
强化学习-学习笔记1 | 基础概念
 这一年有一个项目需要用到强化学习来布置群智算法。这篇笔记介绍强化学习的基本概念,以及开源标准库 gym 的安装和简单使用。
这一年有一个项目需要用到强化学习来布置群智算法。这篇笔记介绍强化学习的基本概念,以及开源标准库 gym 的安装和简单使用。
1. 基本概念
1.1 概率论的基础知识
a. 随机变量
概念:是一个未知的量,值是由随机事件结果来决定的。
-
使用大写 X 来表示随机变量

如在抛硬币之前我是不知道硬币结果是什么,但是我知道事件的概率
-
使用小写 x 来表示随机变量 X 的观测值,只是表示一个数,没有随机性,如下面观测到三次抛硬币的结果
观测值:当随机事件结束,会表征出一个结果,比如硬币落地后是正 / 反面朝上
- x1 = 0
- x2 = 1
- x3 = 1
b. 概率密度函数
Probability Density Function,PDF.
意义:随机变量再某个确定的取值点附近的可能性。
举例理解:
连续分布:
如高斯分布这个连续分布
μ 为均值,σ 为标准差。
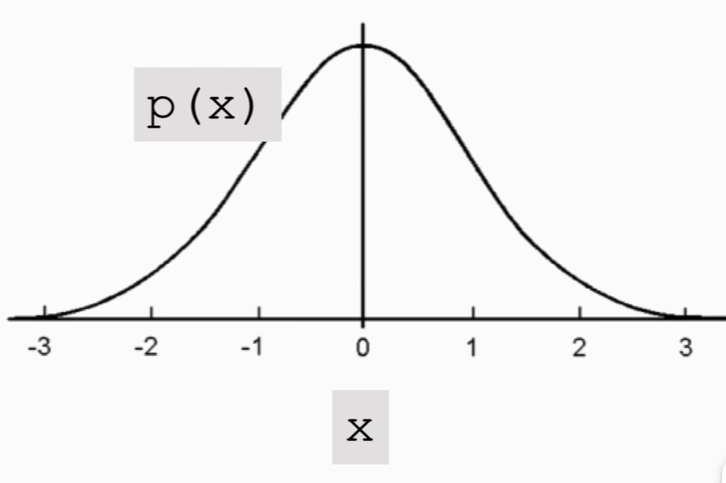
横轴是随机变量 X 取值,纵轴是概率密度,曲线是高斯分布概率密度函数P(X),说明在原点附近概率取值比较大,在远离原点附近概率取值比较小
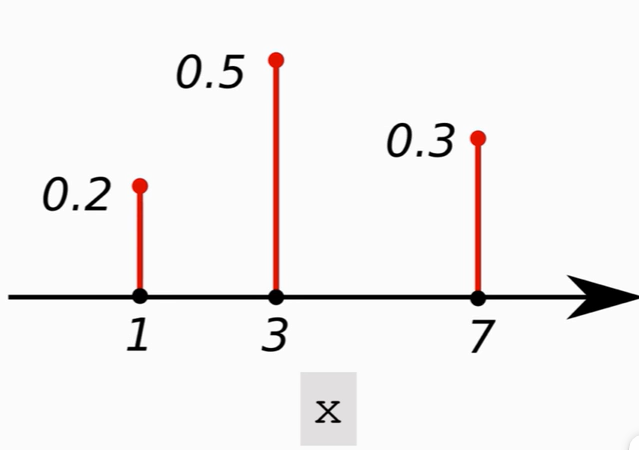
离散分布:
对于离散随机变量:X∈1,3,7
则对应的 PDF 为:
性质:
-
随机变量 X 作用域定义为花体 \(\mathcal{X}\)
-
如果 X 是连续的变量分布,则可对概率密度函数做定积分,值为1。
\[\int_{\mathcal{X}}p(x)dx=1 \] -
如果 X 是离散的变量分布,则可对 p(x) 做一个加和,值为1。
\[\sum_{x\in \mathcal{X}}p(x) = 1 \]
c. 期望
-
对于作用域 \(\mathcal{X}\) 中的随机变量 X
-
对于连续分布,函数 f(x) 的期望为:
\[\mathbb{E}[f(x)]=\int_{\mathcal{X}}p(x) \cdot f(x) dx \] -
对于离散分布,函数$$f(x)$$的期望为:
\[\mathbb{E}[f(x)]=\sum_{x\in \mathcal{X}}p(x)\cdot f(x) \]p(x) 是概率密度函数
d. 随机抽样
Random Sampling.
