
设备精度分析
轴组精度分析
一:轴组精度量测项目
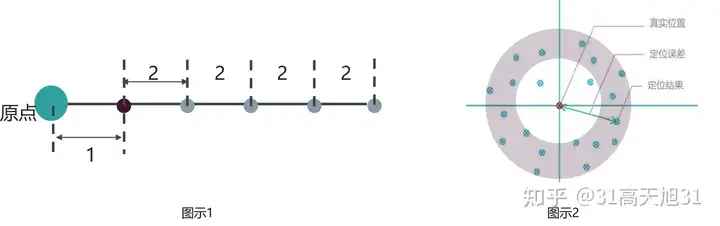
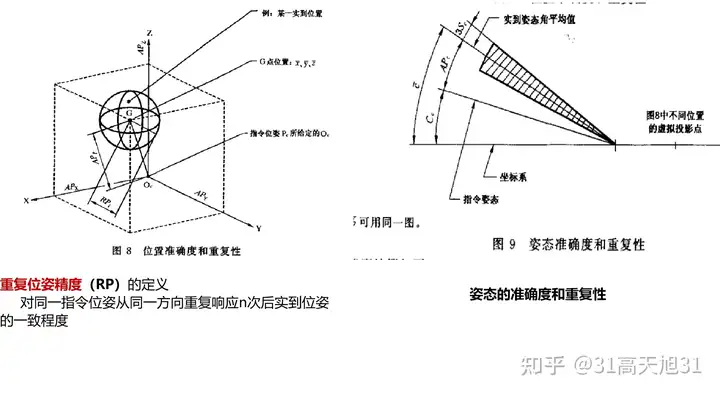
1:定位精度(绝对):是理论空间实体位置信息(通常为原点坐标)与其真实位置之间的接近程度。(如图示1)定位精度是有个原点位做参照 每次定位精度都以原点位来计算精度误差。
2. 重复定位精度(相对):是指在同一台传动系统中,对于相同输入值,系统所表现的一致程度。(如图示2) 重复定位精度就是没有原点位置,每次定位都是不规则的两点之间的位置精度
二:轴组精度量测方式
如何量测?好的精度,一定是检测出来的。理论逻辑一般检测目标为末端执行器精度。量测理论需遵循MSA或者VDA5体系资料逻辑,这是一个庞大的系统,有机会在做分享。

主动式内部量测方式
常见方式有:
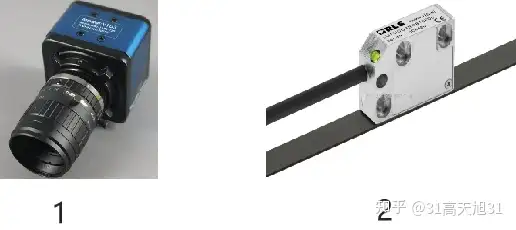
1.设备自带视觉系统,可使用机器视觉进行量测,类似OMM的视觉算法量测技术。
2. 设备有光栅尺,利用光栅尺,细分计数卡,工控机进行检测。
被动式外部部量测方式
常见方式和设备有:
1:固定点检测。千分表。
2:多点直线检测。激光干涉仪。
3:多点三维坐标检测。激光跟踪仪。
4:多点回转检测。角摆仪

三:轴组精度量测对象
先假设轴组光栅尺,电机性能满足设计要求,在速度加速度,整定时间,负载一定的前提下
四:轴组精度量测数据体现
