强化学习-学习笔记4 | Actor-Critic
 RL中的价值学习和策略学习分别基于不同的思路完成对 agent 的自动控制,而actor-critic将两者结合在一起,策略网络扮演运动员的角色,价值网络扮演裁判的角色,分别训练,得到较为满意的结果。
RL中的价值学习和策略学习分别基于不同的思路完成对 agent 的自动控制,而actor-critic将两者结合在一起,策略网络扮演运动员的角色,价值网络扮演裁判的角色,分别训练,得到较为满意的结果。
Actor-Critic 是价值学习和策略学习的结合。Actor 是策略网络,用来控制agent运动,可以看做是运动员。Critic 是价值网络,用来给动作打分,像是裁判。
4. Actor-Critic
4.1 价值网络与策略网络构建
a. 原理介绍
状态价值函数:
$ V_\pi(s)=\sum_{{a}}\pi({a}|{s})\cdot Q_\pi({s},{a})$ (离散情况,如果是连续的需要换成定积分)
V 是动作价值函数 \(Q_\pi\) 的期望,\(\pi({s}|{a})\) 策略函数控制 agent 做运动,\(Q_\pi({s},{a})\) 价值函数评价动作好坏。但是上述这两个函数我们都不知道,但是可以分别用一个神经网络来近似这两个函数,然后用Actor-Critic方法来同时学习这两个网络。
策略网络(actor):用网络 \(\pi({s}|{a};\theta)\) 来近似 \(\pi({s}|{a})\),\(\theta\) 是网络参数
价值网络(critic):用网络 \(q({s},{a};w)\) 来近似 \(Q_\pi({s},{a})\),\(w\) 是网络参数
actor 是一个体操运动员,可以自己做动作,而 agent 想要做的更好,但是不知道怎么改进,这就需要裁判给她打分,这样运动员就知道什么样动作的分数高,什么样动作的分数低,这样就能改进自己,让分数越来越高。
这样:$ V_\pi({s})=\sum_{{a}}\pi({a}|{s})\cdot Q_\pi({s},{a})\approx\sum_a\pi(a|s;\theta)\cdot q(s,a;w)$$
b. Actor 搭建
策略网络。
- 输入:状态 s
- 输出:可能的动作概率分布
- \(\mathcal{A}\) 是动作集,如\(\mathcal{A}\) =
- \(\sum_{a\in\mathcal{A}}\pi(a|s,\theta)=1\)
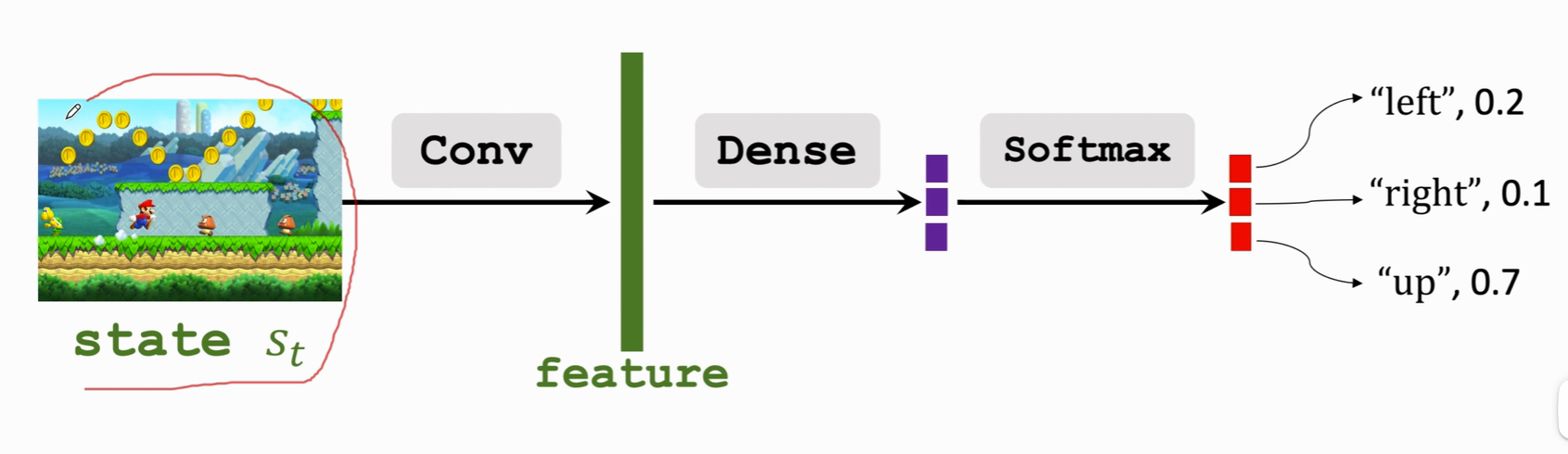
卷积层 Conv 把 state 变成 一个特征向量 feature ,用一个或多个全连接层 Dense 把特征向量 映射为紫色,归一化处理后得到每个动作的概率。
c. Critic搭建