假设有10个球,2红,5绿,3蓝,随机抽一个球,会抽到哪个球?
在抽之前,抽到球的颜色就是个随机变量$$X$$,有三种可能取值红\绿\蓝。抽出一个球,是红色,这时候就有了一个观测值 x 。上述过程就叫随机抽样
换一个说法:
箱子里有很多个球,也不知道有多少个。做随机抽样,抽到红色球概率是0.2,绿色球概率是0.5,蓝色球概率是0.3。抽一个球,记录颜色,然后放回去摇匀,重复一百次,大概会有20个是红色,50个是绿色,蓝色有30个。这样就有统计意义。
模拟一下过程:
from numpy.random import choice
# choice函数用于抽样
samples = choice(['R','G','B'], size = 100, p = [0.2, 0.5, 0.3])
print(samples)
# 输出为
['G' 'G' 'G' 'B' 'G' 'G' 'G' 'R' 'B' 'G' 'R' 'B' 'G' 'G' 'G' 'B' 'B' 'G'
'G' 'G' 'R' 'R' 'R' 'G' 'B' 'G' 'R' 'B' 'R' 'G' 'R' 'G' 'B' 'B' 'G' 'G'
'B' 'R' 'R' 'G' 'G' 'G' 'G' 'B' 'G' 'B' 'G' 'G' 'G' 'B' 'G' 'B' 'R' 'R'
'G' 'G' 'B' 'B' 'G' 'G' 'B' 'B' 'R' 'G' 'G' 'G' 'B' 'B' 'G' 'G' 'B' 'G'
'G' 'G' 'G' 'G' 'B' 'G' 'R' 'B' 'G' 'G' 'G' 'B' 'G' 'R' 'B' 'R' 'B' 'G'
'G' 'B' 'G' 'R' 'G' 'G' 'G' 'G' 'G' 'G']
1.2 强化学习术语 / Terminologies
a. state与action
假设在玩超级玛丽
状态state $$s$$ 可以表示为当前游戏这一帧的画面

观测到状态后可以做出相应动作action $$ a \in {{left, right, up} }$$
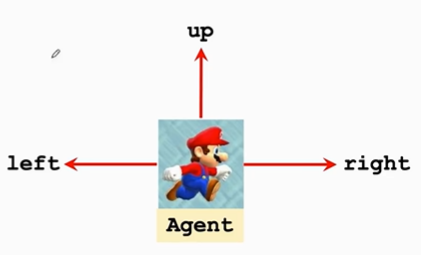
这个例子中马里奥被称为agent,若在自动驾驶中,汽车就被称为agent。动作谁做的就被称为agent。
b. 策略policy
$policy \space \pi \(,指根据观测到的状态,然后做出决策,来控制 agent 运动。\)\(\pi\)$是一个概率密度函数。
-
数学定义:\(\pi :(s,a) \mapsto [0,1]:\)\(\pi(a|s) = \mathbb{P}(A=a|S=s)\)
-
意思给定状态 \(s\),做出动作 \(a\) 的概率密度
-
比如给定一个马里奥的运行状态图
\(\pi(left|s) =0.2\)向左概率是0.2
\(\pi(right|s)=0.1\)向右概率是0.1
\(\pi(up|s)=0.7\)向上概率是0.7
-
如果让策略函数自动来操作,它就会做一个随机抽样,0.2的概率向左,0.1的概率向右,0.5的概率向上。