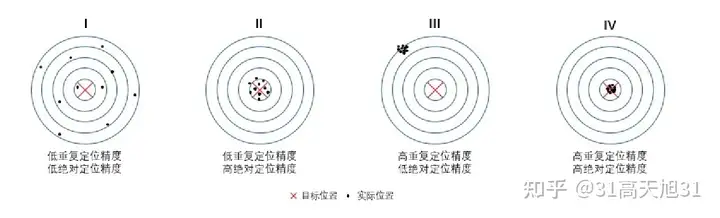
对于I而言,属于重复和绝对定位精度均较低的情况
具体的特征就是实际位置分散无序,一般这类情况在成熟的机械臂应用中出现较少,即结构刚度&传动与运动控制都出现了相应问题;
对于II而言,属于重复定位精度低&绝对定位精度高的情况
实际位置小幅度无序地分布在目标位置周围,一般这类情况的出现可能是机械臂的刚度较低或者传动环节出了问题,运动控制大概率是没有问题的;
对于III而言,属于重复定位精度高&绝对定位精度低的情况
实际位置集中分布在远离目标位置的某处,一般这类情况的出现可能是运动控制的某个环节出现了问题,诸如需要重新做下位置标定或目标位置下发错误等,本体上的刚度和传动环节大概率不会出现问题;
对于IV而言,属于重复定位精度高&绝对定位精度高的情况
实际位置集中分布在目标位置处,这就是机械臂末端理想需要做到的性能效果;
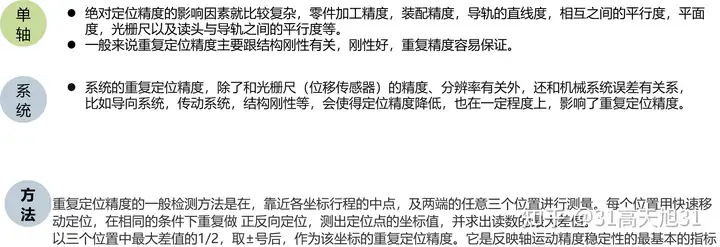
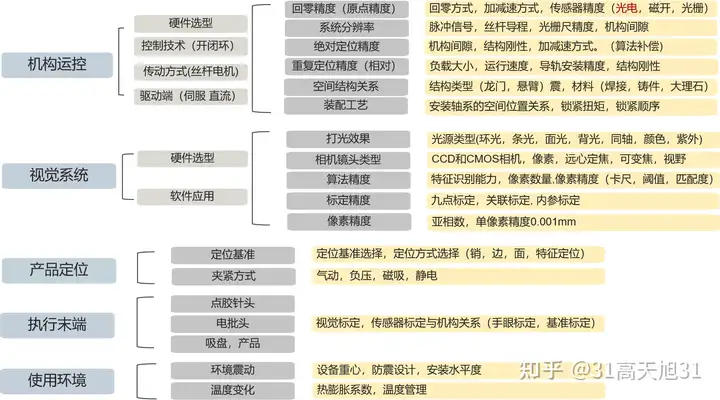
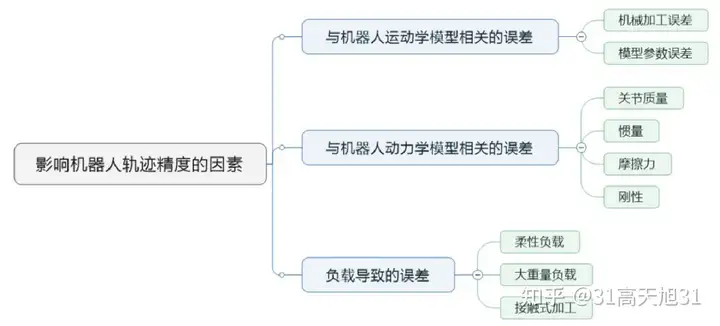
五:设备精度影响因素
知识点太多,来张图说明
机器人精度
一:基本缩略
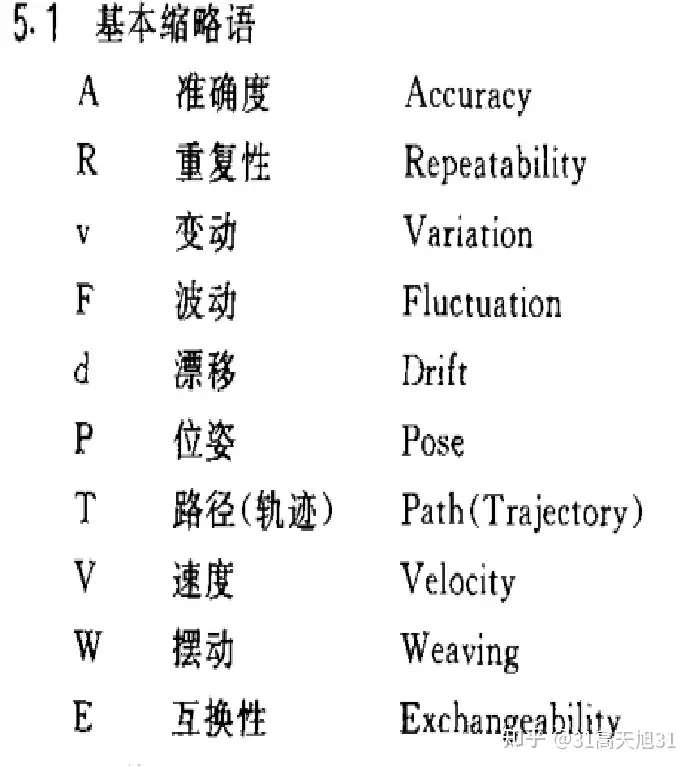
具体详情量测方法与说明可以参照GB-T12642
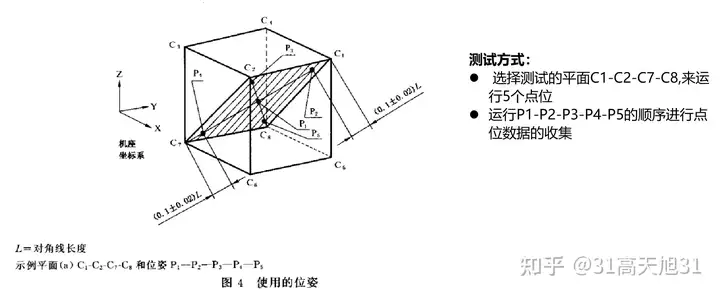
