
Teledyne Dalsa线扫描彩色成像技术
TELEDYNE 线扫彩色成像
不同于面扫描相机,线扫描相机一次采集一条线,并连续采集多条线组合成一副二维图像。由于硅芯片传感器无法自行区分波长,因此必须在成像芯片采集到图像前先将颜色,即红色(R)、绿色(G)和蓝色(B),根据光谱进行分离。目前主要采用三大技术:三芯片、三线及双线技术(如下图)
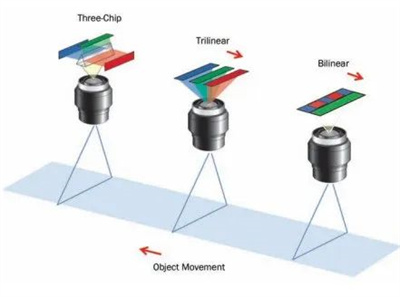
线扫描彩色成像技术示意图从左往右:三芯片、三线技术、双线技术。三线技术采用空间校正重建全色彩图像。双线性技术的空间校正最小
TELEDYNE 三芯片相机
三芯片线扫描相机(3CCD或3CMOS)采用一个基于棱镜的分光器,将光分解成红绿蓝三个基色。棱镜利用光波干涉分解波长,其滤波响应通常是平顶的,且两端垂直下降。随后,通过结合三个芯片采集到的红绿蓝图像重构成一张彩色图像。三个芯片相机通过同一个光轴,可以同步采集到移动物体上同一位置的红绿蓝色图像。因此,该项技术图像配准出众,非常适合对不平整表面、旋转表面、下坠物体等进行成像。三芯片线扫描相机的劣势在于相机成本高,且需要搭配较为昂贵的光学镜头。由于棱镜会造成后焦偏移和像差,因此三芯片相机需要搭配特殊设计的镜头使用。相机机身通常较大,以便装载棱镜和三个芯片。Teledyne DALSA的Trillium相机是首批上市的三芯片相机之一。
TELEDYNE 三线技术
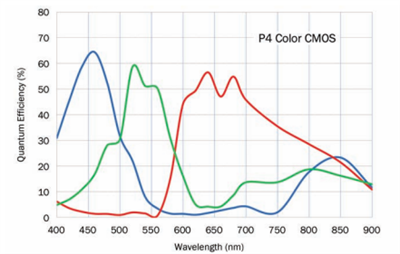
大量应用已经采用三线技术,该技术使用成像芯片上的三线阵――分别为红色、绿色和蓝色通道。在操作中,各条线阵对应的每个颜色同时采集位于移动物体上略微不同位置的图像。硅片上滤镜镀有吸收染料或颜料。由于线扫描成像通常要求强光条件,因此滤镜必须具备高耐光性(7至8度)。此外,还必须能够承受250°C的高温,这对避免褪色非常重要。为了将三条色彩通道结合成一张全彩图像,相机必须弥补空间分离的问题,也就是进行所谓的空间校正。通常将第一和第二线阵进行缓存,然后与第三线阵匹配结合。得益于三线技术优越的性价比,该技术正在许多应用领域逐渐流行起来。其简化了相机设计,提供出色的图像品质,并且机身小巧。此外,该技术还通过搭配标准镜头进一步降低系统成本。Teledyne DALSA的Piranha Color三线2 k/14 µm及4 k/10 µm CCD相机已经成为高速应用领域的行业领先产品。新款Piranha4 Color线性CMOS相机将速度提升至4 k分辨率70 kHz行频。得益于最新设计,量子效率也得到了显著提高。(参照下图)
TELEDYNE 双线技术
双线相机与三线相机拥有许多相同的优势,但是成像芯片上仅有两个线阵。两个线阵通常并排排列,从而降低对空间校正的要求。双线芯片可以捕捉每个像素的两种原色。为了重建全色图像,需要插值计算得出第三色。可以通过特定的传感器架构设计改善空间串扰,同时也可以通过特定的滤镜布置降低光谱串扰。举例来说,Teledyne DALSA的Spyder3 Color CCD及Piranha4 Color 8 k CMOS相机采用不同于贝尔阵列(见下图)的特殊RG/BG彩色阵列。对比贝尔阵列,特殊RG/BG彩色阵列的一条线阵将红色和蓝色通道并排间隔分布(两者在光谱上的光谱重叠较少)来降低串扰。此外,另一线阵为100%填充因子的全绿色通道,也可以被用作黑白通道。而且,双线相机成本相对更低。此技术主要适用于电子产品制造、食物检查、材料分拣等领域。图5 (c)和5 (d)分别显示了Piranha Color三线相机获取的邮票图像和Spyder3 Color双线相机获取的邮票图像。滤镜阵列有助于显著提高色彩保真度。
