STM32 Win10下搭建嵌入式ARM开发环境
STM32 Win10下搭建嵌入式ARM开发环境
一个嵌入式应用的开发一般由如下几个环节构成:
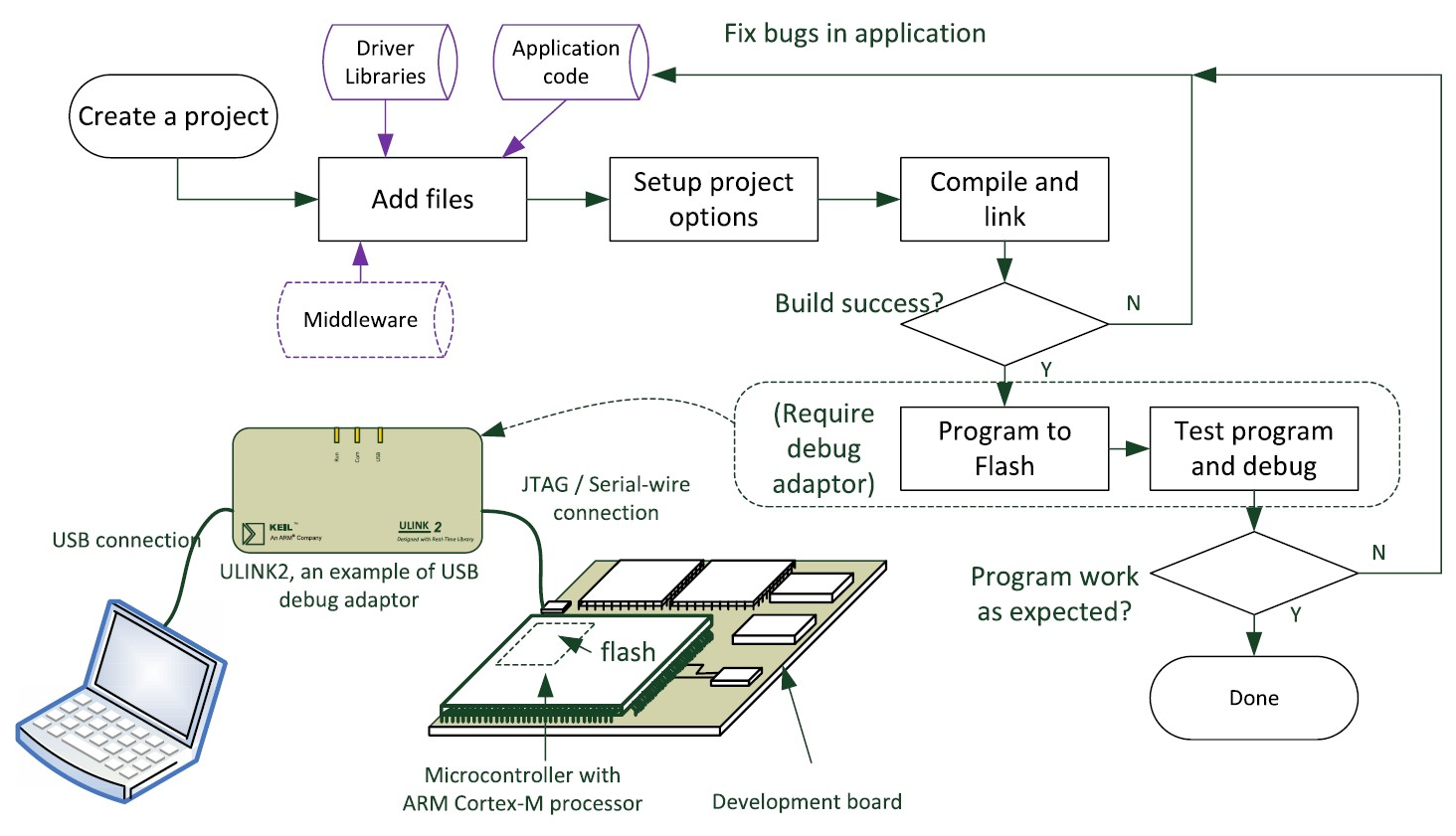
- 创建工程,将中间件、应用代码、驱动代码添加至工程中
- 配置工程的编译选项,编译并连接,生成二进制目标码
- 将PC通过仿真器与开发板连接,将二进制目标码通过仿真器传输至芯片flash
- 测试并修改bug,直到完成预期目标
这个过程中,工程文件一般为文本文件,与平台无关,编译和连接过程与平台相关,烧写调试过程与平台相关。因此一个便于移植的工程应尽可能将工程文件和工程配置文件独立出来,在其他开发环境开发时只需要配置好编译连接工具链和烧写调试工具即可进行开发,而尽可能较少对IDE的依赖,同时要考虑到商业授权等因素。
因此这里搭建的STM32开发环境为:
- (1) 编写工程文件和配置文件(.c,.s,.a,.lib,makefile,.ld,.scatter)
- (2) 准备文本编辑器的配置(VScode)
- (3) 安装编译连接工具链(arm-gcc)
- (4) 安装下载调试工具(stlink+openocd)
其中(1)为工程文件,与路径和平台无关,在配置好(2)(3)(4)后即可实现开发,实际开发时只需关注(1)即可。
编译流程梳理
一个ARM嵌入式程序的编译需要以下几个环节:

- 由C语言源码和汇编代码经过编译器生成obj文件(.o), 目标文件(.o)通常以ELF格式保存,里面包含了对各个函数的入口标记,描述等
- 由内存地址分配文件即Linker,Scatter(.ld,.scat)和.o文件经连接器进行连接,得到可执行镜像文件(.elf,.out,.axf)以及二进制镜像文件(.bin)和其他描述文件等
- elf文件包含了程序的相关信息,包括入口地址等等
- axf文件是ARM芯片使用的文件格式,它包含bin代码外,还包括了调试信息。
考虑开发环境以及平台移植性等等因素,开发嵌入式应用应尽量使用文本编辑器+交叉编译工具链+烧录工具的方式,这样可以尽可能避免由于操作系统或IDE更新等造成工程编译失败等问题。
交叉编译工具链
交叉编译工具链是一个由编译器、连接器和解释器组成的综合开发环境,交叉编译工具链可以代替IDE的编译和连接等工作。
交叉编译工具链的命名规则为:arch [-vendor] [-os] [-(gnu)eabi]
- arch - 体系架构,如ARM,MIPS
- vendor - 工具链提供商
- os - 目标操作系统
- eabi - 嵌入式应用二进制接口(Embedded Application Binary Interface)
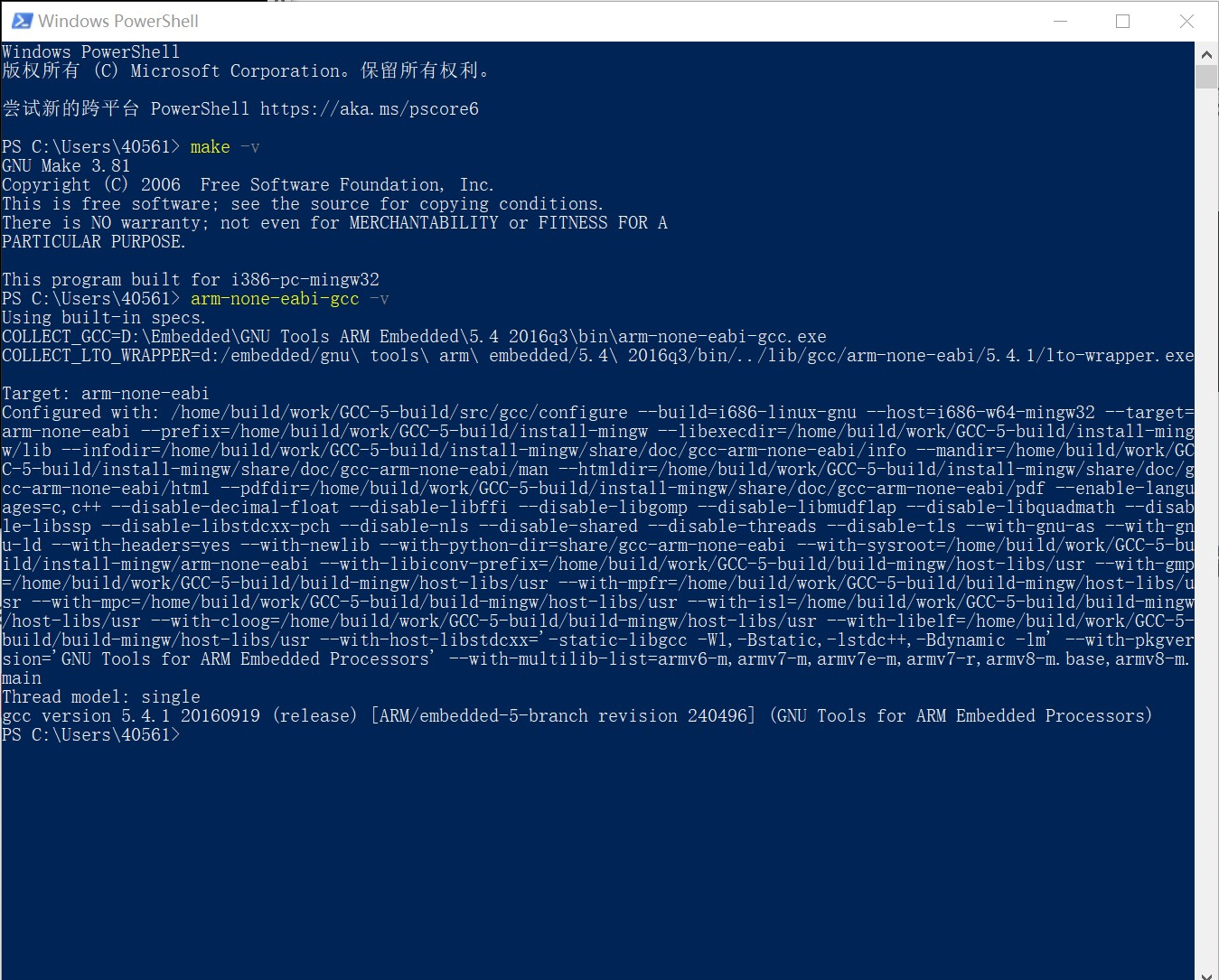
以windows下开发为例,则该工具链应为:arm-none-eabi-gcc,即ARM架构,无提供商,无操作系统(os未指定),eabi格式。
GNU提供了ARM的交叉编译工具链的下载:
GNU Arm Embedded Toolchain
交叉编译工具链安装完成后,将安装目录下的.\bin路径添加至环境变量,重启电脑后可以在win10的PowerShell或者CMD中使用arm-none-eabi-gcc -v查看是否安装成功。
我们还需要Make工具来实现我们对Makefile的操作,GNU中提供了windows下的make工具:
选择其中的Complete package, except sources进行下载,安装后将安装路径下的.\bin添加环境变量,使用make -v查看安装是否成功。
使用Makefile创建工程
通过编写Makefile文件可以对项目工程的编译链接过程进行控制,这里使用CubeMX来生成一个STM32的Makefile工程,简化配置的过程,其他ARM项目可以自行编写Makefile文件进行配置,关于CubeMX的使用这里不做介绍。
CubeMX中我们选择STM32F407ZGTx芯片,配置RCC时钟为HSE选择Crystal,输入时钟为8M,主PLL为168M,开发板的LED对应GPIO为PG9,配置GPIO为输出模式。修改main.c的代码实现一个LED闪烁:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2019 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
