
特征点检测
角点检测——FAST
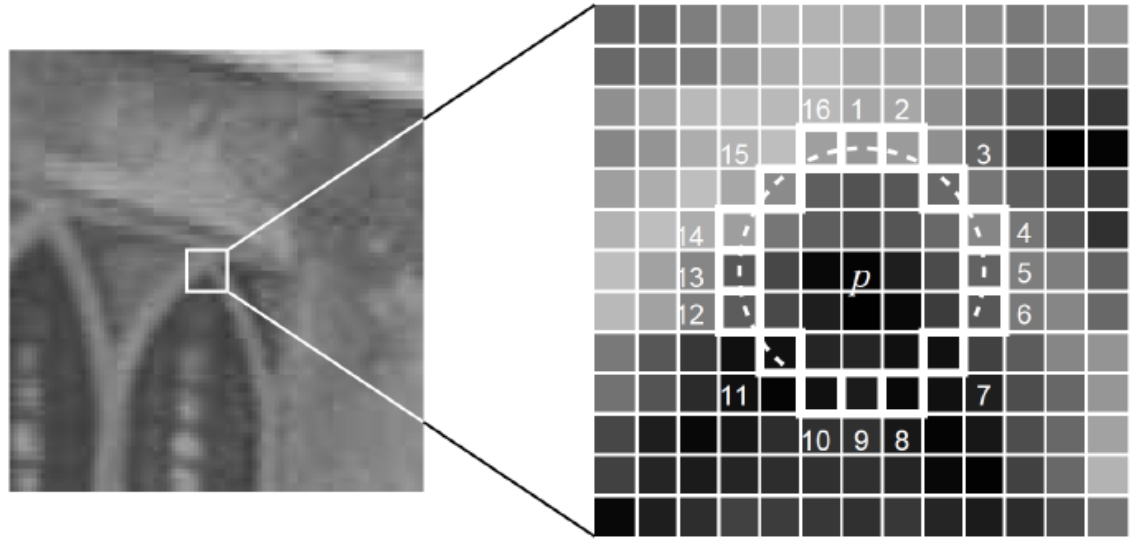
若某像素与周围领域内足够多的像素点相差较大,则该像素可能是角点。
检测步骤
-
-
- 以一个像素p为中心,取半径为3的圆上的16个像素点。
- 计算p1,p5,p9,p13像素与中心像素的差(绝对值),若其中至少有3个超过阈值,则可能是角点,进一步检测;否则直接结束
- 计算p1到p16所有像素点与中心点的像素差,若至少有连续9个超过阈值,则是角点;否则不是角点
- 计算完所有角点,进行非极大值抑制,若某个角点3x3或5x5范围内,自己是最大的,则自身保留,否则放弃该角点。
-
python实现
def FASTGetRadius(y,x):
P = []
for indexX in range(x-1,x+2):
P.append([y - 3,indexX])
P.append([y + 3, indexX])
for indexY in range(y-1,y+2):
P.append([indexY,x-3])
P.append([indexY, x+3])
P.append([y - 2,x - 2])
P.append([y - 2, x + 2])
P.append([y + 2, x - 2])
P.append([y + 2, x + 2])
return P
def FASTGetScore(y,x,P,img):
score = 0
for point in range(0,len(P)):
score+= np.abs(img[P[point][0],P[point][1]]-img[y,x])
return score
def FAST(img,T):
img = np.float32(img) #原本是短整型只能存储0-255,当出现负值时会溢出,因此不能用于差值运算
height,width = img.shape[0],img.shape[1]
corner = []
for y in range(3,height-3):
for x in range(3,width-3):
count=0
if np.abs(img[y-3,x]-img[y,x]) >= T:
count+=1
if np.abs(img[y,x-3]-img[y,x]) >= T:
count+=1
if np.abs(img[y+3,x]-img[y,x]) >= T:
count+=1
if np.abs(img[y,x+3]-img[y,x]) >= T:
count+=1
if count<3:
continue
P = FASTGetRadius(y,x)
count=0
for point in range(0,len(P)):
if np.abs(img[P[point][0],P[point][1]]-img[y,x]) >= T:
count+=1
if count>=9:
break
if count<9:
continue
corner.append([y,x,P])
#非极大值抑制
panel = np.zeros((img.shape),dtype=np.float32) #创建全0模板
for item in corner:#在模板上计算每个点的score
panel[item[0],item[1]] = FASTGetScore(item[0],item[1],item[2],img)
window=3
for item in corner:#在模板上对每个特征点进行非极大值抑制。
isContinue=True
for y in range(item[0]-window//2,item[0]+window//2+1):
for x in range(item[1] - window // 2, item[1] + window // 2 + 1):
if (panel[y,x]>panel[item[0], item[1]]):
panel[item[0], item[1]]=0
isContinue=False
break
if isContinue==False:
break
for y in range(0,height):
for x in range(0,width):
if panel[y,x]>0:
P = FASTGetRadius(y, x)
for point in P:
img[point[0], point[1]] = 0
plt.imshow(img,cmap="gray")
plt.show()优点
速度快
缺点
特征点不具有方向
不满足尺度不变性
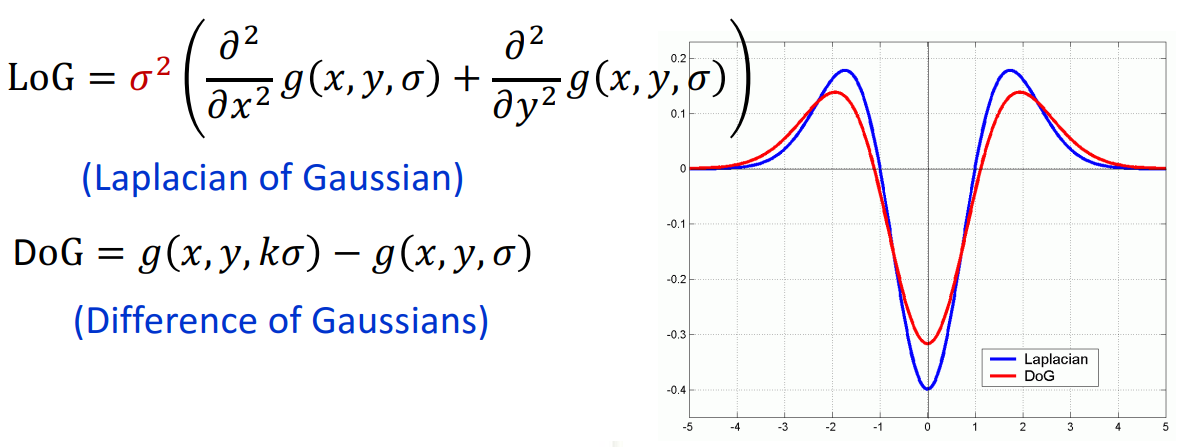
斑点检测——LoG(Laplace of Gaussian)
基本思想
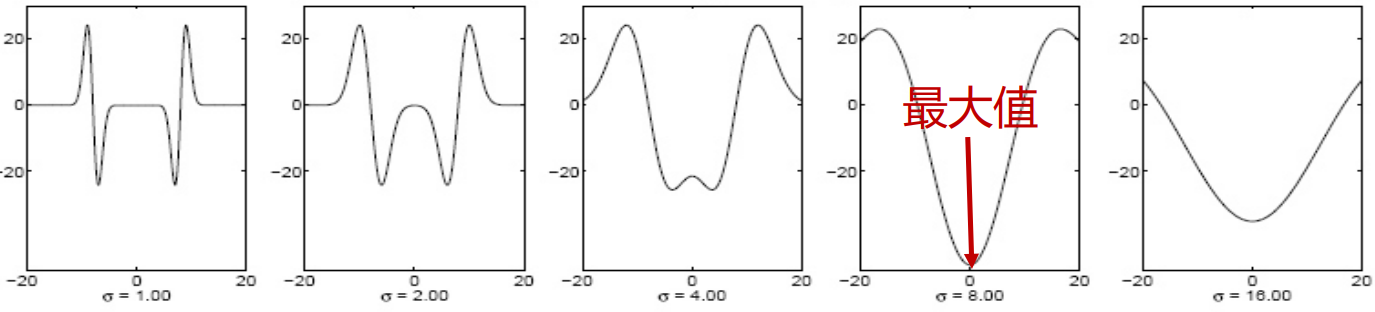
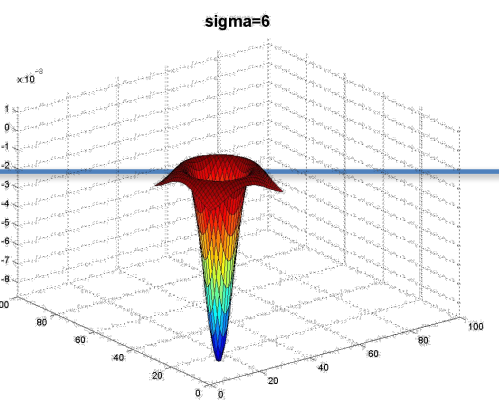
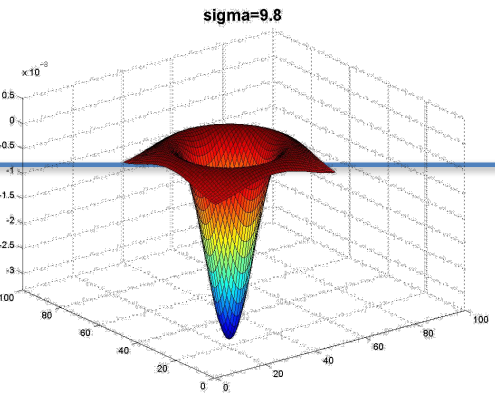
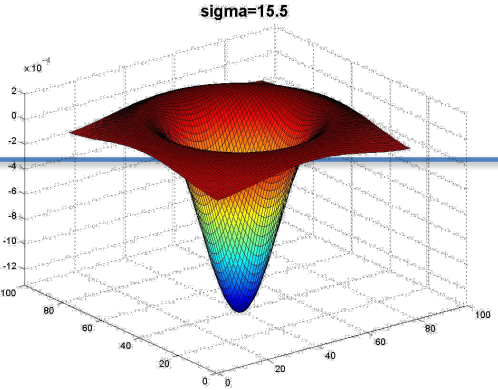
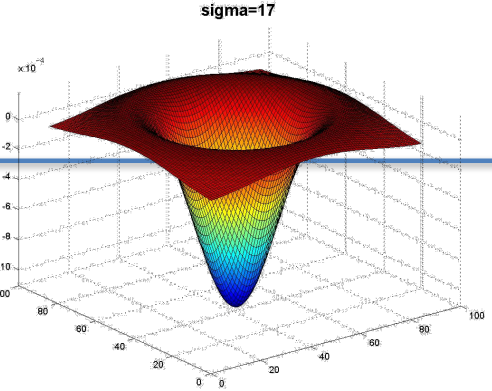
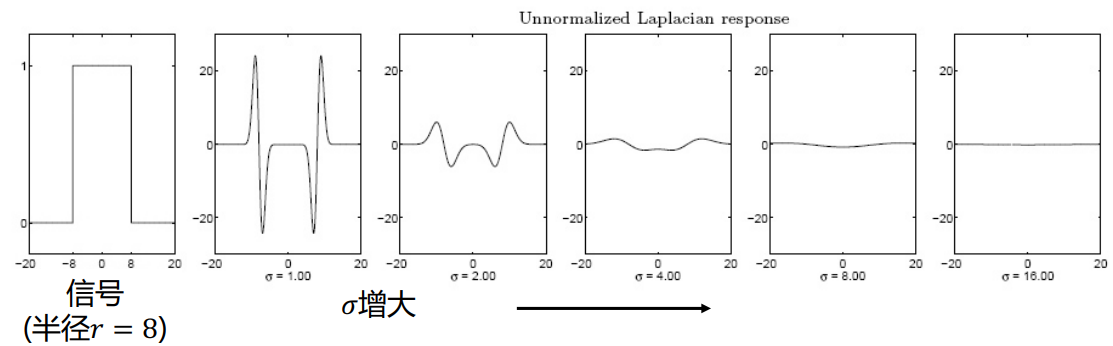
LoG对指定宽度斑点进行卷积时,参数中,取不同的σ响应幅值会不同,取响应幅值最大时候的σ用于检测该宽度的斑点。如下图(已经做了尺度归一化)。
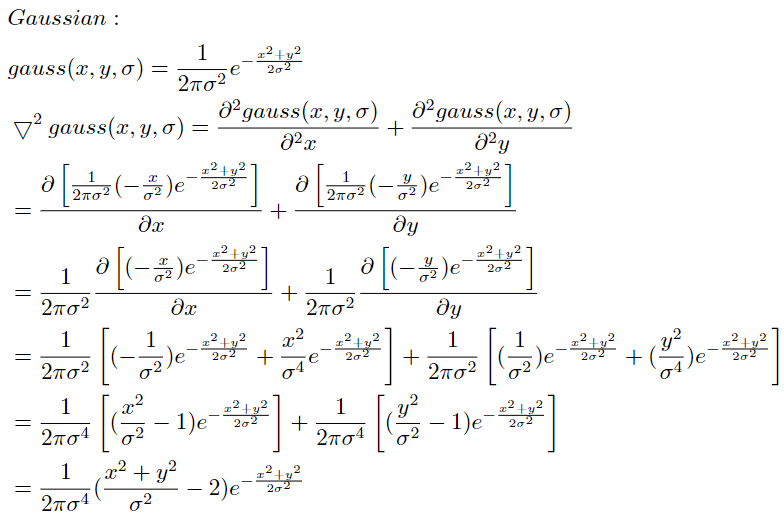
一维形式如下:
二维形式如下:
σ取不同的值,在一副图片中检测到的斑点尺寸也不同