-
强化学习就是学习这个策略函数。
-
给定观测到的状态state \(S=s\),agent的action \(A\)可以是随机的(最好是随机)
c. 奖励reward
agent做出一个动作,游戏就会给一个奖励,奖励通常需要自己来定义。奖励定义好坏非常影响强化学习结果。
例如在马里奥例子中:
- 马里奥吃到一个金币:\(R=+1\)。
- 赢了这场游戏:\(R=+10000\)。
- 碰到敌人 goomba,game over:\(R=-10000\)。
- 啥也没发生:\(R=0\)。
强化学习目标就是奖励获得的总额尽量要高。
d. 状态转移 state transition
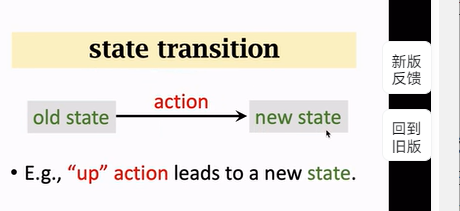
当前状态下,马里奥做一个动作,游戏就会给出一个新的状态。比如马里奥跳一下,屏幕当前帧就不一样了,也就是状态变了。这个过程就叫状态转移。
-
状态转移可以确定的也可以是随机的。
-
状态转移的随机性来自于环境,这里环境就是游戏的程序,程序决定下一个状态是什么。
-
状态转移函数:\(p(s'|s,a)=\mathbb{P}(S'=s'|(S=s,A=a))\)
意为观测到当前状态 \(s\) 与动作 \(a\) ,\(p\) 函数输出状态 \(s'\) 的概率。
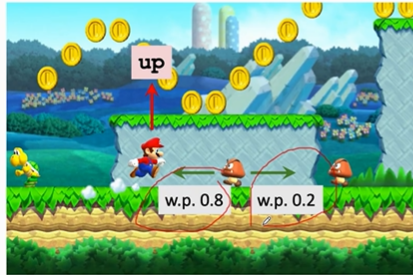
如果马里奥向上跳后,goomba向左和向右的概率分别是0.8和0.2,这个状态转移函数只有环境知道,玩家是不知道的。
e. 交互
agent environment interaction.
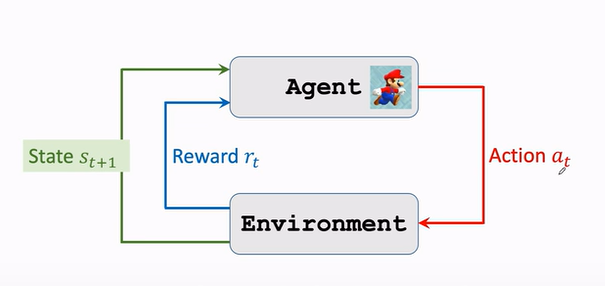
- 环境告诉Agent一个状态\(s_t\)
- agent看到状态$$s_t$$之后,做出一个动作\(a_t\)
- agent做出动作后,环境会更新状态为\(s_{t+1}\),同时给出一个奖励\(r_t\)。
1.3 强化学习中的随机性
随机性有两个来源:
- agent动作的随机性
- 状态转移的随机性
第一个随机性是从agent动作来的,因为动作是根据 policy 函数随机抽样得来的。
-
\(\pi(left / s)=0.2\)
-
\(\pi(right / s)=0.1\)
-
\(\pi(up / s)=0.7\)
-
agent可能做其中任何一个中动作,但动作概率有大有小。
另一个随机性来源是状态转移。
- 假定agent做出一个动作,那么环境就要生成一个新状态\(S'\)。
- 环境用状态转移函数 \(p\) 算出概率,然后用概率来随机抽样来得到下一个状态
1.4 用AI玩游戏
通过强化学习得到的 policy 函数\(\pi\),来控制 agent:
-
观测到当前的状态 s1
-
ai 通过 policy 函数 随机抽样 做出 动作 a1(例子中的 左、右、上)
-
environment 会生成一个 下一个状态 s2,并给 agent 一个奖励 r1
值得注意的是,这个 \(r_1\) 是什么时候给的?