static uint8_t fac_us=0;//us延时倍乘数
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void delay_us(uint32_t nus)
{
uint32_t temp;
SysTick->LOAD=nus*fac_us; //时间加载
SysTick->VAL=0x00; //清空计数器
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //开始倒数
do
{
temp=SysTick->CTRL;
}
while((temp&0x01)&&!(temp&(1<<16)));//等待时间到达
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
void delay_ms(uint16_t nms)
{
delay_us((uint32_t)(nms*1000)); //普通方式延时
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
delay_ms(500);
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_9, GPIO_PIN_RESET);
delay_ms(500);
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_9, GPIO_PIN_SET);
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 8;
RCC_OscInitStruct.PLL.PLLN = 168;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOG_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_9, GPIO_PIN_RESET);
/*Configure GPIO pin : PG9 */
GPIO_InitStruct.Pin = GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOG, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
使用make指令编译后的输出:
arm-none-eabi-size build/demo_project.elf
text data bss dec hex filename
4376 20 1572 5968 1750 build/demo_project.elf
arm-none-eabi-objcopy -O ihex build/demo_project.elf build/demo_project.hex
arm-none-eabi-objcopy -O binary -S build/demo_project.elf build/demo_project.bin
Shell及下载调试配置
shell
由于Win10的PowerShell的操作指令并不等同于Linux,因此make clean中的rm无法被正确执行,未避免这个麻烦,安装Msys2:
根据计算机平台选择下载,这里选择x86_64,在msys2文件夹下有msys2_shell.cmd,用记事本打开,把第16行rem set MSYS2_PATH_TYPE=inherit的rem去掉,改成set MSYS2_PATH_TYPE=inherit ,这样可以使用windows路径,双击msys2_shell.cmd即可使用shell
下载
将bin文件下载可以使用OpenOCD,由于我们使用的是STM32,也可以使用官方工具STM32 ST-LINK Utility.exe工具对flash进行下载,ST公司同样提供了官方下载器的命令行版本ST-LINK_CLI.exe,使用方法在STM32 ST-LINK Utility.exe的帮助文档中有介绍,将下面的语句
"D:\Embedded\STMicroelectronics\STM32 ST-LINK Utility\ST-LINK Utility\ST-LINK_CLI.exe" -c SWD UR -ME -P "./OBJ/cristal_stm32.hex" -V -Rst
pause
