强化学习-学习笔记2 | 价值学习
 继续学习强化学习,介绍强化学习两大分支之一的价值学习,以及价值学习的一种经典实现方式DQN,以及DQN的训练算法TD learning.
继续学习强化学习,介绍强化学习两大分支之一的价值学习,以及价值学习的一种经典实现方式DQN,以及DQN的训练算法TD learning.
Value-Based Reinforcement Learning : 价值学习
2. 价值学习
2.1 Deep Q-Network DQN
其实就是用一个神经网络来近似 \(Q*\) 函数。
agent 的目标是打赢游戏,如果用强化学习的语言来讲,就是在游戏结束的时候拿到的奖励总和 Rewards 越大越好。
a. Q-star Function
问题:假设知道了 \(Q^*(s,a)\) 函数,哪个是最好的动作?
显然,最好的动作是\(a^* = \mathop{argmax}\limits_{a}Q^*(s,a)\) ,
\(Q^*(s,a)\)可以给每个动作打分,就像一个先知,能告诉你每个动作带来的平均回报,选平均回报最高的那个动作。
但事实是,每个人都无法预测未来,我们并不知道\(Q^*(s,a)\)。而价值学习就在于学习出一个函数来近似\(Q^*(s,a)\) 作决策。
- 解决:Deep Q-network(DQN),即用一个神经网络 \(Q(s,a;w)\)来近似 \(Q^*(s,a)\) 函数。
- 神经网络参数是 w ,输入是状态 s,输出是对所有可能动作的打分,每一个动作对应一个分数。
- 通过奖励来学习这个神经网络,这个网络给动作的打分就会逐渐改进,越来越精准
- 玩上几百万次超级玛丽,就能训练出一个先知。
b. Example
对于不同的案例,DQN 的结构会不一样。
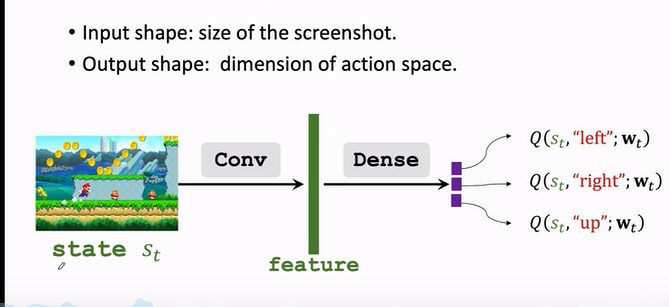
如果是玩超级玛丽
- 屏幕画面作为输入
- 用一个卷积层把图片变成特征向量
- 最后用几个全连接层把特征映射到一个输出的向量
- 输出的向量就是对动作的打分,向量每一个元素对应一个动作的分值,agent 会选择分值最大的方向进行动作。
c. 用 DQN 打游戏
DQN 的具体执行过程如下:

分步解释:
- $ s_t \rightarrow a_t$:当前观测到状态 \(s_t\),用公式 $ a_t=\mathop{argmax}\limits_{a}Q^*(s,a)$ 把 \(s_t\) 作为输入,给所有动作打分,选出分数最高的动作 \(a_t\) 。
- agent 执行 \(a_t\) 这个动作后,环境会改变状态,用状态转移函数 \(p(\cdot|s_t,a_t)\) 随机抽样得出一个新状态 \(s_{t+1}\)。
- 环境还会告诉这一步的奖励 \(r_t\) ,奖励就是强化学习中的监督信号,DQN靠这些奖励来训练。
- 有了新的状态 \(s_{t+1}\),DQN 继续对所有动作打分,agent 选择分数最高动作 \(a_{t+1}\)。
- 执行 \(a_{t+1}\) 后,环境会再更新一个状态 \(s_{t+2}\),给出一个奖励 \(r_{t+1}\)。
- 然后不断循环往复,直到游戏结束
2.2 TD 学习
如何训练 DQN ?最常使用的是 Temporal Difference Learning。TD学习的原理可以用下面这个例子来展示:
a. 案例分析
要开车从纽约到亚特兰大,有一个模型\(Q(w)\)预测出开车出行的开销是1000分钟。这个预测可能不准,需要更多的人提供数据来训练模型使得预测更准。
- 问题:需要怎样的数据?如何更新模型。
-
出发之前让模型做一个预测,记作\(q\),\(q=Q(w)\),比如\(q=1000\)。到了目的地,发现其实只用了860分钟,获取真实值 \(y=860\)。
-
实际值\(y\)与预测值\(q\)有偏差,这就造成了 loss 损失
-
loss 定义为实际值与预测值的平方差:\(L=\frac{1}{2}(q-y)^2\)
-
对损失 \(L\)关于参数\(w\)求导并用链式法则展开:
\(\frac{\partial L}{\partial w} = \frac{\partial q}{\partial w} \cdot \frac{\partial L}{\partial q} =(q-y)\cdot\frac{\partial Q(w)}{\partial w}\)
-
梯度求出来了,可以用梯度下降来更新模型参数 w :\(w_{t+1} = w_t - \alpha \cdot \frac{\partial L}{\partial w} \vert _{w=w_t}\)
缺点:这种算法比较 naive,因为要完成整个旅程才能完成对模型做一次更新。
那么问题来了:假如不完成整个旅行,能否完成对模型的更新?