输入:有两个,状态 s 和动作 a
输出:近似的动作价值函数(scalar)
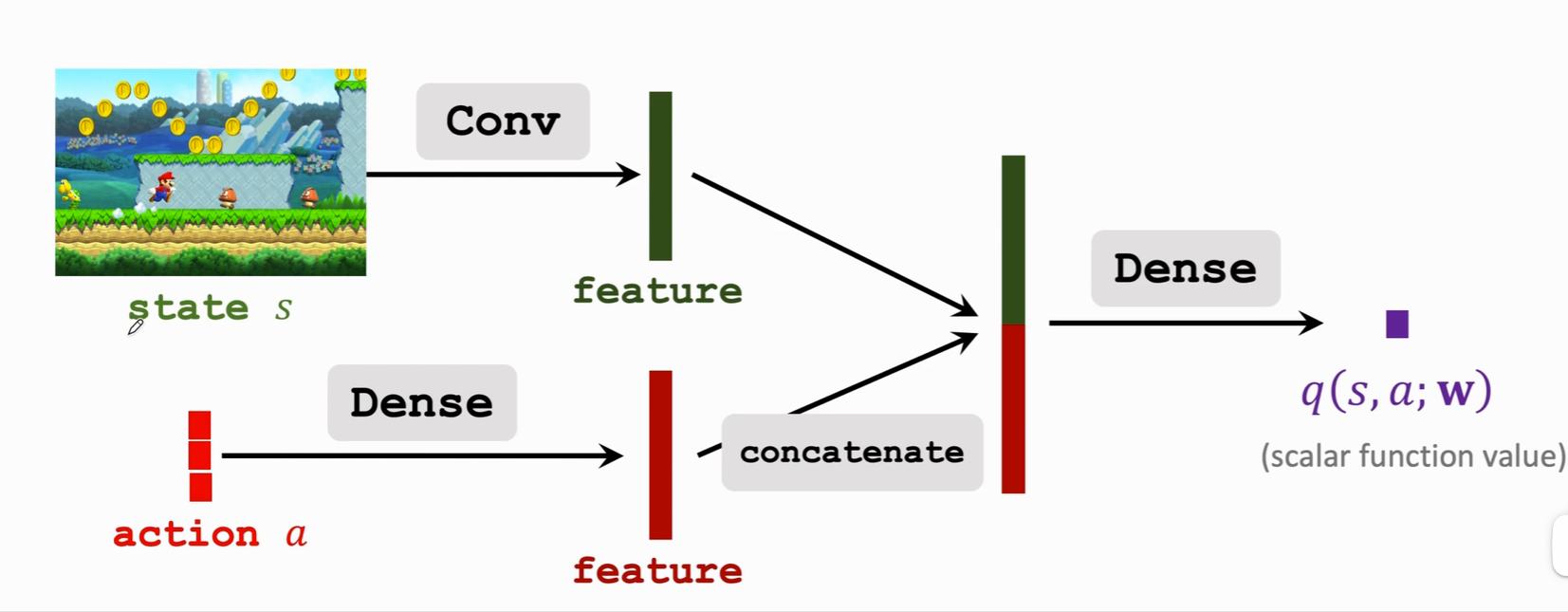
如果 动作 是离散的,可以用 one-hot coding 来表示,比如向左为[1,0,0],向右为[0,1,0] ······ 分别用卷积层与全连接层从输入中提取特征,得到两个特征向量,然后把这两个特征向量拼接起来,得到一个更高的特征向量,最后用一个全连接层输出一个实数,这个实数就是裁判给运动员打的分数。这个动作说明,处在状态 s 的情况下,做出动作 a 是好还是坏。这个价值网络可以与策略网络共享卷积层参数,也可以跟策略网络完全独立。
4.2 Actor-Critic Method
同时训练策略网络与动作网络就称为 Actor-Critic Method。
定义:使用神经网络来近似 两个价值函数
训练:更新参数 \(\theta、w\)
- 更新策略网络\(\pi({s}|{a};\theta)\)是为了让\(V({s};\theta,w)\)的值增加
- 监督信号仅由价值网络提供
- 运动员actor 根据裁判critic 的打分来不断提高自己的水平
- 更新价值网络\(q({s},{a};w)\)是为了让打分更精准
- 监督信号仅来自环境的奖励
- 一开始裁判是随机打分,但是会根据环境给的奖励提高打分水平,使其接近真实打分。
步骤总结:
- 观测状态 \(s_t\)
- \(s_t\) 作为输入,根据策略网络 \(\pi({\cdot}|{s_t};\theta_t)\) 随机采样一个动作 \(a_t\)
- 实施动作 \(a_t\) 并观测新状态 \(s_{t+1}\) 以及奖励 \(r_t\)
- 用奖励 \(r_t\) 通过 TD 算法 在价值网络中更新 w,让裁判变得更准确
- 使用 策略梯度算法 在策略网络中更新\(\theta\),让运动员技术更好
a. TD 更新价值网络
-
用价值网络 Q 给 动作\(a_t、a_{t+1}\) 打分,即计算 \(q({s_t}, {a_t} ;w_t)\) 与 \(q({s_{t+1}},{a_{t+1}};w_t)\)
-
计算TD target:\(y_t = {r_t} + \gamma \cdot q({s_{t+1}},{a_{t+1}};w_t)\),
比对上一篇笔记中的策略学习,需要用蒙特卡洛来近似\(q({s_t},{a_t} ;w_t)\),而使用价值网络来近似更真实一些。
-
损失函数是预测值与部分真实值之间的差。
Loss值: \(L(w)=\frac{1}{2}[q({s_t},{a_t};w)-y_t]^2\)
-
梯度下降:\(W_{t+1} = w_t -\alpha \cdot \frac{\partial L(w)}{\partial w}|w=w_t\)