添加至一个新建的批处理文件download.bat中,在shell中执行./download.bat即可下载:
$ ./download.bat
d:\Embedded\STM32CubeIDE\workspace_1.0.0\demo_project>"D:\Embedded\STMicroelectronics\STM32 ST-LINK Utility\ST-LINK Utility\ST-LINK_CLI.exe" -c SWD UR -ME -P "./build/demo_project.hex" -V -Rst
STM32 ST-LINK CLI v1.5.1
STM32 ST-LINK Command Line InterfaceConnected via SWD.
Connexion mode : Connect Under Reset.
ST-LINK Firmware version : V2J27S6
Device ID:0x413
Device flash Size : 1024 Kbytes
Device family :STM32F40x/STM32F41xFull chip erase...
Flash memory erased.Flash Programming:
File : ./build/demo_project.hex
Address : 0x08000000
Flash Programming...
圹圹圹圹圹圹圹圹圹圹圹圹圹圹圹圹圹圹圹圹圹圹圹圹北 100%
Verification...
北北北北北北北北北北北北北北北北北北北北北北北北北?100%
Flash memory programmed in 0s and 547ms.
Verification...OK
Programming Complete.MCU Reset.
d:\Embedded\STM32CubeIDE\workspace_1.0.0\demo_project>pause
请按任意键继续. . .
调试
调试工具使用OpenOCD,OpenOCD是开放式片上调试器,旨在为嵌入式目标器件提供调试,系统内编程和边界扫描测试,支持多种JTAG,SWD接口的仿真调试器,根据官网可知OpenOCD是支持STlink的,这里下载OpenOCD是源码:
OpenOCD - Open On-Chip Debugger
这里可以得到预编译后的工具:
http://gnutoolchains.com/arm-eabi/openocd/
解压缩后将.\bin添加至环境变量即可使用,在cmd使用openocd -v检查是否安装成功。
在工程路径下创建OcdStm32.cfg文件:
interface stlink-v2 #调试器的名字,在openocd-0.10.0\scripts\interface里找
transport select swd #接口名,swd或jtag
source [find target/stm32f4x.cfg] #芯片类型,在openocd-0.10.0\scripts\target里找
创建一个ocd_init.bat文件:
openocd -f interface/stlink-v2.cfg -f target/stm32f4x.cfg
控制台中执行.\ocd_init.bat可以启动仿真器:
D:\Embedded\STM32CubeIDE\workspace_1.0.0\demo_project>openocd -f interface/stlink-v2.cfg -f target/stm32f4x.cfg
Open On-Chip Debugger 0.10.0 (2019-10-29) [https://github.com/sysprogs/openocd]
Licensed under GNU GPL v2
libusb1 09e75e98b4d9ea7909e8837b7a3f00dda4589dc3
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
WARNING: interface/stlink-v2.cfg is deprecated, please switch to interface/stlink.cfg
Info : auto-selecting first available session transport "hla_swd". To override use 'transport select'.