是在状态 state \(s_2\) 的时候给的。
-
ai 继续以新的状态 作为输入,生成下一个动作 a2
-
.......
-
循环直到游戏结束(赢或者输)
通过上面的步骤可以得到一个 (state, action, reward) 轨迹Trajectory(序列):
s1,a1,r1,s2,a2,r2,⋯,st,at,rt
1.5 Reward && Return
Reward 在上面介绍过, Return 是 Reward 的线性组合。
a. Return 的定义
Return 回报,又被称为cumulative future reward,未来的累计奖励
-
\[U_t = R_t+R_{t+1}+R_{t+2}+\cdots \]
把从 t 时刻开始的奖励全都加起来,一直加到游戏结束的最后一个奖励。
不过我们要想一个事情:
对于 Ut 而言,Rt 和 Rt+1 同样重要吗?
- 假设有两个选项
- 立马给你一百块
- 一年后给你一百块
一般大多数人会选立刻拿到100块,因为未来的不确定性很大。
如果改成现在给你80,或者一年后给你100块,这时候就不像上面那么肯定了。
这说明, Ut 的各个求和项,未来的奖励不如现在的奖励好,应当打一个折扣。即:Rt+1 的 权重Weights 要小于 Rt。
所以我们针对这个考虑进行一个调整,对 Rt+1 以后进行一个权重调整,也即 强化学习中的 Discounted Return.
Discounted Return,折扣回报,也被称为:cumulative discounted future reward
-
折扣率称为 \(\gamma\),该值介于0到1之间,是一个超参数,决定未来回报的重要程度。
-
调整之后的 Return 为:
\[U_t=R_t+\gamma R_{t+1}+\gamma^2 R_{t+2}+\gamma^3 R_{t+3}+\cdots \]
关于公式的字母表达问题:
假如游戏已经结束了,所有的奖励都观测到了,那么奖励就都是数值,用小写 r 表示。
如果在 t 时刻游戏还没有结束,这些奖励就还都是随机变量,就用大写字母 R 来表示奖励。
回报 U 依赖于奖励 R,所以它也是个随机变量,也要用大写字母表示。
b. 回报的随机性 Randomness in Returns
- \(U_t = R_t + \gamma{}R_{t+1}+\gamma^2 R_{t+2} + \gamma^3 R_{t+3} + ...\)
上面1.3 提到 随机性 有两个来源:
-
动作是随机的
\(\mathbb{P}[A=a|S=s]=\pi(a|s)\)
-
下一个状态是随机的
\(\mathbb{P} [S'=s'|S=s,A=a]=p(s'|s,a)\)
对于任意时刻的 $ i\geq t$,奖励 \(R_i\) 取决于 \(S_i\) 和 $$A_i$$,而回报 \(U\) 又是未来奖励的总和。
因此,观测到 t 时刻状态 \(s_t\),回报 \(U_t\) 就依赖于如下随机变量
- $ A_t, A_{t+1}, A_{t+2},\cdots $$和 $$S_{t+1},S_{t+2},\cdots$
1.6 价值函数
a. 由来
Action-Value Function \(Q(s,a)\)
上面说到Discounted Return 折扣回报,cumulative discounted future reward
- \(U_t=R_t+\gamma R_{t+1}+\gamma^2 R_{t+2}+\gamma^3 R_{t+3}+\cdots\)
\(U_t\)是个随机变量,在 t 时刻并不知道它的值是什么,那如何评估当前形势?
可以对$$U_t$$求期望,把里面的随机性都给积掉,得到的就是个实数。打个比方就是抛硬币之前,不知道结果是什么,但知道正反面各有一半的概率,正面记作1,反面记作0,得到的期望就是0.5。
同样对 \(U_t\) 求期望,就可以得到一个数,记作 \(Q_\pi\)
这个期望怎么求的?