可以用 TD 的思想来考虑这件事情。比如我们中途路过 DC 不走了,没去亚特兰大,可以用 TD 算法完成对模型的更新,即
-
出发前预测:NYC -> Atlanta 要花1000分钟,这是预测值。
到了 DC 时,发现用了 300 分钟,这是真实观测值,尽管它是针对于部分的。
-
模型这时候又告知,DC -> Atlanta 要花 600 分钟。
-
模型原本预测:$Q(w) = 1000 $,而到 DC 的新预测:300 + 600 = 900,这个新的 900 估值就叫 TD target 。
这些名词要记住,后面会反复使用,TD target 是使用了 TD算法的道德整体预测值。
-
TD target \(y=900\)虽然也是个估计预测值,但是比最初的 1000 分钟更可靠,因为有事实成分。
-
把 TD target \(y\) 就当作真实值:\(L = \frac{1}{2}(Q(w)-y)^2\), 其中$Q(w) - y $称为TD error。
-
求导:\(\frac{\partial L}{\partial w} =(1000-900)\cdot\frac{\partial Q(w)}{\partial w}\)
-
梯度下降更新模型参数 w :\(w_{t+1} = w_t - \alpha \cdot \frac{\partial L}{\partial w} \vert _{w=w_t}\)
b. 算法原理
换个角度来想,TD 的过程就是这样子的:
模型预测 NYC -> Atlanta = 1000, DC -> Atlanta = 600,两者差为400,也就是NYC -> DC = 400,但实际只花了300分钟预计时间与真实时间之间的差就是TD error:\(\delta = 400-300 = 100\)。
TD 算法目标在于让 TD error 尽量接近 0 。
即我们用部分的真实 修改 部分的预测,而使得整体的预测更加接近真实。我们可以通过反复校准 可知的这部分真实 来接近我们的理想情况。
c. 用于 DQN
(1) 公式引入
上述例子中有这样一个公式:$T_{NYC\rightarrow ATL} \approx T_{NYC\rightarrow DC} + T_{DC\rightarrow ATL} $
想要用 TD 算法,就必须要用类似这样的公式,等式左边有一项,右边有两项,其中有一项是真实观测到的。
而在此之前,在深度强化学习中也有一个这样的公式:\(Q(s_t,a_t;w)=r_t+\gamma \cdot Q(s_{t+1},a_{t+1};w)\)。
公式解释:
- 左边是 DQN 在 t 时刻做的估计,这是未来奖励总和的期望,相当于 NYC 到 ATL 的预估总时间。
- 右边 \(r_t\)是真实观测到的奖励,相当于 NYC 到 DC 。
- \(Q(s_{t+1},a_{t+1};w)\) 是 DQN 在 t+1 时刻做的估计,相当于 DC 到 ATL 的预估时间。
(2) 公式推导
为什么会有一个这样的公式?