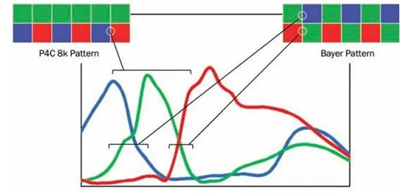
双线色彩阵列光谱重叠对比:Piranha4 Color 8 k/7 µm相机采用独特的色彩阵列,可以将通道间光谱串扰降至最低,同时提供100%填充因子的绿色单通道。

TELEDYNE 亚像素精度的空间校正
空间校正,在使用三线技术获取精确彩色图像的应用中至关重要。目前已经实现在亚像素级别对空间进行校正的先进技术。下图显示了3种采样情形:
(空间校正参数(sc)取决于物体在一个外部同步周期中移动的距离(d)与像素采样的实际尺寸(p/β)。其中,p代表传感器的像素大小,β代表光学放大。)
d < p/β:物体运行速度低于相机扫描速度;d = p/β:物体运行速度等于相机扫描速度(方形像素);d > p/β:物体运行速度高于相机扫描速度。其中d代表一个外部同步周期中的物体移动的距离,p代表传感器的像素大小,β代表光学放大。则p/β代表每个像素采样的实际尺寸。
就方形像素而言,一个外部同步周期中物体移动的距离(d)与像素采样的实际尺寸(p/β)相同。在这一情况下,空间校正等于RGB阵列间行间距数量。就Piranha Color和Piranha4 Color三线相机而言,是整数3。当相机在此情形中运行时,相机自动延迟3行,以将RGB三通道同时匹配输出。但是,在一些应用中,相机在N:1纵横比的情况下运行。举例来说,在许多检测系统的设计中,物体运行速度比相机的扫描速度快许多,以便提高系统处理能力。这就导致图像出现非方形“压缩”像素。另一方面,由于受到编码器及镜头放大等限制,物体运行速度也可能低于相机扫描速度。这就导致非方形“拉伸”像素。在非方形像素情形下,以整数3进行空间校正将导致边缘颜色失真。参见下图:
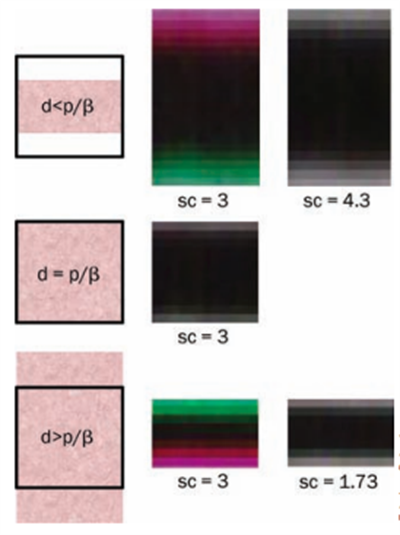
Pirahna4 Color 三线相机在不同示例情境和空间校正参数(sc)中捕捉的黑白条图像。在d ≠ p/β的情况下,精确到小数点的行延迟能够校正非方形像素采样情况下的边缘颜色失真。
亚像素空间校正可以补偿精确到小数点的行延迟,以校正N:1纵横比情形下的误差。图6b即显示了在不同采样情形下的黑白方块的图像,沿竖直方向扫描。在方形像素的情况下,采用空间校正参数sc=3重建图像。但是,在非方形像素情况下,需要精确到小数点的行延迟(分别为sc=4.3和1.73)以校正误差。亚像素空间校正是Teledyne DALSA的Pirahna4 Color相机的先进特点之一。此外,亚像素空间校正还可以用于补偿和重建相机与物体表面不垂直的情况下捕捉的图像。






【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)
· winform 绘制太阳,地球,月球 运作规律
2021-03-20 电脑电源功率选择