响应幅值最大的尺度也叫做“本征尺度”。
LoG就是高斯函数的拉普拉斯算子,对高斯函数求二阶微分算子。
拉普拉斯算子

高斯拉普拉斯
斑点
边缘点是像素的阶跃,而斑点是两个阶跃之间的区域。
以二值图像为例

尺度归一化
尺度归一化的原因
不同尺寸的斑点,用相同LoG卷积结果
如下图所示,当LoG函数的σ=1时,遇到-1到1宽度的阶跃区间时,响应幅值最大,说明σ=1时适合检测半径为1大小的斑点。

相同尺寸的斑点,用不同LoG卷积结果
对于想要检测的斑点,可以调整σ来寻找响应最大的尺度。
根据LoG的公式:
![]()
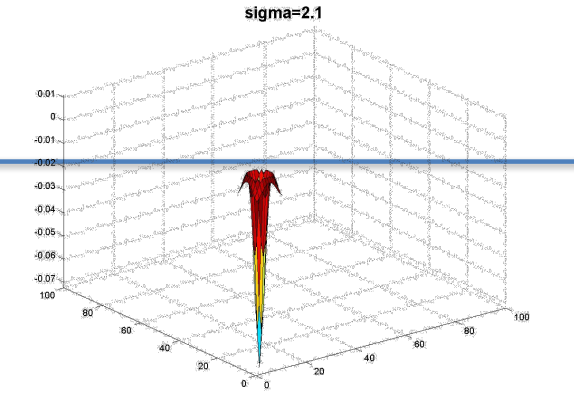
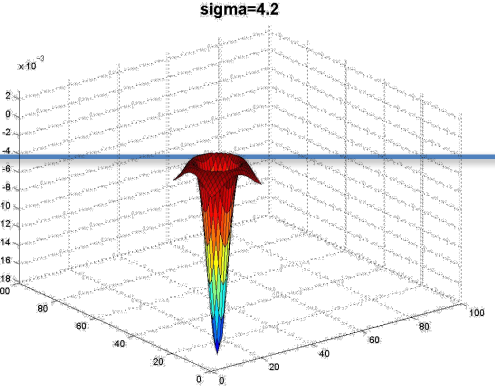
可知当σ越大,LoG越小,因此要检测大的斑点,不做尺度归一化,会导致响应幅值特别小以致于难以检测。
如下图所示,LoG的尺度σ越大,LoG算子的最大幅度逐渐减小,导致响应最终难以检测,因此需要做尺度归一化。
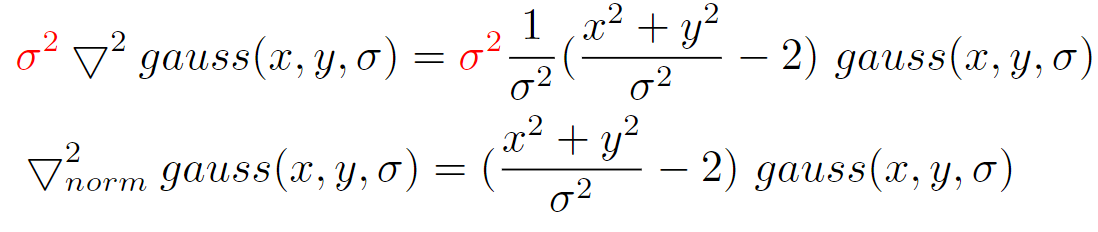
尺度归一化的LoG
对LoG算子变形,得到如下形式

两边同时乘以σ2,得到尺度归一化的LoG:
已知要检测斑点的半径,确定尺度σ
要使得响应幅值最大,则要将LoG的过零点和圆的直径对齐
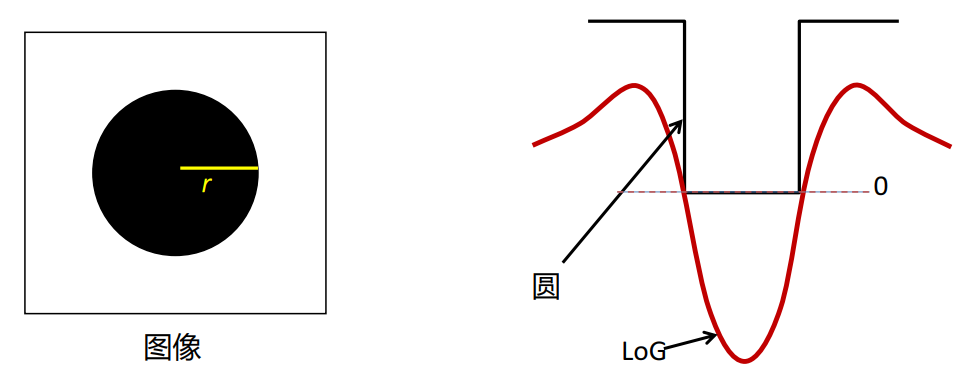
标准圆的方程:
![]()
代入尺度归一化的LoG,并求LoG在过零点位置的σ
![]()
得到:

斑点检测——DoG(Difference of Gaussian)
基本思想
DoG是LoG的近似,用于加速计算。高斯差分采用两个不同的σ之差进行运算。
LoG和DoG的关系
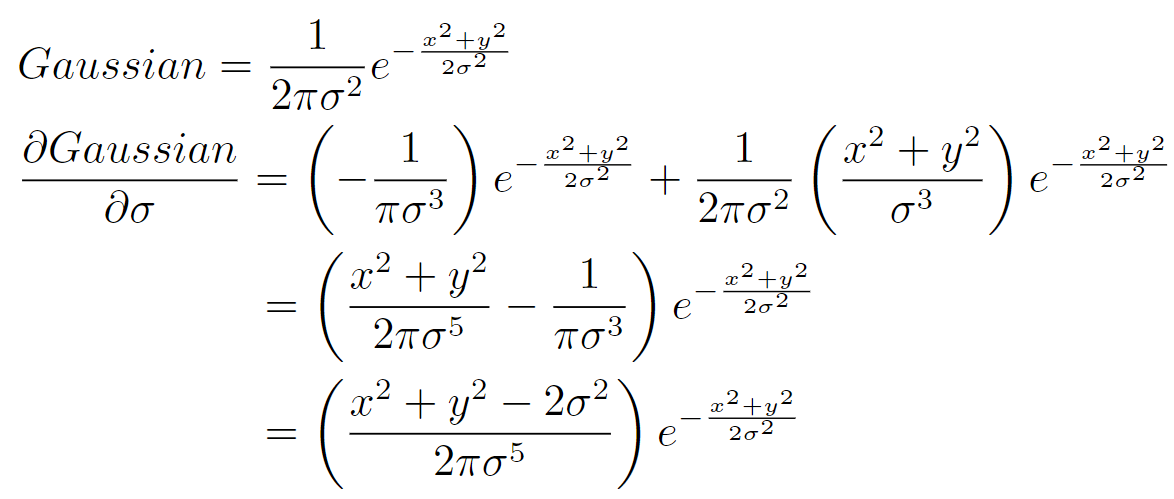
高斯函数在σ上的变化率为:
高斯差分描述的是高斯函数取两个不同尺度的σ之差,不是变化率。
高斯拉普拉斯算子的变形为:
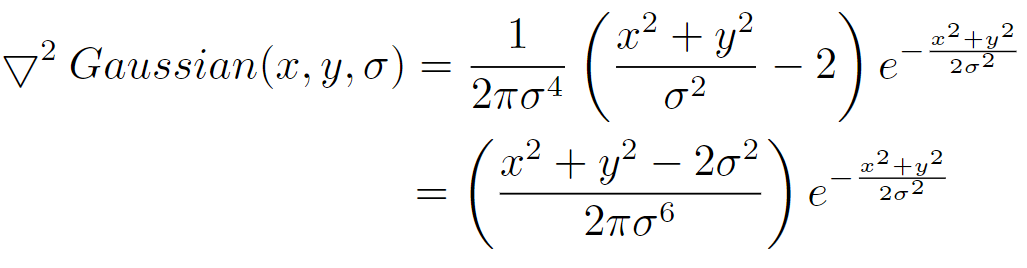
其与高斯函数对σ的导数的关系为:

而根据导数定义,高斯函数对σ的导数可以近似为:
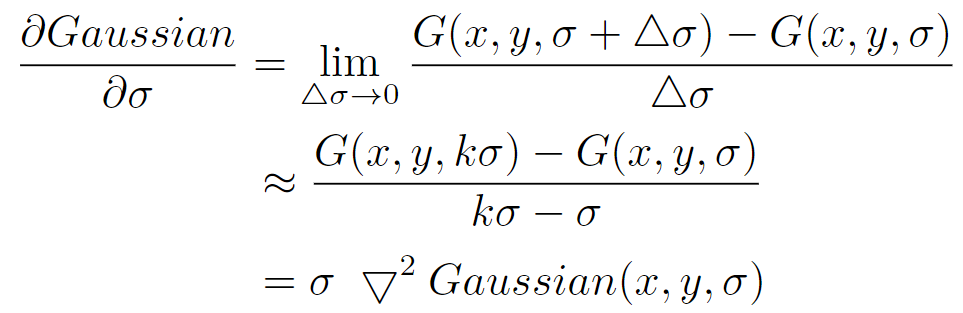
将最后等式变形,得到高斯差分DoG和LoG的关系:
![]()
即:
![]()
其中k-1是常量,通常取根号2
DoG检测斑点步骤
构造高斯金字塔
构造高斯差分金字塔
极值点定位
SIFT算法
构造高斯金字塔
对图像进行高斯平滑处理,然后下采样,反复多次,形成高斯金字塔。
高斯金字塔结构为先分成多个八度,每个八度内再分多个层。
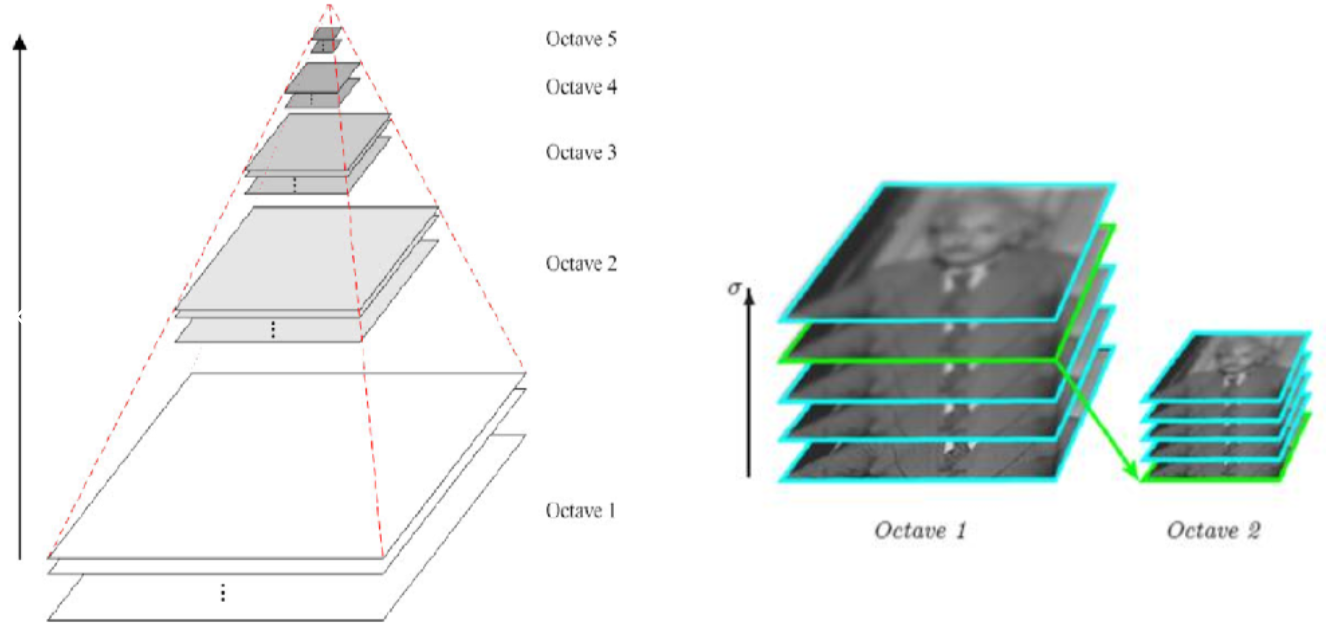
假设图像大小为512 x 512,则可以分为log2512 = 9 -3 = 6组,每组3层。
第0层先把图像扩大2倍。
每组内,的尺度分别为2oσ,2okσ,2ok2σ,...2oknσ。其中o是第o个八度。
第0层内,I*G(x,y,σ),I*G(x,y,kσ),I*G(x,y,k2σ)
第1层内,I*G(x,y,2σ),I*G(x,y,2kσ),I*G(x,y,2k2σ)
第2层内,I*G(x,y,4σ),I*G(x,y,4kσ),I*G(x,y,4k2σ)
...
第6层内,I*G(x,y,64σ),I*G(x,y,64kσ),I*G(x,y,64k2σ)
同组内,图像尺度关系
![]()
相邻组之间,对应层之间的尺度关系
![]()
构造高斯差分金字塔提取特征
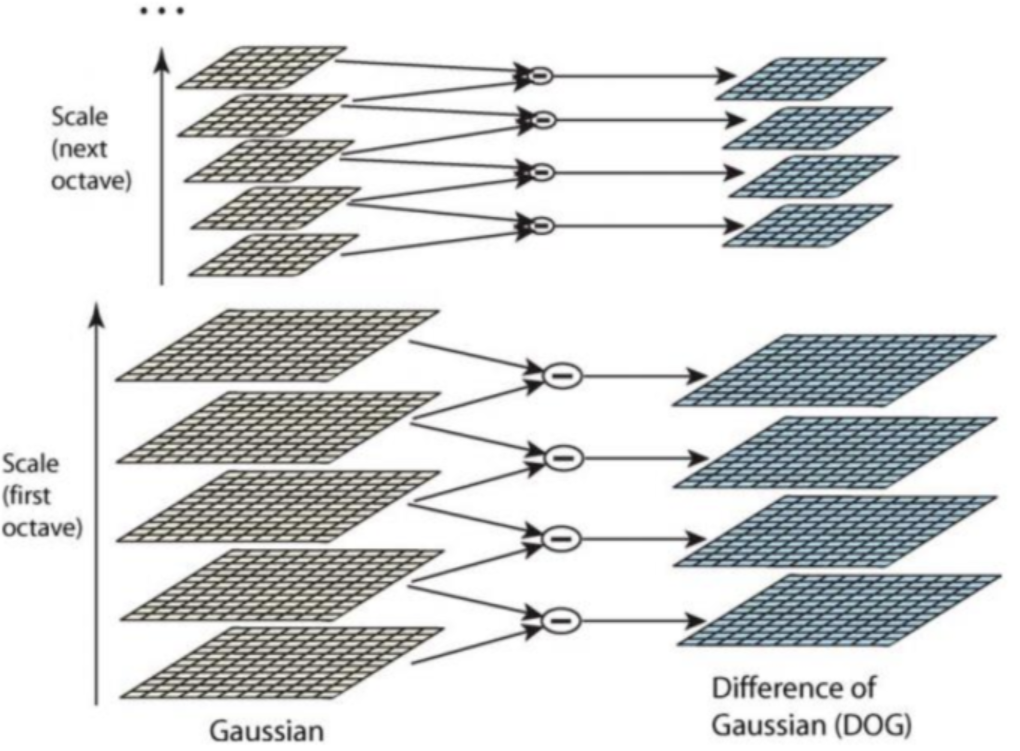
每个八度内,相邻层两两相减,即完成了高斯差分操作,提取到了特征点。回想DoG出现的目的就是使用不同尺度的高斯函数进行相减,得到近似LoG的效果。