-
把 \(U_t\) 当作未来所有动作 \(A\) 和状态 \(S\) 的一个函数,未来动作 \(A\) 和状态 \(S\) 都有一个随机性;
-
动作 \(A\) 的概率密度函数是策略函数 (policy函数)
$ \mathbb{P}(A=a|S=s) = \pi(a|s)$ ;
-
状态$$S$$的概率密度函数是状态转移函数 \(\mathbb{P}(S'=s'|S=s,A=a) = p(s'|s,a)\)
-
期望就是对这些 \(A\) 和 \(S\) 求的,把这些随机变量都用积分给积掉,这样除了 \(S_t\) 与 \(A_t\),其余所有的随机变量 (\(A_{t+1},A_{t+2},\cdots\) 和 \(S_{t+1},S_{t+2},\cdots\)) 都被积掉了。
求期望得到的函数就被称为动作价值函数
\(Q_\pi(s_t,a_t)=\mathbb{E}[U_t | S_t=s_t,A_t = a_t]\).
-
价值函数依赖于什么呢?
-
\(S_t\) 和 \(A_t\)
\(S_t\) 与 \(A_t\) 被当作被作为观测到的数值来对待,而不是随机变量,所以没有被积分积掉。 $$Q_\pi$$ 的值依赖于 \(S_t\) 和 \(A_t\) 。
-
策略函数 Policy
积分的时候会用到 Policy 函数\(\pi\)。
-
b. 动作价值函数
Action-value function.
对于策略 \(\pi\),动作价值函数定义如下
- \(Q_\pi(s_t,a_t) = \mathbb{E}[U_t|S_t=s_t,A_t=a_t]\)
- \(Q_\pi\)依赖于当前动作\(a_t\)与状态\(s_t\),还依赖于策略函数\(\pi\) (积分时会用到它,\(\pi\)不一样,得到的\(Q_\pi\)就不一样)。
- 直观意义:如果用策略函数\(\pi\),那么在\(s_t\)这个状态下做动作\(a_t\),是好还是坏。它会给当前状态下每个动作打分,这样就知道哪个动作好那个动作差。
动作价值函数依赖于\(\pi\),那么如何去掉 \(\pi\) ?
可以对 \(Q_\pi\) 关于 \(\pi\) 求最大化。意思就是可以有无数种策略函数 \(\pi\),但我们要采用最好的那一种策略函数,即让 \(Q_\pi\) 最大化的那个函数。
\(Q_{\pi}\)最大化的那个函数为:最优动作价值函数 Optimal action-value Function 。
- \(Q^*(s_t,a_t) = \mathop{max}\limits_{\pi}Q_\pi(s_t,a_t)\)
- 直观意义:对动作 a 做评价,如果当前状态是 \(s_t\),\(Q*\) 会告诉我们动作 \(a_t\) 好不好。agent就可以拿 Q* 对动作的评价来作决策。
c. 状态价值函数
State-value function. 状态价值函数 \(V_\pi\)是动作价值函数\(Q_\pi\)的期望。
- \(V_π(s_t)=E_A[Q_π(s_t,A)]\)
- 而\(Q_\pi\) 与策略函数 \(\pi\) ,状态 \(s_t\) 和动作 \(a_t\) 都有关,可以将 A 作为随机变量,对 A 求期望消掉 A, 这样 \(V_\pi\) 就只与 \(\pi\) 和 \(s\) 有关。