b. 策略梯度更新策略网络
状态价值函数 V 相当于运动员所有动作的平均分:
\(V({s};\theta,w)=\sum_a\pi({s}|{a};\theta)\cdot q({s},{a};w)\)
策略梯度:函数 \(V({s};\theta,w)\) 关于参数 \(\theta\) 的导数
- \(g({a},\theta)=\frac{\partial log \pi({a}|{s};\theta)}{\partial \theta} \cdot q({s},{a};w)\),这里 q 相当于裁判的打分
- \(\frac{\partial V(s;\theta;w_t)}{\partial \theta} = \mathbb{E}_{A}[g({A},\theta)]\)策略梯度相当于对函数 g 求期望,把 A 给消掉,但是很难求期望,用蒙特卡洛近似取样求就行了。
算法:
根据策略网络随机抽样得到动作 a :\({a} \sim \pi(\cdot|{s_t};\theta_t)\) 。
对于 \(\pi\) 随机抽样保证\(g(a,\theta)\)是无偏估计
有了随机梯度 g,可以做一次梯度上升:\(\theta_{t+1} = \theta_t + \beta \cdot g({a},\theta_t)\),此处 \(\beta\) 是学习率。
c. 过程梳理
下面我们以运动员和裁判的例子梳理一下过程:
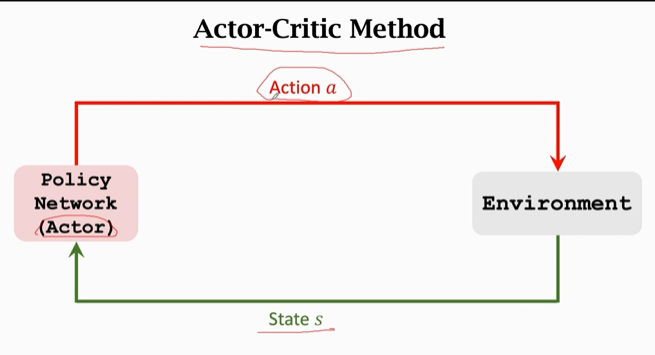
首先,运动员(左侧的策略网络)观测当前状态 s ,控制 agent 做出动作 a;运动员想要进步,但它不知道怎样变得更好(或者没有评判标准),因此引入裁判来给予运动员评价:
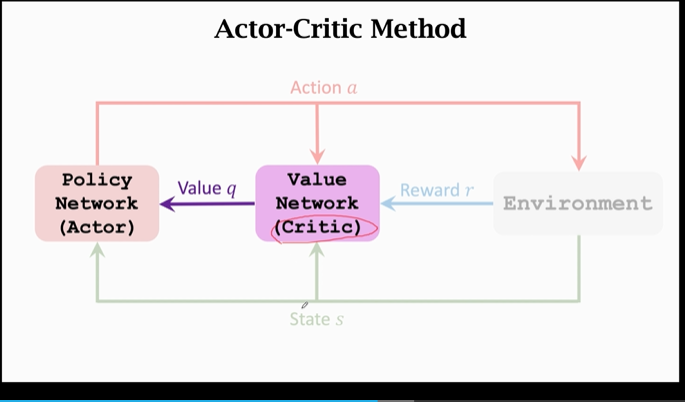
运动员做出动作后,裁判员(价值网络)会根据 a 和 s 对运动员(策略网络)打一个分 q,这样运动员根据 q 来改进自己:
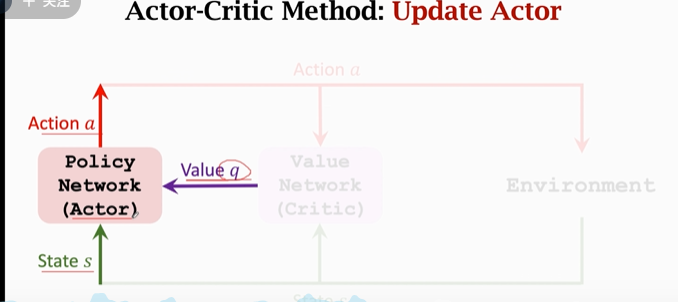
运动员的“技术”指的是 策略网络中的参数,我们此前认定参数越好,我们的效果就越好。在这个模型中,运动员拿到 s、q 以及 a来计算 策略梯度,通过梯度上升来更新参数。通过改进 “技术”,运动员的平均分(就是value q)会越来越高。
但值得注意的是:至此,运动员一直是在裁判的评判下进行的,他的标准 q 是裁判给的。运动员的平均分 q 越高也不能说明真实水平的上升。我们还需要提升裁判的水平。
增加一个想法:我觉得 actor-critic 的思想是两部分,一是让 评判标准更接近上帝 的想法,二是 在给定评判标准下 让执行效果拿到更大的分数。
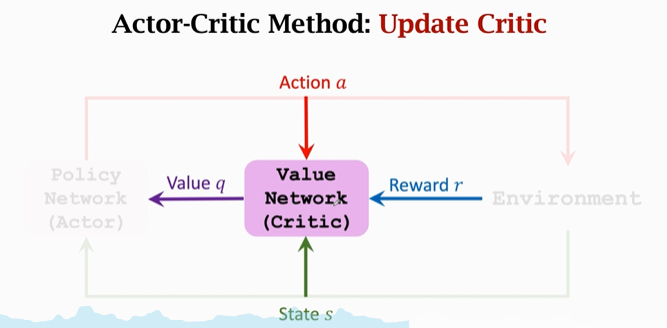