Info : The selected transport took over low-level target control. The results might differ compared to plain JTAG/SWD
Info : Listening on port 6666 for tcl connections
Info : Listening on port 4444 for telnet connections
Info : clock speed 2000 kHz
Info : STLINK V2J27S6 (API v2) VID:PID 0483:3748
Info : Target voltage: 3.209980
Info : stm32f4x.cpu: hardware has 6 breakpoints, 4 watchpoints
Info : Listening on port 3333 for gdb connections
出现hardware has 6 breakpoints, 4 watchpoints即启动成功
VScode配置
在工程路径的.vscode文件夹下打开c_cpp_properties.json文件,没有自己新建一个,内容配置如下:
{
"configurations": [
{
"name": "STM32",
"includePath": [
"C:/Program Files (x86)/keil/ARM/ARMCC/**",
"${workspaceFolder}/**",
""
],
"browse": {
"limitSymbolsToIncludedHeaders": true,
"databaseFilename": "${workspaceRoot}/.vscode/.browse.c_cpp.db",
"path": [
"C:/Program Files (x86)/keil/ARM/ARMCC/**",
"${workspaceFolder}/**",
""
]
},
"defines": [
"_DEBUG",
"UNICODE",
"_UNICODE",
"__CC_ARM"
],
"intelliSenseMode": "msvc-x64"
}
],
"version": 4
}
其中,需要在includePath和path中添加头文件路径,${workspaceFolder}/**是工程路径,不用改动,额外需要添加的是keil的头文件路径
然后在defines中添加宏,也就是在keil的Options for Target的C++选项卡中配置的宏
然后就可以体验VS Code强大的代码提示,函数跳转等功能了(甩keil的编辑器一整个时代)
在VsCode中,使用快捷键ctrl+shift+p搜索setting,找到“首选项:打 开设置(json)”。点击会进入一个文件,把这两行添加进去,注意msys2_shell.cmd的地址。
{
"terminal.integrated.shell.windows":"D:/Embedded/GNU Tools ARM Embedded/msys64/msys2_shell.cmd",
"terminal.integrated.shellArgs.windows": ["-defterm", "-mingw32", "-no-start", "-here"],
}
即可在VScode中使用msys2终端。
配置调试工具:
在launch.json配置中添加下面的代码:
{
// 使用 IntelliSense 了解相关属性。
// 悬停以查看现有属性的描述。
// 欲了解更多信息,请访问: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": [
{
"name": "ARM Debug",
"type": "cppdbg",
"request": "launch",
"program": "${workspaceFolder}/build/${workspaceRootFolderName}.elf",
"cwd": "${workspaceFolder}",
"externalConsole": true,
"MIMode": "gdb",
"miDebuggerPath": "D:/Embedded/GNU Tools ARM Embedded/5.4 2016q3/bin/arm-none-eabi-gdb.exe", //交叉编译工具链地址
"setupCommands": [
{
"text": "file D:/Embedded/STM32CubeIDE/workspace_1.0.0/demo_project/build/demo_project.elf", //工程使用绝对地址
},
{
"text": "target remote localhost:3333", //调试器端口号
},
//以下命令根据不同的单片机可能有变化,例如STM32F1就不行,需要更换命令,STM32F4可以。gdb是可以手动用命令行执行的,这部分就是需执行的命令。百度,谷歌可以找到的。
{
"text": "monitor reset",
},
{
"text": "monitor halt",
},
{
"text": "load",
}
],
"preLaunchTask": "build"
}
]
}
在CTRL+SHIFT+P中搜索task,配置任务,进入后选择others,则在工程路径下的.vscode路径下新建一个task.json,内容如下:
{
// See https://go.microsoft.com/fwlink/?LinkId=733558
// for the documentation about the tasks.json format
"version": "2.0.0",
"tasks": [
{
"label": "build",
"type": "shell",
"command": "echo compile exeover&make -j4"
}
]
}
全流程演示
打开终端(ctrl + ~),执行make clean:
$ make clean
rm -fR build
执行make:
$ make
mkdir build
arm-none-eabi-gcc -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -DUSE_HAL_DRIVER -DSTM32F407xx -IInc -IDrivers/STM32F4xx_HAL_Driver/Inc -IDrivers/STM32F4xx_HAL_Driver/Inc/Legacy -IDrivers/CMSIS/Device/ST/STM32F4xx/Include -IDrivers/CMSIS/Include -IDrivers/CMSIS/Include -Og -Wall
-fdata-sections -ffunction-sections -g -gdwarf-2 -MMD -MP -MF"build/main.d" -Wa,-a,-ad,-alms=build/main.lst Src/main.c -o build/main.o
arm-none-eabi-gcc -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -DUSE_HAL_DRIVER -DSTM32F407xx -IInc -IDrivers/STM32F4xx_HAL_Driver/Inc -IDrivers/STM32F4xx_HAL_Driver/Inc/Legacy -IDrivers/CMSIS/Device/ST/STM32F4xx/Include -IDrivers/CMSIS/Include -IDrivers/CMSIS/Include -Og -Wall
-fdata-sections -ffunction-sections -g -gdwarf-2 -MMD -MP -MF"build/stm32f4xx_it.d" -Wa,-a,-ad,-alms=build/stm32f4xx_it.lst Src/stm32f4xx_it.c -o build/stm32f4xx_it.o