机器人重复位姿精度(RP)的定义:对同一指令位姿从同一方向重复响应n次后实到位姿的一致程度
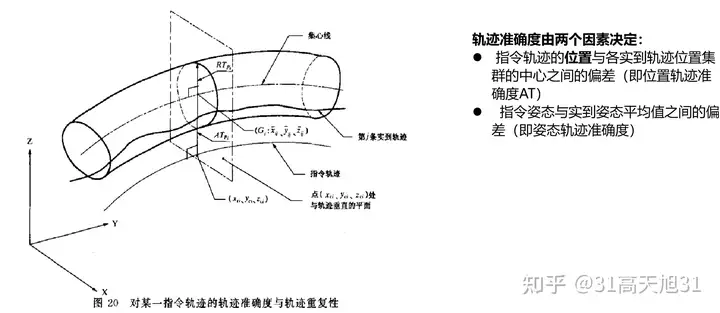
机器人重复路径精度(RT)的定义:对同一指令轨迹重复n次后实到轨迹的一致程度
机器人轨迹准确度(AT)的定义:对同一指令轨迹再位置和姿态上沿所得轨迹的最大轨迹偏差
二:工业机器人的技术参数
1、机器人负载
2、重复精度
组装工艺的机器人精度的选型要求,也关联组装各环节尺寸和公差的传递和计算,
比如:
来料物料的定位精度,工件本身的在治具中的重复定位精度等。
这项指标从2D方面以正负 ± 表示。事实上,由于机器人的运动重复点不是线性的而是在空间3D运动,该参数的实际情况可以是在公差半径内的球形空间内任何位置。
3、机器人臂展
4、机器人重量
5、速度
6、防护等级
三:关键精度参数
四:机器人影响因数
当我们需要严谨地去描述一个机械臂的重复定位精度时,实际上是需要4个量:1个位置重复定位精度与3个朝向重复定位精度
本质上来说,机械臂末端的笛卡尔空间是多维的,既有平移(translation)也有旋转(orientation),
我们看到绝大多数厂家手册中在重复定位精度仅给了单一的平移量,其是这是一种基于实际情况的简化,
因为大多数应用场景只需要考虑末端位置平移上的误差,对旋转朝向的偏差值有较大的容忍度

 浙公网安备 33010602011771号
浙公网安备 33010602011771号