局部极值点检测
每一个点要分别与以自身为中心的9宫格,和上下两个尺度的9宫格所有特征点进行比较,一共要比较26个点。
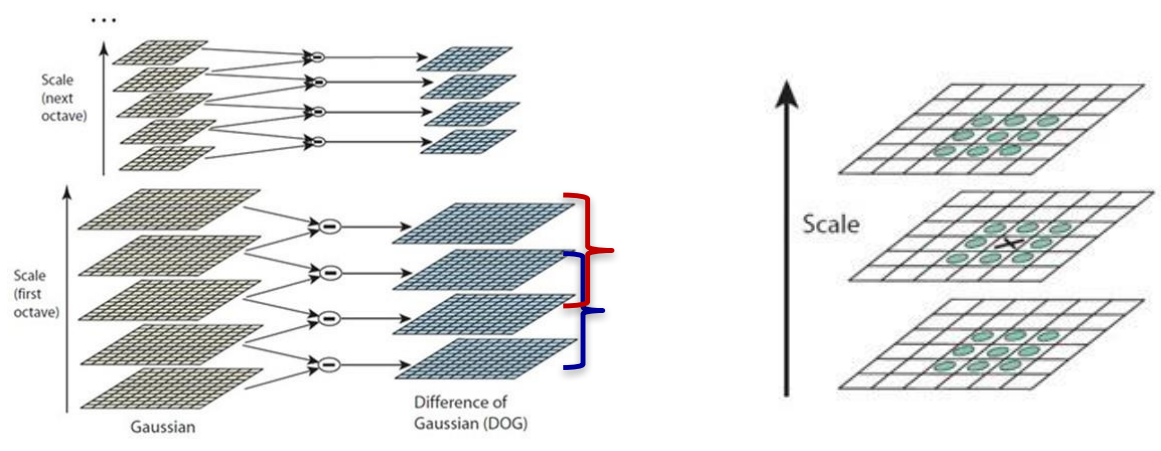
假设每个八度之间有4层高斯差分金字塔,那么只能在中间两层进行差分。
这样产生的极值点并不全都是稳定的特征点,因为某些极值点响应较弱,而且DoG算子会产生较强的边缘响应。
关键点精确定位
原因
使用DoG检测到的极值是离散的极值,且在高斯金字塔进行下采样时,像素逐渐向粗粒度转变,所检测到的极值也是粗粒度的极值。
问题描述
给定已知的粗粒度离散的极值点,需要估算出细粒度的极值点。
解决方案
可以使用泰勒公式逼近原函数,任意给定一个H,泰勒公式都可以在该点处进行多项式展开,近似原函数。
得到该近似函数,求导得到该函数的极值点。
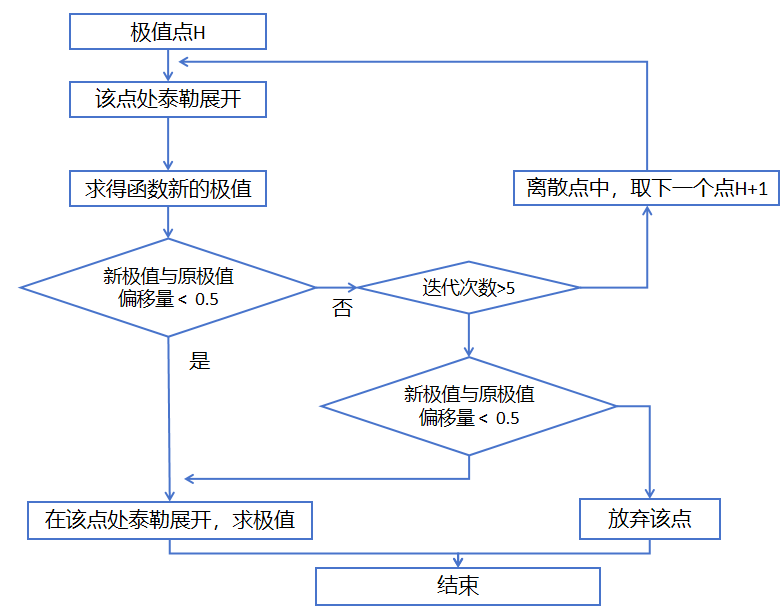
若求得极值点与原极值点偏移量大于0.5,则在下一个离散的点进行泰勒展开,直到收敛。
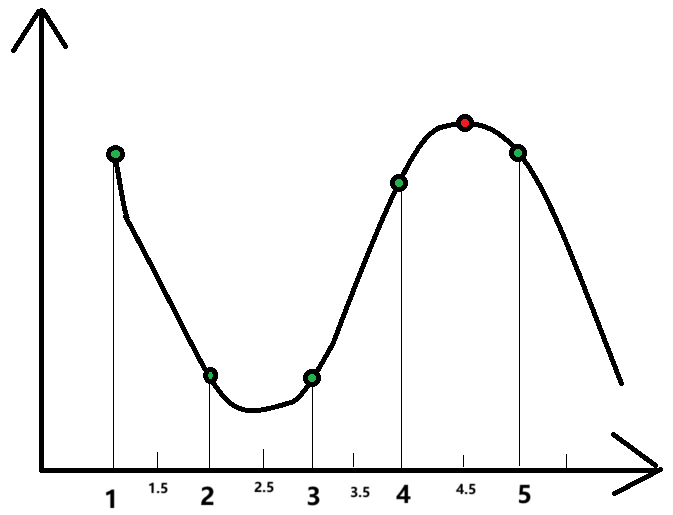
为什么是0.5?
如下图所示,红色为真实的极值点,绿色为离散的极值点。所有的离散值中,x(1)最大,但是真实极值里x(5)最近。
首先在X(1)处展开,求得极值与x(1)的偏移量ΔX>0.5,则跳到x(2)处展开,到了x(4)处展开,偏移量ΔX仍然大于0.5,也就是过了4.5这个点,这就与X(5)更近。
在X(5)处展开,真实极值位置在4.5到5之间,偏移量肯定小于0.5。求该点极值即可。
迭代逼近,求里极值最近的离散点
DoG在检测到的粗粒度极值点H处的二阶泰勒展开式为:

对其求导,并令其等于0:
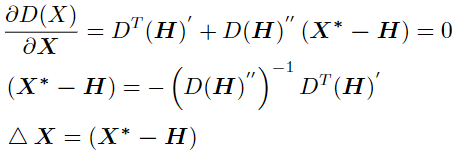
其中X*是极值点,H是原极值点,两者之差为粗粒度极值点与真实极值点的偏差,记ΔX。
所以当ΔX>0.5时,就在H+1位置进行泰勒展开,求极值,直到收敛。
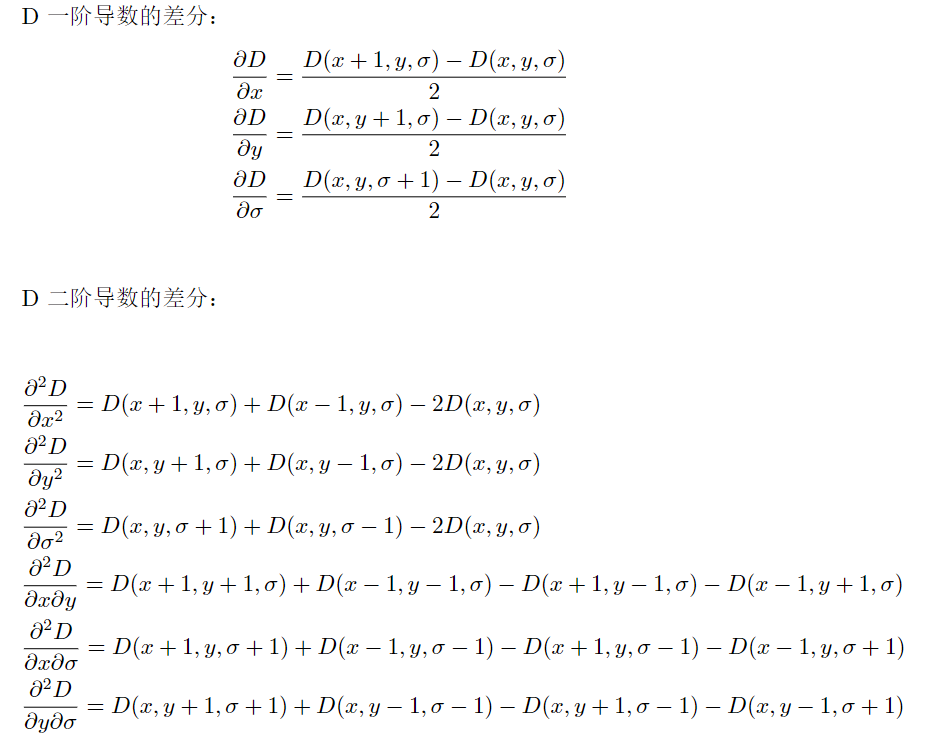
离散点中,某一点一阶导数D(H)'和二阶导数D(H)''可以用差分法,根据前后两个点来获得。
迭代结束,求极值
至此,偏移量已经收敛到了0.5以下,可以将最近的极值点HNearest代入泰勒公式求得极值。