arm-none-eabi-gcc -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -DUSE_HAL_DRIVER -DSTM32F407xx -IInc -IDrivers/STM32F4xx_HAL_Driver/Inc -IDrivers/STM32F4xx_HAL_Driver/Inc/Legacy -IDrivers/CMSIS/Device/ST/STM32F4xx/Include -IDrivers/CMSIS/Include -IDrivers/CMSIS/Include -Og -Wall
-fdata-sections -ffunction-sections -g -gdwarf-2 -MMD -MP -MF"build/stm32f4xx_hal_msp.d" -Wa,-a,-ad,-alms=build/stm32f4xx_hal_msp.lst Src/stm32f4xx_hal_msp.c -o build/stm32f4xx_hal_msp.o
arm-none-eabi-gcc -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -DUSE_HAL_DRIVER -DSTM32F407xx -IInc -IDrivers/STM32F4xx_HAL_Driver/Inc -IDrivers/STM32F4xx_HAL_Driver/Inc/Legacy -IDrivers/CMSIS/Device/ST/STM32F4xx/Include -IDrivers/CMSIS/Include -IDrivers/CMSIS/Include -Og -Wall
-fdata-sections -ffunction-sections -g -gdwarf-2 -MMD -MP -MF"build/stm32f4xx_hal_tim.d" -Wa,-a,-ad,-alms=build/stm32f4xx_hal_tim.lst Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_tim.c -o build/stm32f4xx_hal_tim.o
arm-none-eabi-gcc -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -DUSE_HAL_DRIVER -DSTM32F407xx -IInc -IDrivers/STM32F4xx_HAL_Driver/Inc -IDrivers/STM32F4xx_HAL_Driver/Inc/Legacy -IDrivers/CMSIS/Device/ST/STM32F4xx/Include -IDrivers/CMSIS/Include -IDrivers/CMSIS/Include -Og -Wall
-fdata-sections -ffunction-sections -g -gdwarf-2 -MMD -MP -MF"build/stm32f4xx_hal_tim_ex.d" -Wa,-a,-ad,-alms=build/stm32f4xx_hal_tim_ex.lst Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_tim_ex.c -o build/stm32f4xx_hal_tim_ex.o
arm-none-eabi-gcc -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -DUSE_HAL_DRIVER -DSTM32F407xx -IInc -IDrivers/STM32F4xx_HAL_Driver/Inc -IDrivers/STM32F4xx_HAL_Driver/Inc/Legacy -IDrivers/CMSIS/Device/ST/STM32F4xx/Include -IDrivers/CMSIS/Include -IDrivers/CMSIS/Include -Og -Wall
-fdata-sections -ffunction-sections -g -gdwarf-2 -MMD -MP -MF"build/stm32f4xx_hal_rcc.d" -Wa,-a,-ad,-alms=build/stm32f4xx_hal_rcc.lst Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_rcc.c -o build/stm32f4xx_hal_rcc.o
arm-none-eabi-gcc -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -DUSE_HAL_DRIVER -DSTM32F407xx -IInc -IDrivers/STM32F4xx_HAL_Driver/Inc -IDrivers/STM32F4xx_HAL_Driver/Inc/Legacy -IDrivers/CMSIS/Device/ST/STM32F4xx/Include -IDrivers/CMSIS/Include -IDrivers/CMSIS/Include -Og -Wall
-fdata-sections -ffunction-sections -g -gdwarf-2 -MMD -MP -MF"build/stm32f4xx_hal_rcc_ex.d" -Wa,-a,-ad,-alms=build/stm32f4xx_hal_rcc_ex.lst Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_rcc_ex.c -o build/stm32f4xx_hal_rcc_ex.o
arm-none-eabi-gcc -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -DUSE_HAL_DRIVER -DSTM32F407xx -IInc -IDrivers/STM32F4xx_HAL_Driver/Inc -IDrivers/STM32F4xx_HAL_Driver/Inc/Legacy -IDrivers/CMSIS/Device/ST/STM32F4xx/Include -IDrivers/CMSIS/Include -IDrivers/CMSIS/Include -Og -Wall
-fdata-sections -ffunction-sections -g -gdwarf-2 -MMD -MP -MF"build/stm32f4xx_hal_flash.d" -Wa,-a,-ad,-alms=build/stm32f4xx_hal_flash.lst Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_flash.c -o build/stm32f4xx_hal_flash.o
arm-none-eabi-gcc -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -DUSE_HAL_DRIVER -DSTM32F407xx -IInc -IDrivers/STM32F4xx_HAL_Driver/Inc -IDrivers/STM32F4xx_HAL_Driver/Inc/Legacy -IDrivers/CMSIS/Device/ST/STM32F4xx/Include -IDrivers/CMSIS/Include -IDrivers/CMSIS/Include -Og -Wall
-fdata-sections -ffunction-sections -g -gdwarf-2 -MMD -MP -MF"build/stm32f4xx_hal_flash_ex.d" -Wa,-a,-ad,-alms=build/stm32f4xx_hal_flash_ex.lst Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_flash_ex.c -o build/stm32f4xx_hal_flash_ex.o
