

数字图像处理基础
成像模型
基本图像模型
使用二维函数f(x,y)表示图像。其值与物理源辐射的能量成正比,因此是非负有限的。
0 ≤ f(x,y) < ∞
f(x,y)= i(x,y) r(x,y)
i(x,y):入射分量,0 ≤ i(x,y) < ∞,光线照射在观察场景的照射量,取决于照射源。
r(x,y):反射分量,0 ≤ r(x,y) ≤ 1,场景中物体反射的照射量,限制在0(全吸收)和1(全反射)之间,取决于被成像物体的特性。
扩展到单色图像
l=f(x,y)
Lmin ≤ l ≤ Lmax。
Lmin =iminrmin。
Lmax =imaxrmax。
区间[Lmin,Lmax]称为灰度级。实际工作中区间表示为[0,1]或[0,C],l=0表示黑色,l=1(或C)表示白色。
分辨率
空间分辨率是图像中最小可辨别细节的测度,通常使用 点数/英寸(dpi)表示。
灰度分别率是在灰度级中可分辨的最小变化
图像内插
将一张小图像放大时,通常会使用内插。如将500 x 500的图片放大到1000 x 1000。
最邻近内插法
图片本身包含了像素,但是不足以填充展示区域。空白的屏幕点采用周围像素点最邻近的一个像素来填充。
优点
简单。
缺点
失真严重。
双线性内插
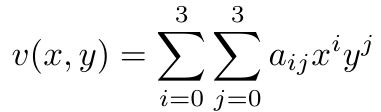
v(x,y)=ax + by + cxy +d
假设v(x,y)为空白像素点。使用4个最近邻的灰度来计算空白位置的灰度。
四个系数有(x,y)的四个最近邻点给出的四个未知方程求出。
优点
比最近邻内插法更优
缺点
计算量增大。
双三次内插
16个系数可用点(x,y)的16个最近邻的点写出的16个未知方程求出。
Adobe PhotoShop 和 Corel Photopaint中常用。
像素间基本关系的表示
邻域表示
4邻域:上下左右,N4(p)表示p的4邻域。
8邻域:上下左右,左上,右上,左下,右下,N8(p)表示p的8邻域。
ND(p):表示处于p的对角上。
邻接表示
V是用于定义邻接的灰度值集合。
4邻接:q在集合N4(p)中,q是p是4邻接的。
8邻接:q在集合N8(p)中,q是p是8邻接的。
m邻接:q在p的N4(p)中,或,q在p的ND中,且p的N4相交q的N4为空。
判断方法
4邻接一定是m邻接,但8邻接不一定是m邻接,若p和q属于8邻接,但p和q周围存在一个r,使得p和q都是r的4邻接,那么不是m邻接。
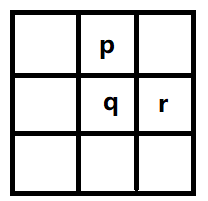
图1,p和r属于8邻接,但是不属于m邻接,因为周围存在一个q,使得p和r是q的4邻接
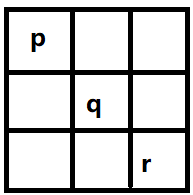
图2,p和q属于8邻接,也属于m邻接,周围不存在像素点使得p和q是其4邻接,q和r同理。
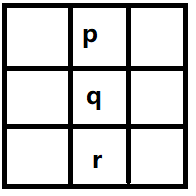
图3,p和q和r是4邻接,也属于m邻接。
通路
假设存在像素序列:p(x0,y0),r(x1,y1),...,q(xn,yn),序列中像素是两两邻接的。
此时p到q之间存在通路。如果起始点像素p(x0,y0)与终止点像素q(xn,yn)相同,称为闭合通路。
对于像素集合S中的任意像素p,在S中连接到p的像素集称为S的连通分量,连通分量只有一个,集合S称为连通集。
区域
令R表示图像中的一个子集,若R是一个连通集,则R为图像的一个区域。两个区域联合形成一个连通集时,两个区域互为邻接区域。
边界
区域R的边界是R中与R的补集中像素相邻的一些像素。就是与自身补集的边界。
相关运算
线性运算
假设存在算子H,对输入图像f(x,y)产生输出图像g(x,y):
![]()
若给定任意两个常数a和b,以及任意两幅图像f1(x,y)和f2(x,y),若:
![]()
则称H是线性算子
最大值算子的线性证明
![]()