回顾 Discounted return: \(U_t=R_t+\gamma R_{t+1}+\gamma^2 R_{t+2}+\gamma^3 R_{t+3}+\cdots\)
提出 \(\gamma\) 就得到 $ = R_t + \gamma(R_{t+1}+ \gamma R_{t+2}+ \gamma^2 R_{t+3}+\cdots) $
后面这些项就可以写成\(U_{t+1}\),即 \(=R_t+\gamma U_{t+1}\)
这样就得到:\(U_t = R_t + \gamma \cdot U_{t+1}\)
直观上讲,这就是相邻两个折扣算法的数学关系。
(3) 应用过程
现在要把 TD 算法用到 DQN 上
- t 时刻 DQN 输出的值 \(Q(s_t,a_t; w)\) 是对 \(U_t\) 作出的估计 \(\mathbb{E}[U_t]\),类似于 NYC 到 ATL 的预估总时间。
- 下一时刻 DQN 输出的值 \(Q(s_{t+1},a_{t+1}; w)\) 是对 \(U_{t+1}\) 作出的估计 \(\mathbb{E}[U_{t+1}]\),类似于 DC 到 ATL 的第二段预估时间。
- 由于 \(U_t = R_t + \gamma \cdot U_{t+1}\)
- 所以 \(\underbrace{Q(s_t,a_t; w) }_{\approx\mathbb{E}[U_t]}\approx \mathbb{E}[R_t+\gamma \cdot \underbrace{Q(s_{t+1},a_{t+1}; w)}_{\approx\mathbb{E}[U_{t+1}]}]\)
- \(\underbrace{Q(s_t,a_t;w)}_{prediction}=\underbrace{r_t+\gamma \cdot Q(s_{t+1},a_{t+1};w)}_{TD\ \ target}\)
有了 prediction 和 TD target ,就可以更新 DQN 的模型参数了。
-
t 时刻模型做出预测 \(Q(s_t,a_t;w_t)\);
-
到了 t+1时刻,观测到了真实奖励 \(r_t\) 以及新的状态 \(s_{t+1}\),然后算出新的动作 \(a_{t+1}\)。
-
这时候可以计算 TD target 记作 \(y_t\),其中\(y_t=r_t+\gamma \cdot Q(s_{t+1},a_{t+1};w)\)
-
t+1 时刻的动作 \(a_{t+1}\)怎么算的?DQN 要对每个动作打分,取分最高的,所以等于Q 函数关于a求最大化:$ y_t = r_t + \gamma \cdot \mathop{max}\limits_{a} Q(s_{t+1},a;w_t)$
-
我们希望预测\(Q(s_{t},a_{t};w)\)尽可能接近 TD target \(y_t\) ,所以我们把两者之差作为 Loss :
\(L_t=\frac{1}{2}[Q(s_{t},a_{t};w)-y_t]^2\)
-
做梯度下降:\(w_{t+1} = w_t - \alpha \cdot \frac{\partial L}{\partial w} \vert _{w=w_t}\)更新模型参数 w,来让 Loss 更小
2.3 总结
-
价值学习(本讲是DQN)基于最优动作价值函数 Q-star :
\(Q^*(s_t,a_t) = \mathbb{E}[U_t|S_t=s_t,A_t=a_t]\)
对 \(U_t\) 求期望,能对每个动作打分,反映每个动作好坏程度,用这个函数来控制agent。
-
DQN 就是用一个神经网络\(Q(s,a;w)\)来近似$Q^*(s,a) $
- 神经网络参数是 w ,输入是 agent 的状态 s
- 输出是对所有可能动作 $ a \in A$ 的打分
-
TD 算法过程
-
观测当前状态 $S_t = s_t $ 和已经执行的动作 \(A_t = a_t\)
-
用 DQN 做一次计算,输入是状态 \(s_t\),输出是对动作 \(a_t\) 的打分
记作\(q_t\),\(q_t = Q(s_t,a_t;w)\)
-
反向传播对 DQN 求导:\(d_t = \frac{\partial Q(s_t,a_t;w)}{\partial w} |_{ w=w_t}\)
-
由于执行了动作 \(a_t\),环境会更新状态为 \(s_{t+1}\),并给出奖励\(r_t\)。
-
求出TD target:\(y_t = r_t + \gamma \cdot \mathop{max}\limits_{a} Q(s_{t+1},a_t;w)\)
-
做一次梯度下降更新参数 w , \(w_{t+1} = w_t - \alpha \cdot (q_t-y_t) \cdot d_t\)
-
更新迭代...
-

 浙公网安备 33010602011771号
浙公网安备 33010602011771号