arm-none-eabi-gcc -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -DUSE_HAL_DRIVER -DSTM32F407xx -IInc -IDrivers/STM32F4xx_HAL_Driver/Inc -IDrivers/STM32F4xx_HAL_Driver/Inc/Legacy -IDrivers/CMSIS/Device/ST/STM32F4xx/Include -IDrivers/CMSIS/Include -IDrivers/CMSIS/Include -Og -Wall
-fdata-sections -ffunction-sections -g -gdwarf-2 -MMD -MP -MF"build/stm32f4xx_hal_flash_ramfunc.d" -Wa,-a,-ad,-alms=build/stm32f4xx_hal_flash_ramfunc.lst Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_flash_ramfunc.c -o build/stm32f4xx_hal_flash_ramfunc.o
arm-none-eabi-gcc -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -DUSE_HAL_DRIVER -DSTM32F407xx -IInc -IDrivers/STM32F4xx_HAL_Driver/Inc -IDrivers/STM32F4xx_HAL_Driver/Inc/Legacy -IDrivers/CMSIS/Device/ST/STM32F4xx/Include -IDrivers/CMSIS/Include -IDrivers/CMSIS/Include -Og -Wall
-fdata-sections -ffunction-sections -g -gdwarf-2 -MMD -MP -MF"build/stm32f4xx_hal_gpio.d" -Wa,-a,-ad,-alms=build/stm32f4xx_hal_gpio.lst Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_gpio.c -o build/stm32f4xx_hal_gpio.o
arm-none-eabi-gcc -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -DUSE_HAL_DRIVER -DSTM32F407xx -IInc -IDrivers/STM32F4xx_HAL_Driver/Inc -IDrivers/STM32F4xx_HAL_Driver/Inc/Legacy -IDrivers/CMSIS/Device/ST/STM32F4xx/Include -IDrivers/CMSIS/Include -IDrivers/CMSIS/Include -Og -Wall
-fdata-sections -ffunction-sections -g -gdwarf-2 -MMD -MP -MF"build/stm32f4xx_hal_dma_ex.d" -Wa,-a,-ad,-alms=build/stm32f4xx_hal_dma_ex.lst Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_dma_ex.c -o build/stm32f4xx_hal_dma_ex.o
arm-none-eabi-gcc -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -DUSE_HAL_DRIVER -DSTM32F407xx -IInc -IDrivers/STM32F4xx_HAL_Driver/Inc -IDrivers/STM32F4xx_HAL_Driver/Inc/Legacy -IDrivers/CMSIS/Device/ST/STM32F4xx/Include -IDrivers/CMSIS/Include -IDrivers/CMSIS/Include -Og -Wall
-fdata-sections -ffunction-sections -g -gdwarf-2 -MMD -MP -MF"build/stm32f4xx_hal_dma.d" -Wa,-a,-ad,-alms=build/stm32f4xx_hal_dma.lst Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_dma.c -o build/stm32f4xx_hal_dma.o
arm-none-eabi-gcc -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -DUSE_HAL_DRIVER -DSTM32F407xx -IInc -IDrivers/STM32F4xx_HAL_Driver/Inc -IDrivers/STM32F4xx_HAL_Driver/Inc/Legacy -IDrivers/CMSIS/Device/ST/STM32F4xx/Include -IDrivers/CMSIS/Include -IDrivers/CMSIS/Include -Og -Wall
-fdata-sections -ffunction-sections -g -gdwarf-2 -MMD -MP -MF"build/stm32f4xx_hal_pwr.d" -Wa,-a,-ad,-alms=build/stm32f4xx_hal_pwr.lst Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_pwr.c -o build/stm32f4xx_hal_pwr.o
arm-none-eabi-gcc -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -DUSE_HAL_DRIVER -DSTM32F407xx -IInc -IDrivers/STM32F4xx_HAL_Driver/Inc -IDrivers/STM32F4xx_HAL_Driver/Inc/Legacy -IDrivers/CMSIS/Device/ST/STM32F4xx/Include -IDrivers/CMSIS/Include -IDrivers/CMSIS/Include -Og -Wall
-fdata-sections -ffunction-sections -g -gdwarf-2 -MMD -MP -MF"build/stm32f4xx_hal_pwr_ex.d" -Wa,-a,-ad,-alms=build/stm32f4xx_hal_pwr_ex.lst Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_pwr_ex.c -o build/stm32f4xx_hal_pwr_ex.o
arm-none-eabi-gcc -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -DUSE_HAL_DRIVER -DSTM32F407xx -IInc -IDrivers/STM32F4xx_HAL_Driver/Inc -IDrivers/STM32F4xx_HAL_Driver/Inc/Legacy -IDrivers/CMSIS/Device/ST/STM32F4xx/Include -IDrivers/CMSIS/Include -IDrivers/CMSIS/Include -Og -Wall
-fdata-sections -ffunction-sections -g -gdwarf-2 -MMD -MP -MF"build/stm32f4xx_hal_cortex.d" -Wa,-a,-ad,-alms=build/stm32f4xx_hal_cortex.lst Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_cortex.c -o build/stm32f4xx_hal_cortex.o
arm-none-eabi-gcc -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -DUSE_HAL_DRIVER -DSTM32F407xx -IInc -IDrivers/STM32F4xx_HAL_Driver/Inc -IDrivers/STM32F4xx_HAL_Driver/Inc/Legacy -IDrivers/CMSIS/Device/ST/STM32F4xx/Include -IDrivers/CMSIS/Include -IDrivers/CMSIS/Include -Og -Wall