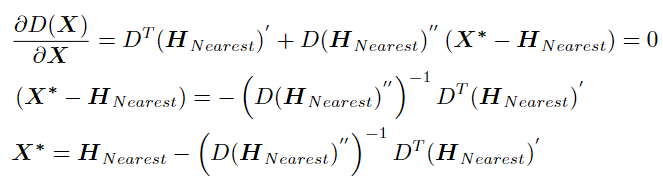
将极值点X*代回即可求得极值:
注意:D(HNearest)'和D(HNearest)''是对D求一阶导数和二阶导数之后代入HNearest所得到的值,是一个值,所以满足乘法运算各种规律。
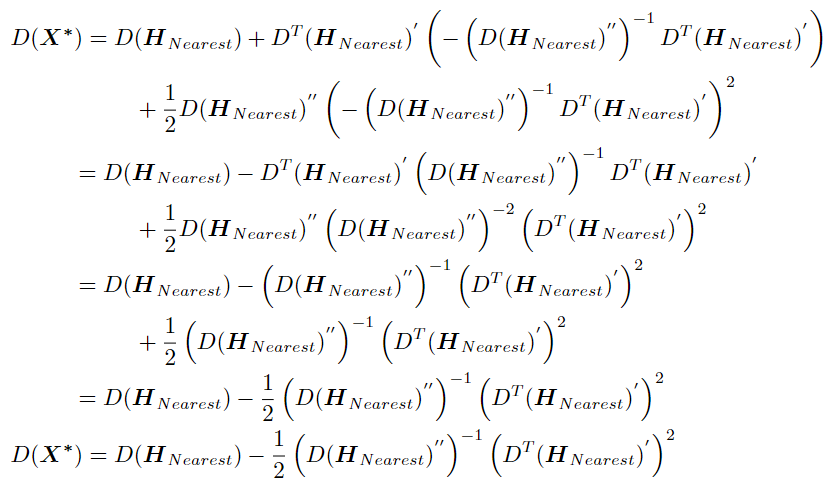

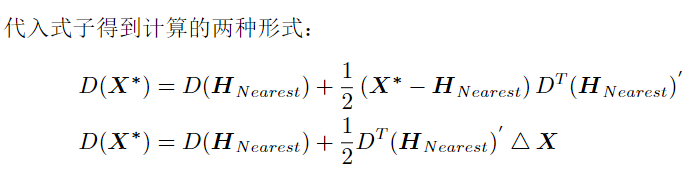
两种形式中,计算时取任意形式都可。
算法的流程图
低对比度去除
将|D(X)|小于阈值的点删除
边缘效应去除
在边缘的梯度上,沿着边缘的方向梯度变化率小,也就是曲率小,而垂直边缘方向梯度变化大,也就是曲率大。
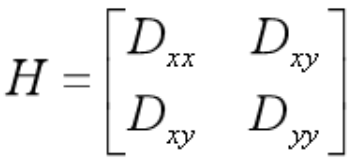
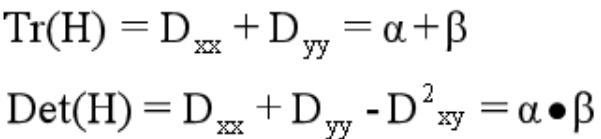
Dxx,Dyy,Dxy都可以通过离散点的差分法获得。
在原论文中,T取1.2,小于T时保留关键点,否则删除。
关键点方向匹配
每个点梯度幅值和梯度方向
首先计算特征点邻域内每个点的梯度幅值和梯度方向,邻域半径取3 * 1.5 * σ

L(x,y)为高斯图像中的(x,y)位置像素点。
生成特征点描述子
至此已经获得了每个关键点邻域内所有点的位置,尺度和方向信息。
现在计算邻域内像素的梯度幅值和方向。
计算邻域内主方向和辅方向
计算梯度直方图,梯度直方图是将360°方向平均分成36个方向,每10°为一个bin,直方图中最大值的索引为主方向。一个bin内像素幅值的累加和就是bin的高度。
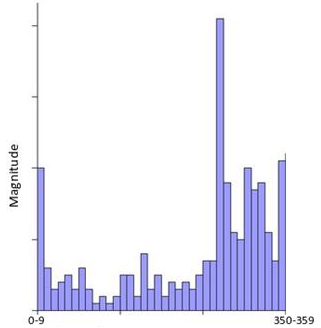
每个特征点分配一个主方向和多个辅方向,当一个bin的高度大于主方向bin的80%,则作为辅方向,为了增强鲁棒性。
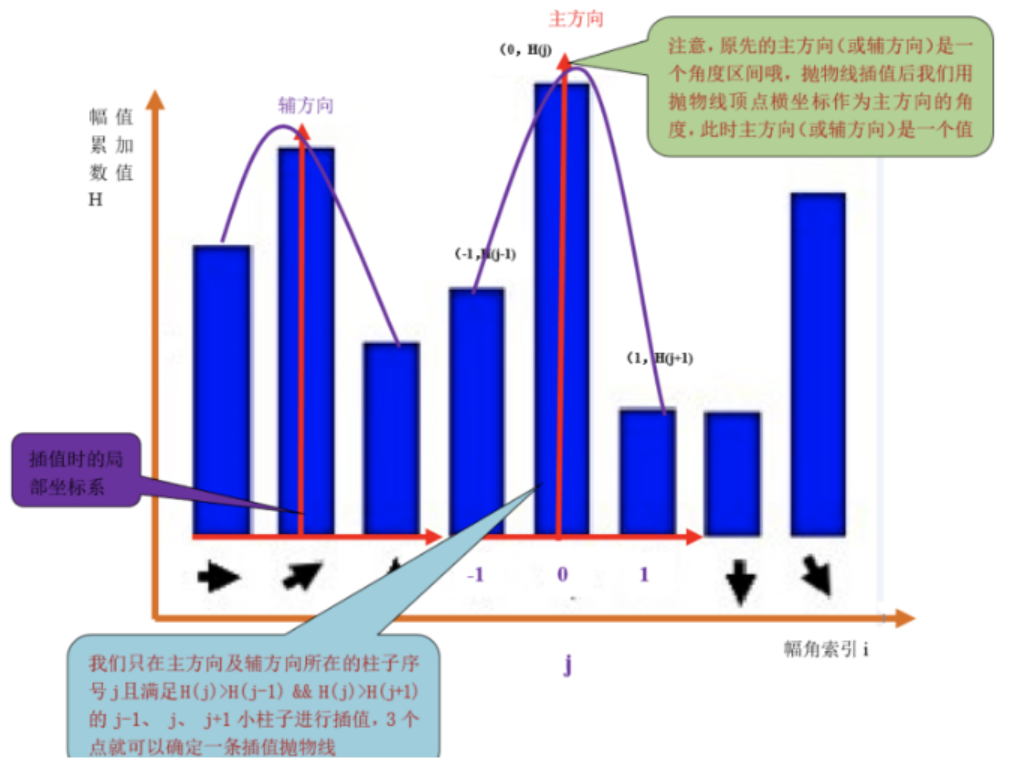
主方向细化
直方图上每个bin的角度有10°,因此要在10°内进一步细化。
采用抛物线拟合
已知拉格朗日插值法公式如下(详情请看另一篇文章《插值法》):