结果不满足线性运算的等式,所以最大值算子不是线性运算。
算术运算的应用
使用图像相加(平均)降低噪声
使用图像相减比较图像
使用图像相乘\相除矫正阴影和模板。
空间运算
单像素运算
s=T(z)
z是原图像中的像素灰度,s是处理后图像中对应像素。
邻域运算
Sxy为图像f中任意一点(x,y)为中心的一个邻域的坐标集合。r和c是像素的行坐标和列坐标,坐标属于集合Sxy。
几何变换
(x,y)是原图像中的像素坐标,(x',y')是变换后图像中像素的坐标。例如(x',y')=(x/2,y/2)在空间方向上将原图像缩小一半。
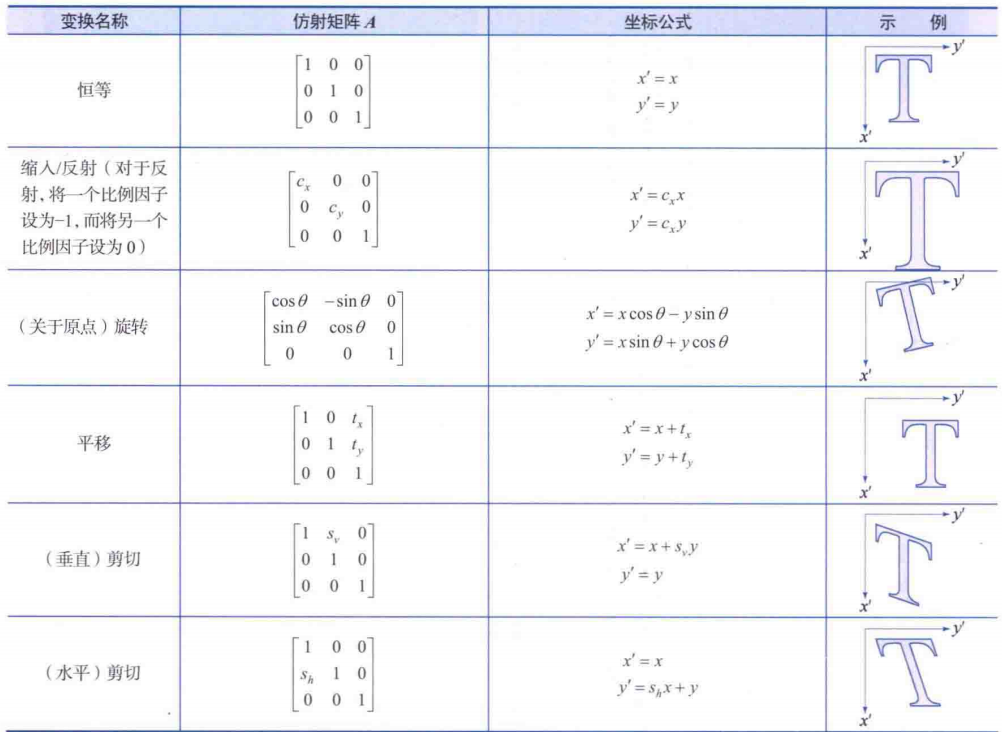
仿射变换
包括缩放变换,平移变换,旋转变换,剪切变换等等,仿射变换用齐次坐标来表示:
仿射变换矩阵:
图像配准
任务定义
给定输入图像和参考图像,目标是对输入图像做集合变换,使输出图像与参考图像对齐(配准)。
解决方法
采用约束点(控制点)。约束点是其精确位置在输入图像和参照图像中已知的对应点。
例如在输入图像和参考图像中都有4个约束点,基于双线性近似的一个简单模型,有如下式子:
x=c1v+c2w+c3vw+c4
y=c5v+c6w+c7vw+c8
(v,w)和(x,y)分别是输入图像和参照图像中约束点的坐标。
估计阶段
如果2幅图像中有4对对应的约束点,那么就有8个方程,8个未知数c1,...,c8。
配准阶段
用算出的参数和式子,以待配准图像(v,w)为输入像素,计算输出(x,y)像素。
但是配准不一定完美,导致这原因之一就是手工选择约束点时存在的误差。
向量相关运算
RGB图像
每一个像素z都有三个分量:

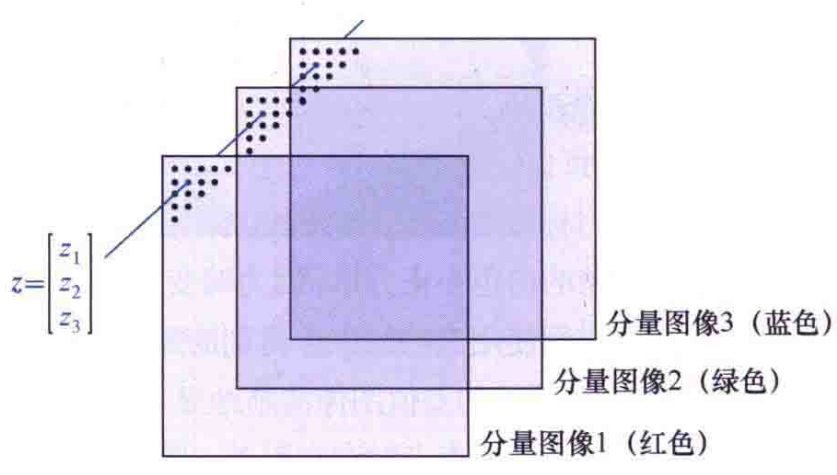
z1,z2,z3分别为红绿蓝三色的灰度。
运算
内积运算
对应分量相乘再相加
a·b=a1b1+a2b2+...+anbn
欧几里得向量范数
内积平方根视为向量z的长度
![]()
欧几里得距离
点(向量)z和a之间的欧几里得距离D(z,a)
两向量之差的欧几里得向量范数

图像变换
图像的线性处理
g=Hf+n
f是输入图像MN x 1向量,n是M x N噪声的MN x 1向量,g是处理后得图像的MN x 1向量。H表示对输入图像进行线性处理的MN x MN矩阵
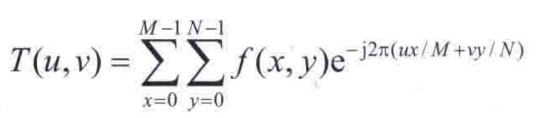
变换核
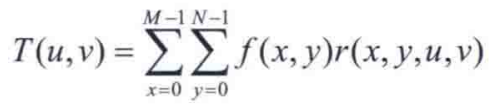

f(x,y)是输入图像,r(x,y,u,v)是正变换核,u,v为变换变量,T(u,v)称为f(x,y)的正变换,s(x,y,u,v)是反变换核。
变换核的性质
可分离性:r(x,y,u,v)=r1(x,u) r2(y,v)
对称性:r(x,y,u,v)=r1(x,u) r1(y,v)
傅里叶变换核
![]()

离散傅里叶变换对

图像灰度和随机变量
令zi,i=0,1,2,...,L-1表示一幅M x N数字图像中所有可能的灰度值
灰度概率
灰度级zk在图像中出现的概率为:
![]()
nk是灰度级zk在图像中出现的次数,MN是像素总数
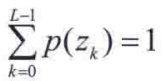
很明显,所有灰度级出现的概率总和为1:
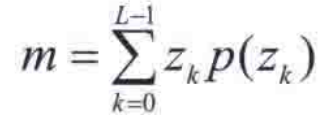
均值灰度
均值灰度(灰度的平均值),每个像素乘以其出现概率
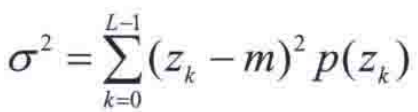
灰度方差(灰度偏离平均值的程度)
本文来自博客园,作者:Laplace蒜子,转载请注明原文链接:https://www.cnblogs.com/RedNoseBo/p/17145142.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号