-fdata-sections -ffunction-sections -g -gdwarf-2 -MMD -MP -MF"build/stm32f4xx_hal.d" -Wa,-a,-ad,-alms=build/stm32f4xx_hal.lst Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal.c -o build/stm32f4xx_hal.o
arm-none-eabi-gcc -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -DUSE_HAL_DRIVER -DSTM32F407xx -IInc -IDrivers/STM32F4xx_HAL_Driver/Inc -IDrivers/STM32F4xx_HAL_Driver/Inc/Legacy -IDrivers/CMSIS/Device/ST/STM32F4xx/Include -IDrivers/CMSIS/Include -IDrivers/CMSIS/Include -Og -Wall
-fdata-sections -ffunction-sections -g -gdwarf-2 -MMD -MP -MF"build/stm32f4xx_hal_exti.d" -Wa,-a,-ad,-alms=build/stm32f4xx_hal_exti.lst Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_exti.c -o build/stm32f4xx_hal_exti.o
arm-none-eabi-gcc -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -DUSE_HAL_DRIVER -DSTM32F407xx -IInc -IDrivers/STM32F4xx_HAL_Driver/Inc -IDrivers/STM32F4xx_HAL_Driver/Inc/Legacy -IDrivers/CMSIS/Device/ST/STM32F4xx/Include -IDrivers/CMSIS/Include -IDrivers/CMSIS/Include -Og -Wall
-fdata-sections -ffunction-sections -g -gdwarf-2 -MMD -MP -MF"build/system_stm32f4xx.d" -Wa,-a,-ad,-alms=build/system_stm32f4xx.lst Src/system_stm32f4xx.c -o build/system_stm32f4xx.o
arm-none-eabi-gcc -x assembler-with-cpp -c -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -DUSE_HAL_DRIVER -DSTM32F407xx -IInc -IDrivers/STM32F4xx_HAL_Driver/Inc -IDrivers/STM32F4xx_HAL_Driver/Inc/Legacy -IDrivers/CMSIS/Device/ST/STM32F4xx/Include -IDrivers/CMSIS/Include -IDrivers/CMSIS/Include -Og -Wall -fdata-sections -ffunction-sections -g -gdwarf-2 -MMD -MP -MF"build/startup_stm32f407xx.d" startup_stm32f407xx.s -o build/startup_stm32f407xx.o
arm-none-eabi-gcc build/main.o build/stm32f4xx_it.o build/stm32f4xx_hal_msp.o build/stm32f4xx_hal_tim.o build/stm32f4xx_hal_tim_ex.o build/stm32f4xx_hal_rcc.o build/stm32f4xx_hal_rcc_ex.o build/stm32f4xx_hal_flash.o build/stm32f4xx_hal_flash_ex.o build/stm32f4xx_hal_flash_ramfunc.o build/stm32f4xx_hal_gpio.o build/stm32f4xx_hal_dma_ex.o build/stm32f4xx_hal_dma.o build/stm32f4xx_hal_pwr.o build/stm32f4xx_hal_pwr_ex.o build/stm32f4xx_hal_cortex.o build/stm32f4xx_hal.o build/stm32f4xx_hal_exti.o build/system_stm32f4xx.o build/startup_stm32f407xx.o -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -specs=nano.specs -TSTM32F407ZGTx_FLASH.ld -lc -lm -lnosys -Wl,-Map=build/demo_project.map,--cref -Wl,--gc-sections -o build/demo_project.elf
arm-none-eabi-size build/demo_project.elf
text data bss dec hex filename
4376 20 1572 5968 1750 build/demo_project.elf
arm-none-eabi-objcopy -O ihex build/demo_project.elf build/demo_project.hex
arm-none-eabi-objcopy -O binary -S build/demo_project.elf build/demo_project.bin
此时已经生成目标文件(demo_project.hex),直接下载./download.bat:
$ ./download.bat
D:\Embedded\STM32CubeIDE\workspace_1.0.0\demo_project>"D:\Embedded\STMicroelectronics\STM32 ST-LINK Utility\ST-LINK Utility\ST-LINK_CLI.exe" -c SWD UR -ME -P "./build/demo_project.hex" -V -Rst
STM32 ST-LINK CLI v1.5.1
STM32 ST-LINK Command Line InterfaceConnected via SWD.
Connexion mode : Connect Under Reset.
ST-LINK Firmware version : V2J27S6
Device ID:0x413
Device flash Size : 1024 Kbytes
Device family :STM32F40x/STM32F41xFull chip erase...
Flash memory erased.Flash Programming:
File : ./build/demo_project.hex
Address : 0x08000000
Flash Programming...
圹圹圹圹圹圹圹圹圹圹圹圹圹圹圹圹圹圹圹圹圹圹圹圹北 100%
Verification...
北北北北北北北北北北北北北北北北北北北北北北北北北?100%
Flash memory programmed in 0s and 563ms.
Verification...OK
Programming Complete.MCU Reset.
D:\Embedded\STM32CubeIDE\workspace_1.0.0\demo_project>pause
请按任意键继续. . .