直观意义:告诉我们当前局势好不好,比如下围棋,当前是快赢了还是快输了。评价的是当前的 state。
这里期望是关于随机变量 A 求的,它的概率密度函数是
\(π(⋅∣s_t)\),根据期望定义(线性可加性),可以写成连加或者积分的形式。
如果动作是离散的,如上下左右:
-
\(V_\pi(s_t) = \mathbb{E_A}[Q_\pi(s_t,A)]=\sum_a\pi(a|s_t)\cdot{Q_\pi}(s_t,a)\)
这里动作是离散的。
如果动作是连续的,如方向盘角度,从正90度到负90度。
-
\(V_\pi(s_t) = \mathbb{E_A}[Q_\pi(s_t,A)]=\int\pi(a|s_t)\cdot {Q_\pi}(s_t,a)da\)
这里动作是连续的
d. 总结
-
动作价值函数\(Q_\pi(s_t,a_t) = \mathbb{E}[U_t|S_t=s_t,A_t=a_t]\)
它跟策略函数 \(\pi\),状态 \(s_t\),动作 \(a_t\)有关,是 \(U_t\) 的条件期望。
能告诉我们处于状态 s 时采用动作 a 是否明智,可以给动作 a 打分。
-
状态价值函数\(V_{\pi}(s_t) = \mathbb{E}_A[Q_\pi(s_t,A)]\)
它是把\(Q_\pi\)中把 A 用积分给去掉,这样变量就就只剩状态 s 。它跟策略函数 \(\pi\),状态 \(s_t\) 有关,跟动作 \(a_t\) 无关。
能够评价当前局势是好是坏,也能评价策略函数的好坏,如果 \(\pi\) 越好,则 \(V_\pi\) 期望值\(\mathbb{E}_S[V_\pi(S)]\)越大。
1.7 如何用强化学习玩游戏
a. 两种学习方式
假设在马里奥游戏中,目标在于尽可能吃金币,避开敌人,通关。如何做?
-
一种是学习一个策略函数 \(\pi(a|s)\),这叫 policy basement learning 策略学习,然后基于此来控制agent做动作。
每观测到一个状态 \(s_t\),就把 \(s_t\) 作为 \(\pi(\cdot|s)\) 函数输入,\(\pi\) 函数输出每一个动作的概率,基于概率来 随机采样 获取动作 \(a_t\),让agent 来执行这个\(a_t\)。
-
另一种是学习最优动作价值函数\(Q^*(s,a)\),这叫 value basement learning 价值学习,它告诉如果处于状态s,做动作a是好还是坏。
每观测到一个状态 \(s_t\),把 \(s_t\) 作为 \(Q^*(s,a)\) 函数输入,让 \(Q^*(s,a)\) 对每一个动作做一个评价,得到每个动作的 Q 值。选择输出值最大的动作,\(a_t = argmax_a Q^*(s_t,a)\),因为 Q 值是对未来奖励总和的期望,如果向上动作 Q 值比其他动作 Q 值要大就说明向上跳的动作会在未来获得更多的奖励。
b. OpenAI Gym
OpenAI Gym https://gym.openai.com 是强化学习最常用的标准库。如果得到了 \(\pi\) 函数或者 \(Q*\) 函数,就可以用于Gym的控制问题和小游戏,来测试算法的优劣。
按照官方文档,安装 gym,就可以用 python 调用 gym 的函数。