现在使用抛物线插值,也就是二次插值,n=2。

使用离散的三个点可以确定曲线L(x),再对x进行求导,求得极值:

![]()
![]()
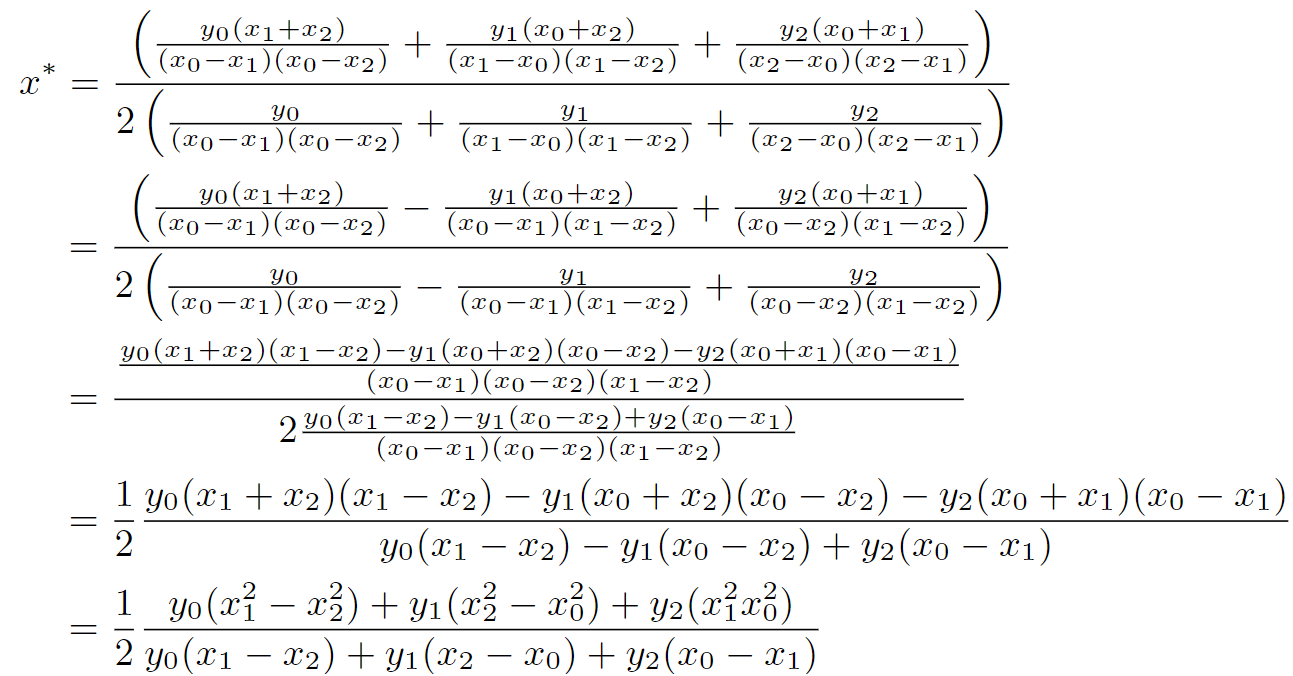
因此,可以根据三个离散值点,使用拉格朗日插值法拟合曲线后,求得曲线的局部极值:

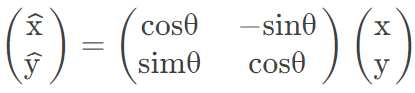
在附近邻域内将坐标轴旋转θ角度,也就是将领域内坐标轴旋转为特征点的主方向。坐标变换矩阵为:
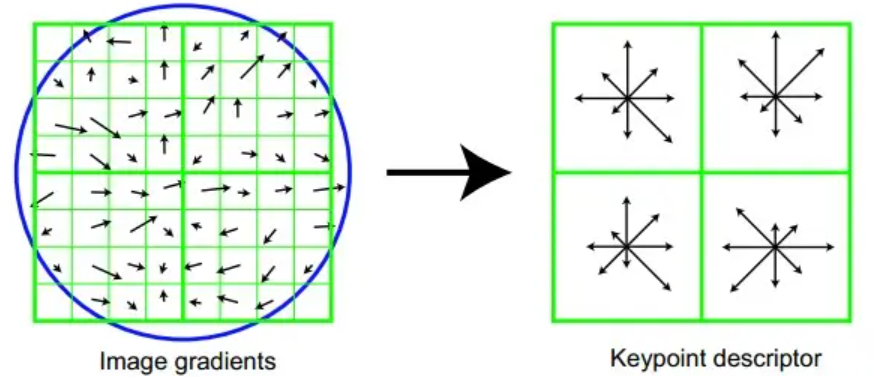
旋转后,以主方向为中心,取8x8的窗口。8 x 8个窗口可以分成4份,每一份为4 x 4格子。
在每个4x4的格子内计算计算8个方向的梯度直方图,计算每个梯度方向的累加值,形成一个种子点。
每个关键点包含4个种子点,每个种子点包含8个方向的向量信息。
本文来自博客园,作者:Laplace蒜子,转载请注明原文链接:https://www.cnblogs.com/RedNoseBo/p/17713113.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号