并且对于所有的 \(\pi\) 都成立。
所以把最优策略记作 \(\pi^*\),上述公式对其也成立,有:
\(Q_{\pi^*}({s_t},{a_t}) = \mathbb{E}[{R_t} + \gamma \cdot Q_{\pi^*}({S_{t+1}},{A_{t+1}})]\)
通常把\(Q_{\pi^*}\) 记作 \(Q^*\),都可以表示最优动作价值函数,于是便得到:
\(Q^*({s_t},{a_t})=\mathbb{E}[{R_t} + \gamma \cdot Q^*({S_{t+1}},{A_{t+1}})]\)
处理右侧 期望中的 \(Q^*\),将其写成最大化形式:
-
因为\(A_{t+1} = \mathop{argmax}\limits_{a} Q^*({S_{t+1}},{a})\) ,A一定是最大化 \(Q^*\)的那个动作
解释:
给定状态\(S_{t+1}\),Q* 会给所有动作打分,agent 会执行分值最高的动作。
-
因此 \(Q^*({S_{t+1}},{A_{t+1}}) = \mathop{max}\limits_{a} Q^*({S_{t+1}},{a})\),\(A_{t+1}\) 是最优动作,可以最大化 \(Q^*\);
-
带入期望得到:\(Q^({s_t},{a_t})=\mathbb{E}[{R_t} + \gamma \cdot \mathop{max}\limits_{a} Q^*({S_{t+1}},{a})]\)
左边是 t 时刻的预测,等于右边的期望,期望中有最大化;期望不好求,用蒙特卡洛近似。用 \(r_t \ s_{t+1}\) 代替 \(R_t \ S_{t+1}\);
-
做蒙特卡洛近似:\(\approx {r_t} + \gamma \cdot \mathop{max}\limits_{a} Q^*({s_{t+1}},{a})\)称为TD target \(y_t\)。
此处 \(y_t\) 有一部分真实的观测,所以比左侧 Q-star 完全的猜测要靠谱,所以尽量要让左侧 Q-star 接近 \(y_t\)。
8.3 算法过程
a. 表格形式
- 观测一个transition \(({s_t},{a_t},{r_t},{s_{t+1}})\)
- 用 \(s_{t+1} \ r_t\) 计算 TD target:\({r_t} + \gamma \cdot \mathop{max}\limits_{a} Q^*({s_{t+1}},{a})\)
- Q-star 就是下图这样的表格:
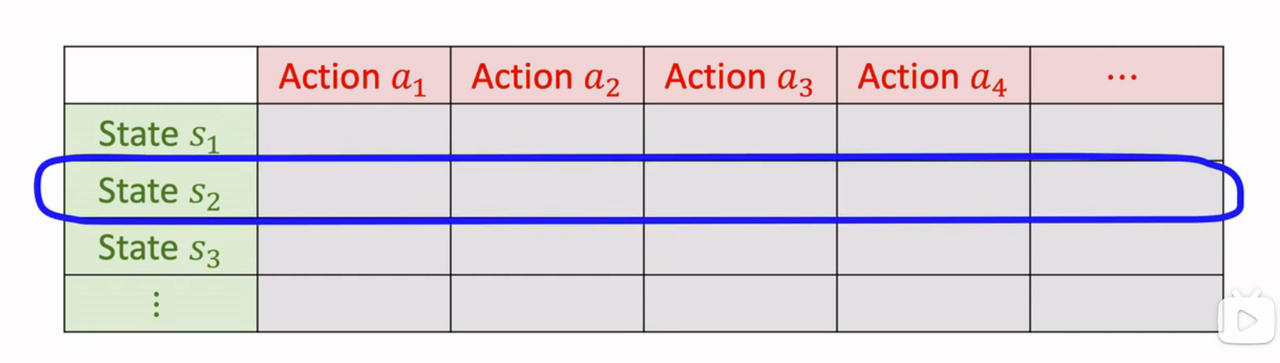
找到状态 \(s_{t+1}\) 对应的行,找出最大元素,就是 \(Q^*\) 关于 a 的最大值。
- 计算 TD error: \(\delta_t = Q^*({s_t},{a_t}) - y_t\)
- 更新\(Q^*({s_t},{a_t}) \leftarrow Q^*({s_t},{a_t}) - \alpha \cdot \delta_t\),更新\((s_{t},a_t)\)位置,让Q-star 值更接近 \(y_t\)
b. DQN形式
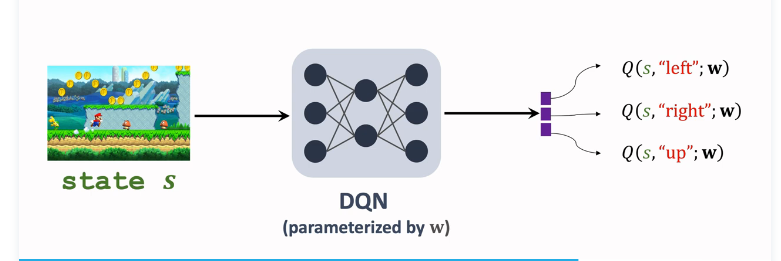
DQN \(Q^*({s},{a};w)\)近似 $Q^*({s},{a}) $,输入是当前状态 s,输出是对所有动作的打分;
接下来选择最大化价值的动作 \({a_t}= \mathop{argmax}\limits_{{a}} Q^*({S_{t+1}},{a},w)\),让 agent 执行 \(a_t\);用收集到的 transitions 学习训练参数 w,让DQN 的打分 q 更准确;
用 Q-learning 训练DQN的过程:
- 观测一个transition \(({s_t},{a_t},{r_t},{s_{t+1}})\)
- TD target: \({r_t} + \gamma \cdot \mathop{max}\limits_{a} Q^*({s_{t+1}},{a};w)\)
- TD error: \(\delta_t = Q^*({s_t},{a_t};w) - y_t\)
- 梯度下降,更新参数: \(w \leftarrow w -\alpha \cdot \delta_t \cdot \frac{\partial Q^*({s_t},{a_t};w)}{\partial w}\)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号