安装 gym 想专门另开一篇笔记来记录,目前跑视频教程里的demo还是可以的。
简易安装过程:
pip install gym==0.15.7 -i http://mirrors.aliyun.com/pypi/simple --trusted-host mirrors.aliyun.com
截止2022-07-03,gym最新版本是0.21,但由于我的 python 环境为 3.6.4,所以我的 gym版本需要下降。
我的 pip 最近总是连接不到远端库,执行
pip install 库会报错:Retrying (Retry(total=0, connect=None, read=None, redirect=None, status=None)) after connection broken by 'SSLError(SSLError(1, u'[SSL: CERTIFICATE_VERIFY_FAI LED] certificate verify failed (_ssl.c:726)'),)': /packages/0f/fb/6aecd2c8c9d0ac 83d789eaf9f9ec052dd61dd5aea2b47ffa4704175d7a2a/psutil-5.4.8-cp27-none-win_amd64. whl所以需要命令行后面的部分。
然后其他的东西我还没有装。如果装了会更新在安装笔记里。参考教程为:
- https://blog.csdn.net/weixin_33654339/article/details/113538141
- Gym Documentation (gymlibrary.ml)
- https://github.com/openai/gym
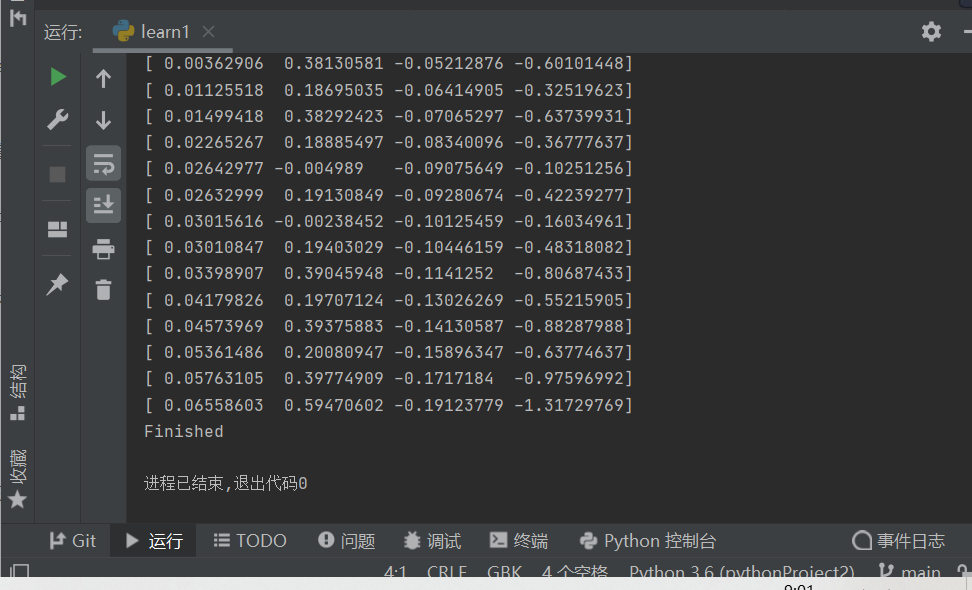
c. gym 例程
import gym
import time
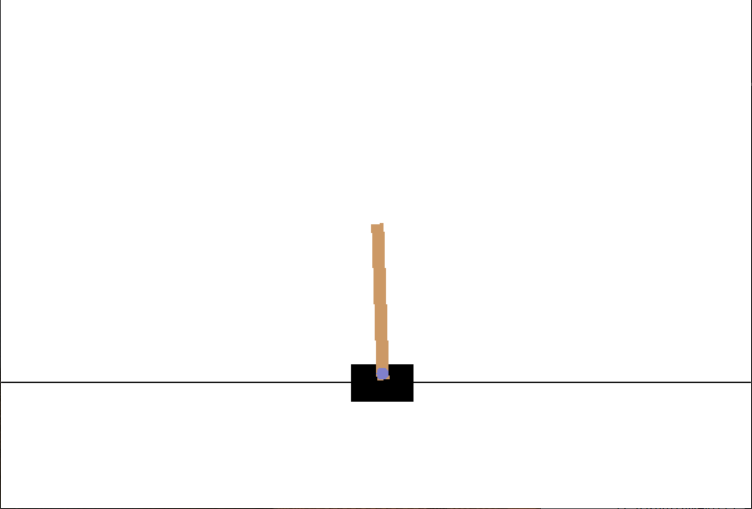
# 生成 CartPole 环境
env = gym.make('CartPole-v0')
# 重置环境
state = env.reset()
# 这里的循环就是上面 s,a,r的过程
for t in range(10000):
# 弹出窗口来显示游戏情况
env.render()
print(state)
# 随机均匀抽样一个动作记为 action
# 这里是为了图方便,实际应用应该通过policy函数或者Q*来选择。
action = env.action_space.sample()
# 把action输入到step()函数,即agent执行这个动作
state,reward,done,info = env.step(action)
# 为了不让窗口太快消失
time.sleep(1)
if done:
print("Finished")
break
env.close()
运行效果:
如何在Typora 中使用行内公式:
- 以前只会使用行间公式,但在这篇笔记里十分不方便,查了一下。
- 在偏好设置-> markdown -> 勾选内联公式。
- 需要关闭文件重启一下才能看到效果。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号