对于 价值网络/裁判 来说 初始的打分是随机的。裁判要靠 奖励r 来提高打分的水平,这里奖励r 就相当于 上帝的判断。价值网络根据 a、s、r 来给出分数 q ,通过相邻两次的分数 \(q_t、q_{t+1}\) 以及 \(r_t\),使用 TD 算法 来更新参数,提高效果
d. 算法总结
下面稍微正式一点的总结一下:
-
观测旧状态 \(s_t\),根据策略网络\(\pi({\cdot}|{s_t};\theta_t)\)随机采样一个动作\(a_t\)
-
agent 执行动作\(a_t\);环境会告诉我们新的状态\(s_{t+1}\)和奖励\(r_t\)
-
拿新的状态\(s_{t+1}\)作为输入,用策略网络\(\pi\)计算出新的概率并随机采样新的动作:\({\tilde{a}_{t+1}} \sim \pi({\cdot}|{s_{t+1}};\theta_t)\),这个动作只是假想的动作,agent不会执行,只是拿来算下 Q 值。
-
接下来算两次价值网络的输出:\(q_t=q({s_t},{a_t};w_t)和q_{t+1}=q({s_{t+1}},{\tilde{a}_{t+1}};w_t)\),\({\tilde{a}_{t+1}}\)用完就丢掉了,并不会真正执行;
-
计算TD error:\(\delta_t = {q_t}-\underbrace{({r_t}+\gamma \cdot {q_{t+1}})}_{TD \\\ target}\)
-
对价值网络求导:\(d_{w,t} = \frac{\partial q({s_t},{a_t};w)}{\partial w}|w=w_t\)
这一步 torch 和 tensenflow 都可以自动求导。
-
TD算法 更新价值网络,让裁判打分更精准:\(w_{t+1}=w_t - \alpha \cdot \delta_t\cdot d_{w,t}\)
-
对策略网络$$\pi$$求导:\(d_{\theta,t}=\frac{\partial log \pi({a_t}|{s_t},\theta)}{\partial \theta}|\theta=\theta_t\)
同理,可以自动求导
-
用梯度上升来更新策略网络,让运动员平均成绩更高:\(\theta_{t+1} = \theta_t + \beta \cdot {q_t} \cdot d_{\theta,t}\),这里\({q_t} \cdot d_{\theta,t}\)是策略梯度的蒙特卡洛近似。
每一轮迭代做以上9个步骤,且制作一次动作,观测一次奖励,更新一次神经网络参数。
根据策略梯度算法推导,算法第 9 步用到了 \({q_t}\),它是裁判给动作打的分数,书和论文通常拿 \({\delta_t}\) 来替代 \({q_t}\)。\({q_t}\) 是标准算法,\({\delta_t}\) 是Policy Gradient With Baseline(效果更好),都是对的,算出来期望也相等。