需要调试时,启动调试器./ocd_init.bat
$ ./ocd_init.bat
D:\Embedded\STM32CubeIDE\workspace_1.0.0\demo_project>openocd -f interface/stlink-v2.cfg -f target/stm32f4x.cfg
Open On-Chip Debugger 0.10.0 (2019-10-29) [https://github.com/sysprogs/openocd]
Licensed under GNU GPL v2
libusb1 09e75e98b4d9ea7909e8837b7a3f00dda4589dc3
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
WARNING: interface/stlink-v2.cfg is deprecated, please switch to interface/stlink.cfg
Info : auto-selecting first available session transport "hla_swd". To override use 'transport select'.
Info : The selected transport took over low-level target control. The results might differ compared to plain JTAG/SWD
Info : Listening on port 6666 for tcl connections
Info : Listening on port 4444 for telnet connections
Info : clock speed 2000 kHz
Info : STLINK V2J27S6 (API v2) VID:PID 0483:3748
Info : Target voltage: 3.209980
Info : stm32f4x.cpu: hardware has 6 breakpoints, 4 watchpoints
Info : Listening on port 3333 for gdb connections
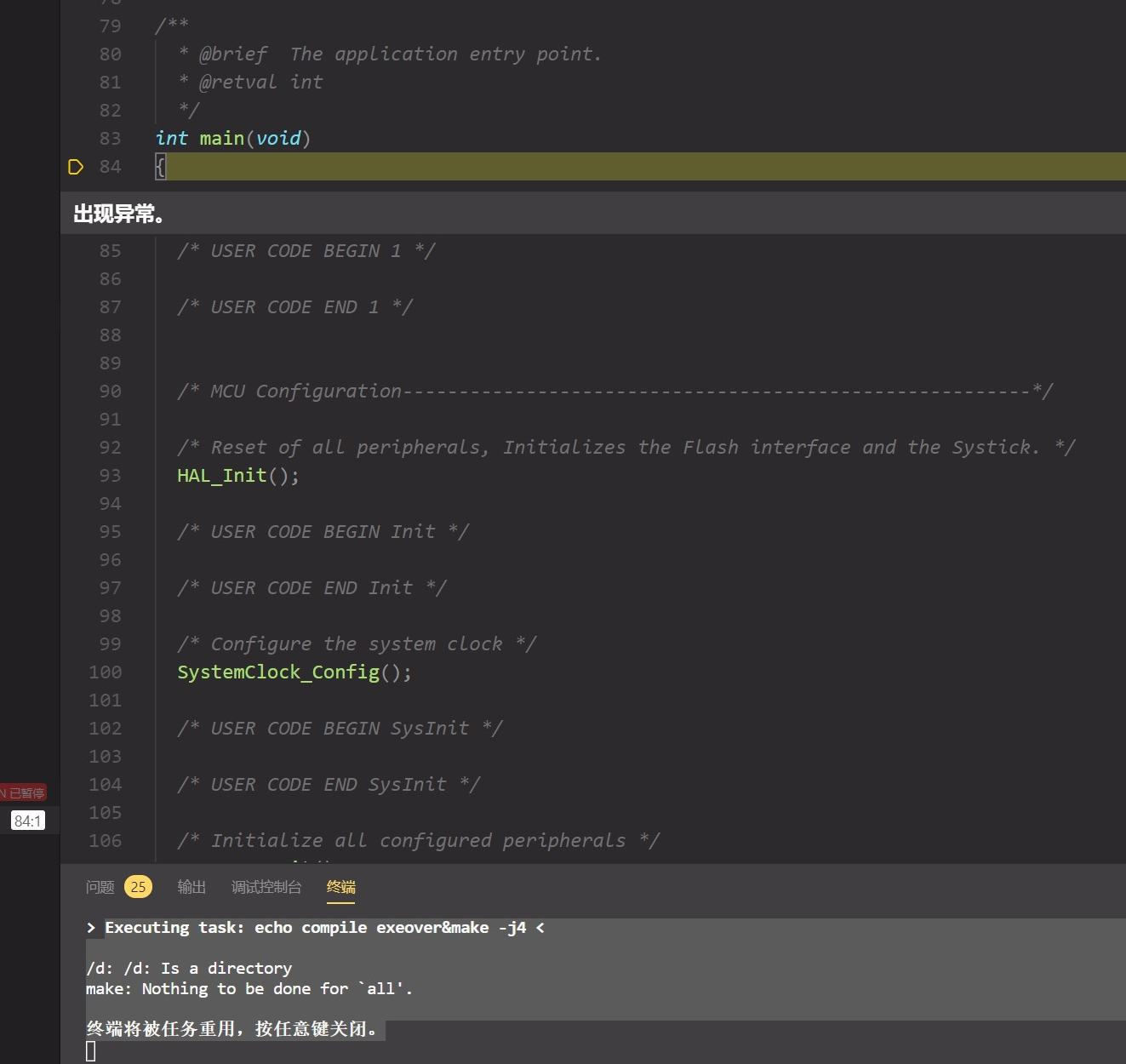
按下F5执行GDB进行调试:
Executing task: echo compile exeover&make -j4 <
/d: /d: Is a directory
make: Nothing to be done for `all'.终端将被任务重用,按任意键关闭。
至此开发环境搭建完毕,由于CubeMX生成的Makefile文件以及工程组织性并不理想,同时VScode的插件配置尚未完善,后续优化插件和Makefile结构

 浙公网安备 33010602011771号
浙公网安备 33010602011771号