01 绪论 | 常微分方程
 常微分方程基本概念
常微分方程基本概念
1. 微分方程的定义
- 微分方程:联系自变量,未知函数以及 未知函数的导数的关系式称为 微分方程
- 常微分方程:在一个微分方程中,自变量只有一个
- 偏微分方程:在一个微分方程中,自变量有两个或以上
- 阶数:微分方程中出现的未知函数的 最高阶导数或微分的阶数 称为微分方程的 阶数
- 线性微分方程:如果上述方程的左端为
- 非线性微分方程:不是线性微分方程的微分方程
- 线性微分方程:如果上述方程的左端为
2. 微分方程的解和通解
- 微分方程的解:如果函数
- 对
则称
- 显式解:
- 隐式解:如果关系式
- 通解:如果微分方程的解中含有任意常数,且所含的 相互独立 的任意常数的个数与微分方程的阶数 相同,则称这样的解为该方程的 通解
- 相互独立:存在
- 独立常数个数与方程阶数 相同
- 不是所有微分方程都有通解
- 微分方程的通解不包含方程的所有解
- 微分方程在不同区域内的通解形式可能不同
3. 微分方程的积分曲线和向量场
-
积分曲线:一阶微分方程
-
积分曲线族:其通解
-
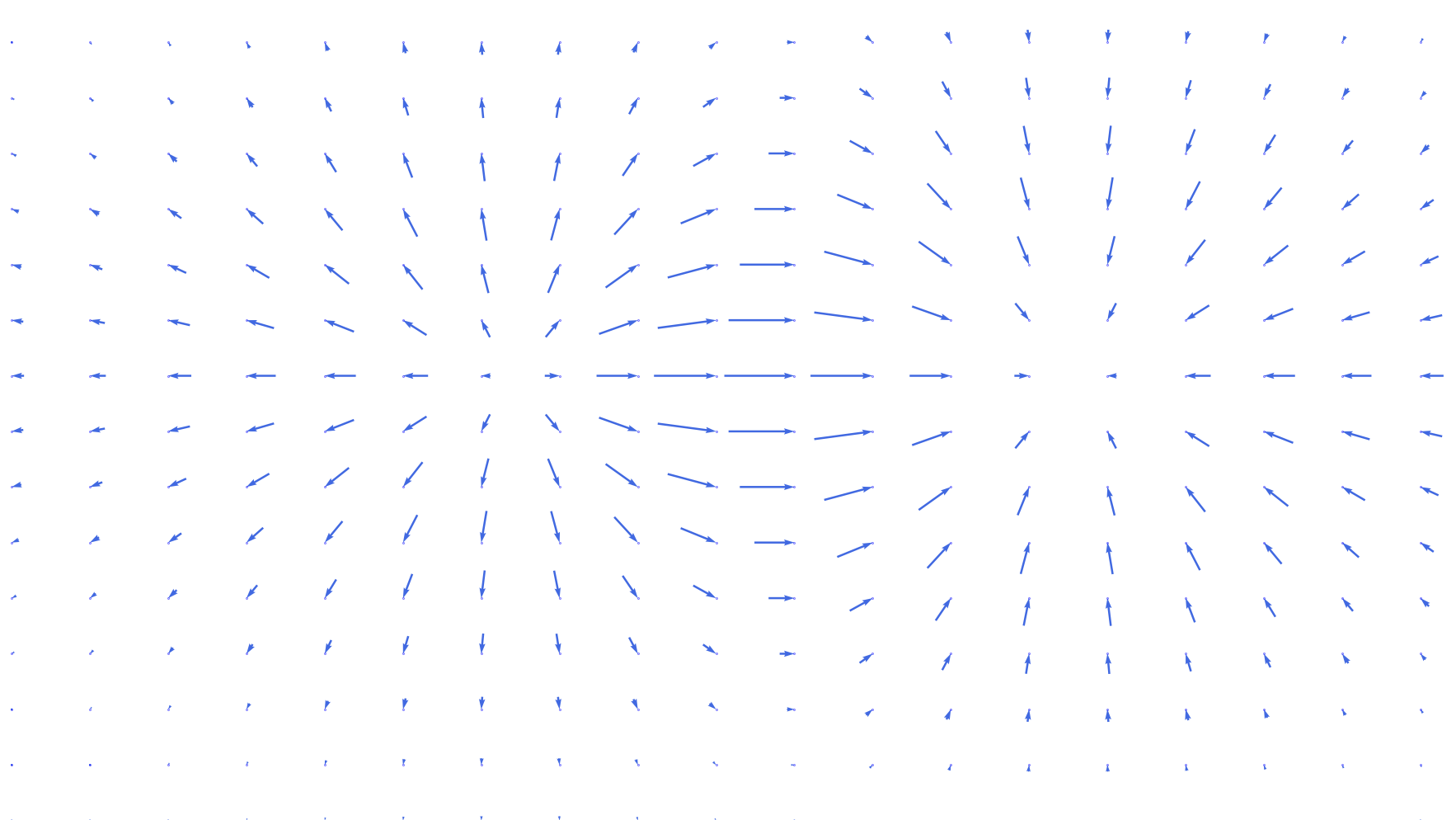
方向场:设函数
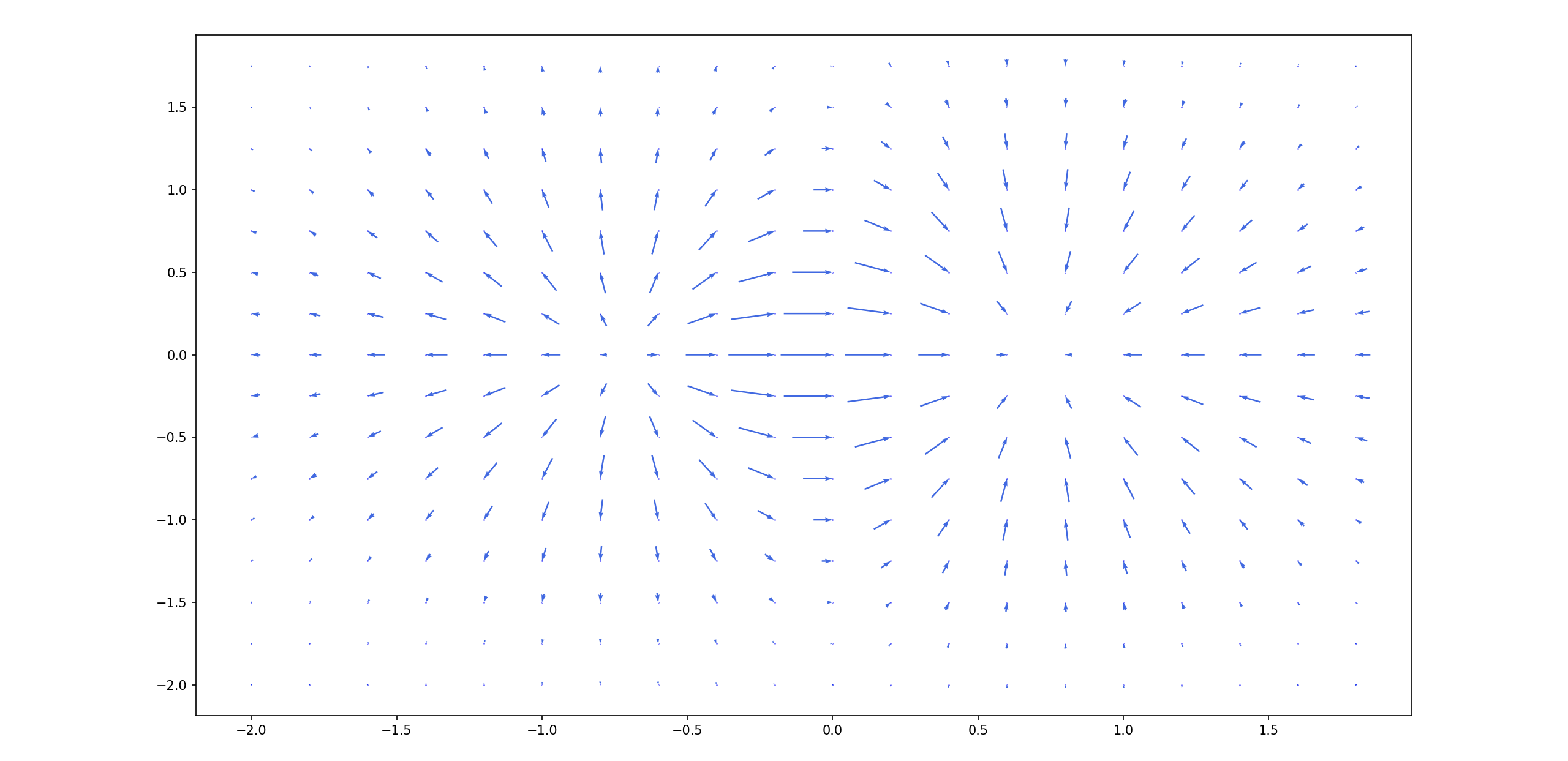
-
等倾斜线:在方向场中,方向相同的点的几何轨迹称为 等倾斜线
-
方程组积分曲线:设方程组
是一参数方程,积分曲线是点
4. 驻定与非驻定
- 驻定(自治):如果方程组右端不含自变量
- 非驻定(非自治):如果方程组右端含自变量
- 非驻定可化为驻定方程组:令
5. 微分方程所定义的动力系统
- 动力系统:对
- 由驻定微分方程组过
__EOF__

本文作者:RadiumGalaxy
本文链接:https://www.cnblogs.com/RadiumGalaxy/p/17235199.html
关于博主:评论和私信会在第一时间回复。或者直接私信我。
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!
声援博主:如果您觉得文章对您有帮助,可以点击文章右下角【推荐】一下。您的鼓励是博主的最大动力!
本文链接:https://www.cnblogs.com/RadiumGalaxy/p/17235199.html
关于博主:评论和私信会在第一时间回复。或者直接私信我。
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!
声援博主:如果您觉得文章对您有帮助,可以点击文章右下角【推荐】一下。您的鼓励是博主的最大动力!


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· Manus的开源复刻OpenManus初探
· AI 智能体引爆开源社区「GitHub 热点速览」
· 三行代码完成国际化适配,妙~啊~
· .NET Core 中如何实现缓存的预热?