Baseline是什么?接近 \(q_t\) 的数都可以作为 Baseline,但不能是 \(a_t\) 的函数。
至于为什么baseline效果更好,因为可以更好的计算方差,更快的收敛。
这里的等价后面再讨论。这里先理解。
4.3 总结
我们的目标是:状态价值函数:$ V_\pi({s})=\sum_{{a}}\pi({a}|{s})\cdot Q_\pi({s},{a})$,越大越好
- 但是直接学 \(\pi\) 函数不容易,用神经网络-策略网络 \(\pi({s}|{a};\theta)\) 来近似
- 计算 策略梯度 的时候有个困难就是不知道动作价值函数 \(Q_\pi\),所以要用神经网络-价值网络\(q({s},{a};w)\)来近似。
在训练时:
- agent由 策略网络(actor) 给出动作 \(a_t \sim \pi(\cdot|{s_t};\theta)\)
- 价值网络 q 辅助训练 \(\pi\),给出评分
训练后:
- 还是由策略网络给出动作\(a_t \sim \pi(\cdot|{s_t};\theta)\)
- 价值网络 q 不再使用
如何训练:
用策略梯度来更新策略网络:
- 尽可能提升状态价值:$ V_\pi({s})=\sum_a\pi(a|s;\theta)\cdot q(s,a;w)$
- 计算策略梯度,用蒙特卡洛算: \(\frac{\partial V(s;\theta;w_t)}{\partial \theta} = \mathbb{E}_{A}[\frac{\partial \\\ log \\\ \pi({a}|{s};\theta)}{\partial \theta} \cdot q({s},{a};w)]\)
- 执行梯度上升。
TD 算法更新价值网络
-
\(q_t = q(s_t,a_t;w)\)是价值网络是对期望回报的估计;
-
TD target:\(y_t = r_t + \gamma \cdot \mathop{max}\limits_{a} q(s_{t+1},a_{t+1};w)\),\(y_t\)也是价值网络是对期望回报的估计,不过它用到了真实奖励,因此更靠谱一点,所以将其作为 target,相当于机器学习中的标签。
-
把\(q_t与y_t\)差值平方作为损失函数计算梯度:
\(\frac{\partial(q_t-y_t)^2/2}{\partial w} = (q_t-y_t)\cdot\frac{\partial q(s_t,a_t;w)}{\partial w}\)
-
梯度下降,缩小\(q_t与y_t\)差距。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号